 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-Enabled Neighboring Extremal: Case Study on Model-Free Trajectory Tracking for Robotic Arm
Paper and Code
Apr 09, 2025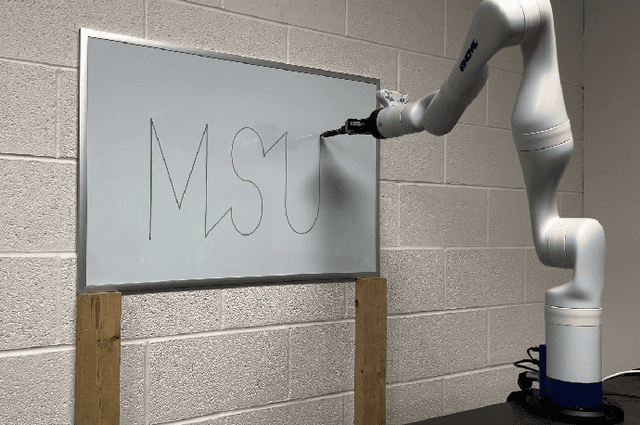
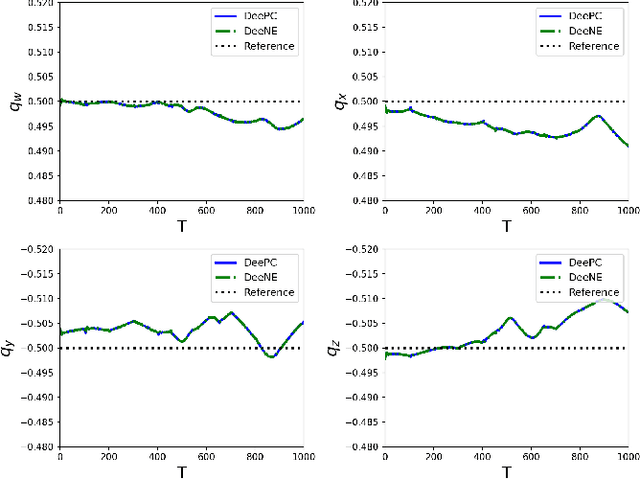
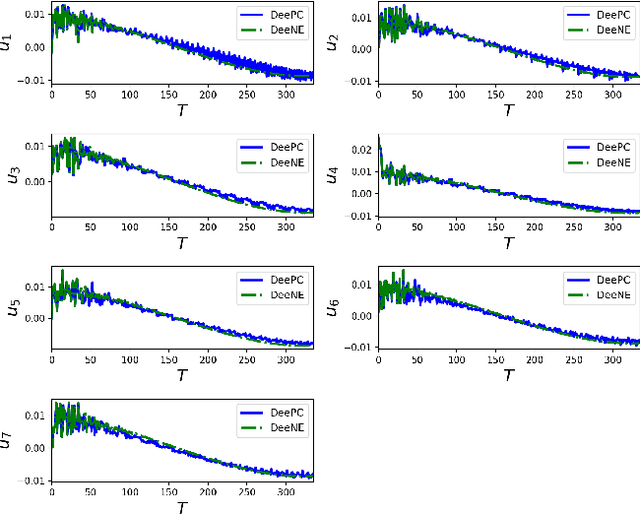
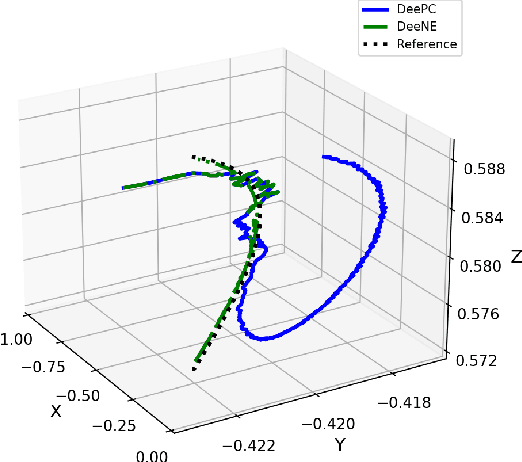
Data-enabled predictive control (DeePC) has recently emerged as a powerful data-driven approach for efficient system controls with constraints handling capabilities. It performs optimal controls by directly harnessing input-output (I/O) data, bypassing the process of explicit model identification that can be costly and time-consuming. However, its high computational complexity, driven by a large-scale optimization problem (typically in a higher dimension than its model-based counterpart--Model Predictive Control), hinders real-time applications. To overcome this limitation, we propose the data-enabled neighboring extremal (DeeNE) framework, which significantly reduces computational cost while preserving control performance. DeeNE leverages first-order optimality perturbation analysis to efficiently update a precomputed nominal DeePC solution in response to changes in initial conditions and reference trajectories. We validate its effectiveness on a 7-DoF KINOVA Gen3 robotic arm, demonstrating substantial computational savings and robust, data-driven control performance.