 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLane Change Trajectory Planning for Personalized Driving Comfort and Mobility Efficiency
Jun 05, 2026Lane changing entails simultaneous longitudinal and lateral motions that affect driving comfort and mobility efficiency. Because these motions are tightly coupled and subject to substantial inter-vehicle variability, trajectory planning for lane-change maneuvers is characterized by a highly personalized nature. This study proposes a neural network-driven planner that integrates a third-order polynomial trajectory generator with a learning module that infers optimal trajectory parameters across diverse driving conditions. Using a shared backbone with dual heads, one head ensures all-condition operational guarantees, while the other captures driver-specific preferences for comfort or mobility efficiency. A head-gated switching mechanism, realized through a statistical gate based on error-winner logistic regression, adaptively selects the appropriate head under varying driving conditions, which enables context-aware lane-change trajectory planning. Representative cases and Monte Carlo simulations show that the proposed planner achieves personalized comfort and mobility during lane changes, while the baseline ensures feasible trajectories under driving conditions where personalized data are insufficient or inaccessible.
Velocity-Form Data-Enabled Predictive Control of Soft Robots under Unknown External Payloads
Oct 06, 2025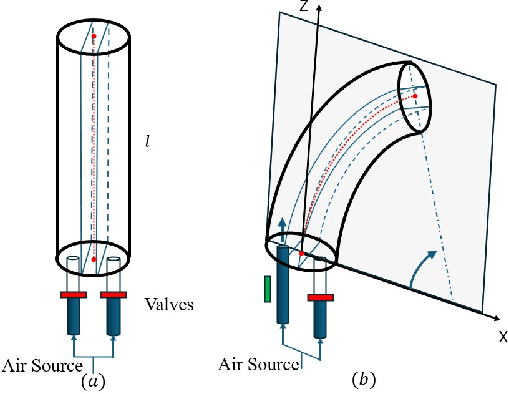
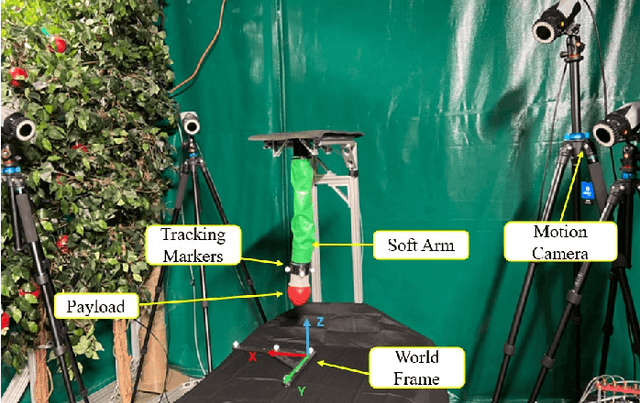
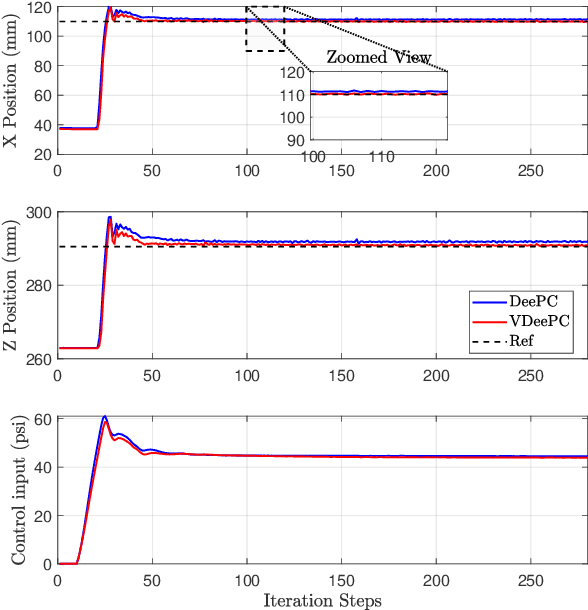
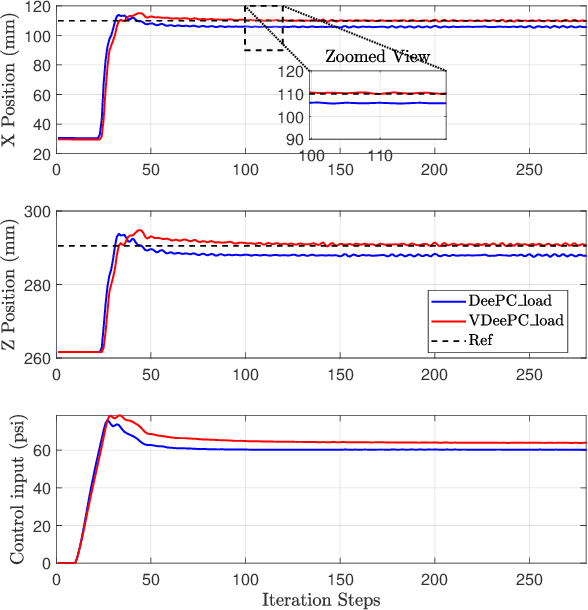
Data-driven control methods such as data-enabled predictive control (DeePC) have shown strong potential in efficient control of soft robots without explicit parametric models. However, in object manipulation tasks, unknown external payloads and disturbances can significantly alter the system dynamics and behavior, leading to offset error and degraded control performance. In this paper, we present a novel velocity-form DeePC framework that achieves robust and optimal control of soft robots under unknown payloads. The proposed framework leverages input-output data in an incremental representation to mitigate performance degradation induced by unknown payloads, eliminating the need for weighted datasets or disturbance estimators. We validate the method experimentally on a planar soft robot and demonstrate its superior performance compared to standard DeePC in scenarios involving unknown payloads.
Discovery Learning accelerates battery design evaluation
Aug 09, 2025Fast and reliable validation of novel designs in complex physical systems such as batteries is critical to accelerating technological innovation. However, battery research and development remain bottlenecked by the prohibitively high time and energy costs required to evaluate numerous new design candidates, particularly in battery prototyping and life testing. Despite recent progress in data-driven battery lifetime prediction, existing methods require labeled data of target designs to improve accuracy and cannot make reliable predictions until after prototyping, thus falling far short of the efficiency needed to enable rapid feedback for battery design. Here, we introduce Discovery Learning (DL), a scientific machine-learning paradigm that integrates active learning, physics-guided learning, and zero-shot learning into a human-like reasoning loop, drawing inspiration from learning theories in educational psychology. DL can learn from historical battery designs and actively reduce the need for prototyping, thus enabling rapid lifetime evaluation for unobserved material-design combinations without requiring additional data labeling. To test DL, we present 123 industrial-grade large-format lithium-ion pouch cells, spanning eight material-design combinations and diverse cycling protocols. Trained solely on public datasets of small-capacity cylindrical cells, DL achieves 7.2% test error in predicting the average cycle life under unknown device variability. This results in savings of 98% in time and 95% in energy compared to industrial practices. This work highlights the potential of uncovering insights from historical designs to inform and accelerate the development of next-generation battery technologies. DL represents a key advance toward efficient data-driven modeling and helps realize the promise of machine learning for accelerating scientific discovery and engineering innovation.
Enhanced Battery Capacity Estimation in Data-Limited Scenarios through Swarm Learning
Apr 16, 2025Data-driven methods have shown potential in electric-vehicle battery management tasks such as capacity estimation, but their deployment is bottlenecked by poor performance in data-limited scenarios. Sharing battery data among algorithm developers can enable accurate and generalizable data-driven models. However, an effective battery management framework that simultaneously ensures data privacy and fault tolerance is still lacking. This paper proposes a swarm battery management system that unites a decentralized swarm learning (SL) framework and credibility weight-based model merging mechanism to enhance battery capacity estimation in data-limited scenarios while ensuring data privacy and security. The effectiveness of the SL framework is validated on a dataset comprising 66 commercial LiNiCoAlO2 cells cycled under various operating conditions. Specifically, the capacity estimation performance is validated in four cases, including data-balanced, volume-biased, feature-biased, and quality-biased scenarios. Our results show that SL can enhance the estimation accuracy in all data-limited cases and achieve a similar level of accuracy with central learning where large amounts of data are available.
Data-Enabled Neighboring Extremal: Case Study on Model-Free Trajectory Tracking for Robotic Arm
Apr 09, 2025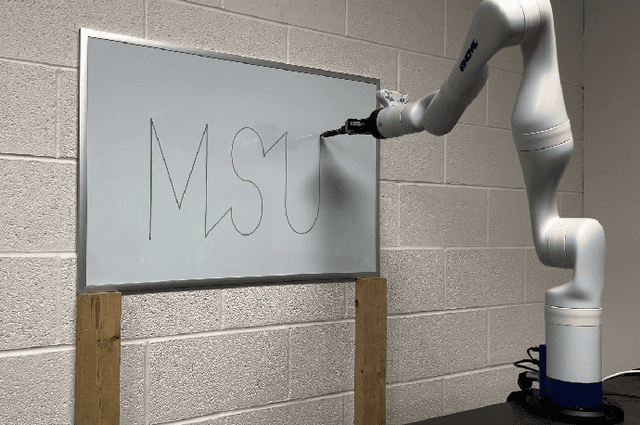
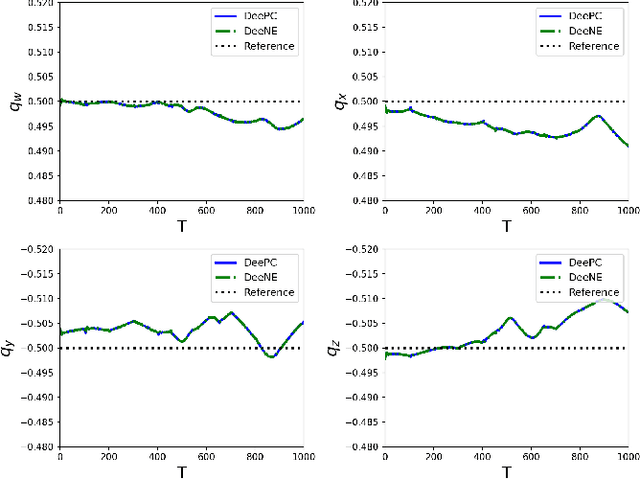
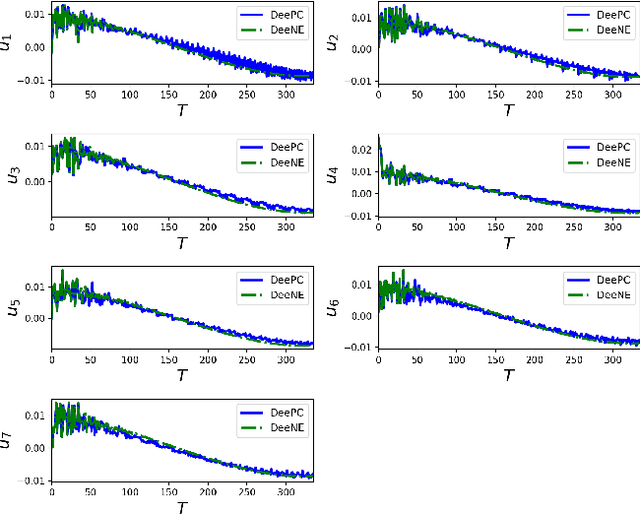
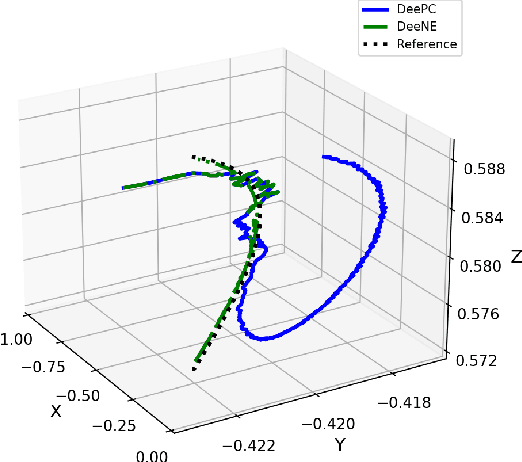
Data-enabled predictive control (DeePC) has recently emerged as a powerful data-driven approach for efficient system controls with constraints handling capabilities. It performs optimal controls by directly harnessing input-output (I/O) data, bypassing the process of explicit model identification that can be costly and time-consuming. However, its high computational complexity, driven by a large-scale optimization problem (typically in a higher dimension than its model-based counterpart--Model Predictive Control), hinders real-time applications. To overcome this limitation, we propose the data-enabled neighboring extremal (DeeNE) framework, which significantly reduces computational cost while preserving control performance. DeeNE leverages first-order optimality perturbation analysis to efficiently update a precomputed nominal DeePC solution in response to changes in initial conditions and reference trajectories. We validate its effectiveness on a 7-DoF KINOVA Gen3 robotic arm, demonstrating substantial computational savings and robust, data-driven control performance.
Data-Driven Quantification of Battery Degradation Modes via Critical Features from Charging
Dec 13, 2024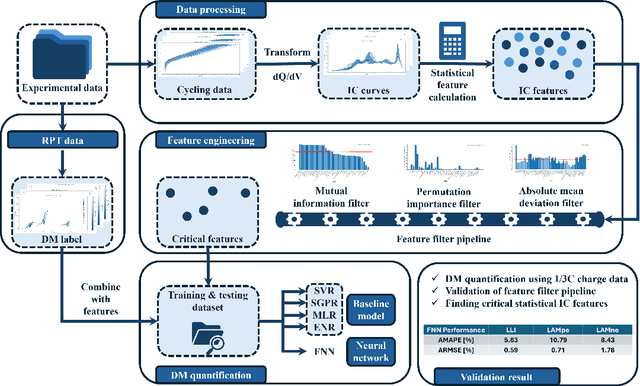

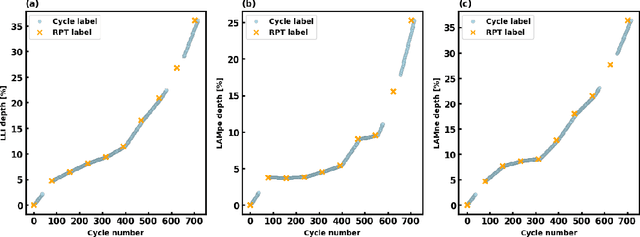
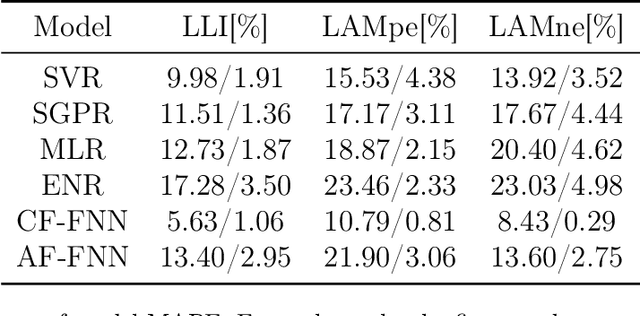
Battery degradation modes influence the aging behavior of Li-ion batteries, leading to accelerated capacity loss and potential safety issues. Quantifying these aging mechanisms poses challenges for both online and offline diagnostics in charging station applications. Data-driven algorithms have emerged as effective tools for addressing state-of-health issues by learning hard-to-model electrochemical properties from data. This paper presents a data-driven method for quantifying battery degradation modes. Ninety-one statistical features are extracted from the incremental capacity curve derived from 1/3C charging data. These features are then screened based on dispersion, contribution, and correlation. Subsequently, machine learning models, including four baseline algorithms and a feedforward neural network, are used to estimate the degradation modes. Experimental validation indicates that the feedforward neural network outperforms the others, achieving a root mean square error of around 10\% across all three degradation modes (i.e., loss of lithium inventory, loss of active material on the positive electrode, and loss of active material on the negative electrode). The findings in this paper demonstrate the potential of machine learning for diagnosing battery degradation modes in charging station scenarios.
Driving behavior-guided battery health monitoring for electric vehicles using machine learning
Sep 25, 2023



An accurate estimation of the state of health (SOH) of batteries is critical to ensuring the safe and reliable operation of electric vehicles (EVs). Feature-based machine learning methods have exhibited enormous potential for rapidly and precisely monitoring battery health status. However, simultaneously using various health indicators (HIs) may weaken estimation performance due to feature redundancy. Furthermore, ignoring real-world driving behaviors can lead to inaccurate estimation results as some features are rarely accessible in practical scenarios. To address these issues, we proposed a feature-based machine learning pipeline for reliable battery health monitoring, enabled by evaluating the acquisition probability of features under real-world driving conditions. We first summarized and analyzed various individual HIs with mechanism-related interpretations, which provide insightful guidance on how these features relate to battery degradation modes. Moreover, all features were carefully evaluated and screened based on estimation accuracy and correlation analysis on three public battery degradation datasets. Finally, the scenario-based feature fusion and acquisition probability-based practicality evaluation method construct a useful tool for feature extraction with consideration of driving behaviors. This work highlights the importance of balancing the performance and practicality of HIs during the development of feature-based battery health monitoring algorithms.
ABatRe-Sim: A Comprehensive Framework for Automated Battery Recycling Simulation
Mar 14, 2023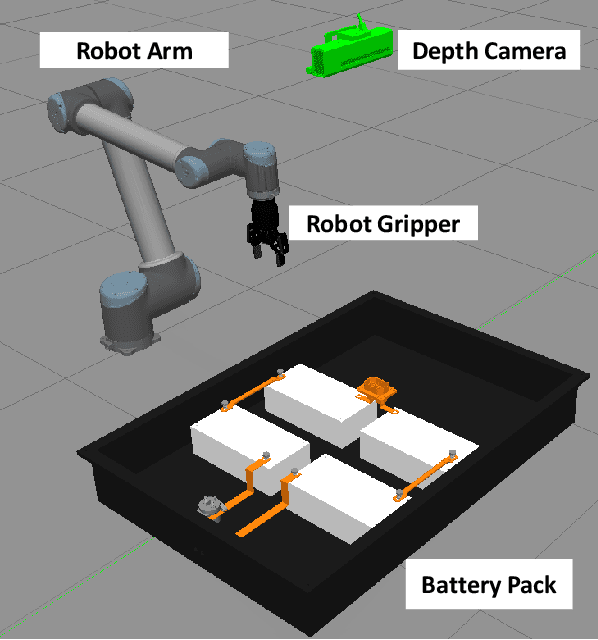
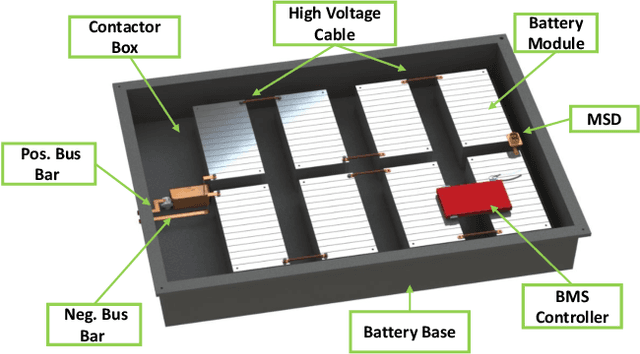
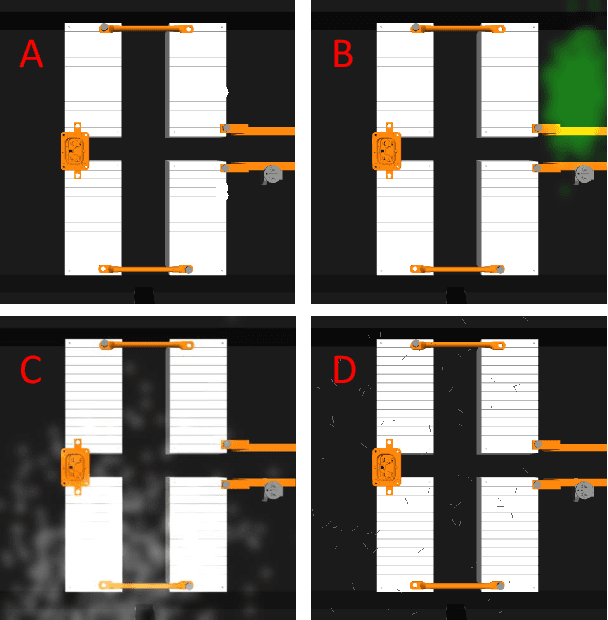
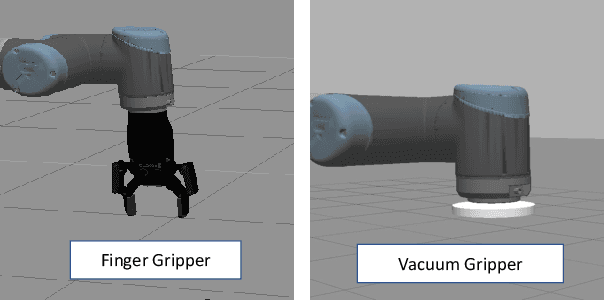
With the rapid surge in the number of on-road Electric Vehicles (EVs), the amount of spent lithium-ion (Li-ion) batteries is also expected to explosively grow. The spent battery packs contain valuable metal and materials that should be recovered, recycled, and reused. However, only less than 5% of the Li-ion batteries are currently recycled, due to a multitude of challenges in technology, logistics and regulation. Existing battery recycling is performed manually, which can pose a series of risks to the human operator as a consequence of remaining high voltage and chemical hazards. Therefore, there is a critical need to develop an automated battery recycling system. In this paper, we present ABatRe-sim, an open-source robotic battery recycling simulator, to facilitate the research and development in efficient and effective battery recycling au-omation. Specifically, we develop a detailed CAD model of the battery pack (with screws, wires, and battery modules), which is imported into Gazebo to enable robot-object interaction in the robot operating system (ROS) environment. It also allows the simulation of battery packs of various aging conditions. Furthermore, perception, planning, and control algorithms are developed to establish the benchmark to demonstrate the interface and realize the basic functionalities for further user customization. Discussions on the utilization and future extensions of the simulator are also presented.