 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancement and Field Evaluation of a Dual-arm Apple Harvesting Robot
Jun 06, 2025Apples are among the most widely consumed fruits worldwide. Currently, apple harvesting fully relies on manual labor, which is costly, drudging, and hazardous to workers. Hence, robotic harvesting has attracted increasing attention in recent years. However, existing systems still fall short in terms of performance, effectiveness, and reliability for complex orchard environments. In this work, we present the development and evaluation of a dual-arm harvesting robot. The system integrates a ToF camera, two 4DOF robotic arms, a centralized vacuum system, and a post-harvest handling module. During harvesting, suction force is dynamically assigned to either arm via the vacuum system, enabling efficient apple detachment while reducing power consumption and noise. Compared to our previous design, we incorporated a platform movement mechanism that enables both in-out and up-down adjustments, enhancing the robot's dexterity and adaptability to varying canopy structures. On the algorithmic side, we developed a robust apple localization pipeline that combines a foundation-model-based detector, segmentation, and clustering-based depth estimation, which improves performance in orchards. Additionally, pressure sensors were integrated into the system, and a novel dual-arm coordination strategy was introduced to respond to harvest failures based on sensor feedback, further improving picking efficiency. Field demos were conducted in two commercial orchards in MI, USA, with different canopy structures. The system achieved success rates of 0.807 and 0.797, with an average picking cycle time of 5.97s. The proposed strategy reduced harvest time by 28% compared to a single-arm baseline. The dual-arm harvesting robot enhances the reliability and efficiency of apple picking. With further advancements, the system holds strong potential for autonomous operation and commercialization for the apple industry.
Data-Enabled Neighboring Extremal: Case Study on Model-Free Trajectory Tracking for Robotic Arm
Apr 09, 2025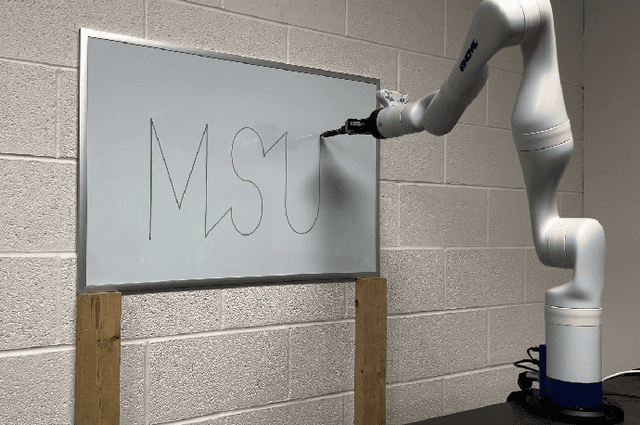
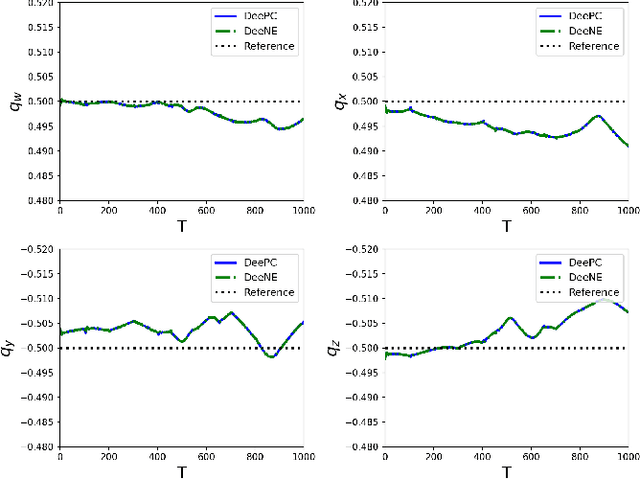
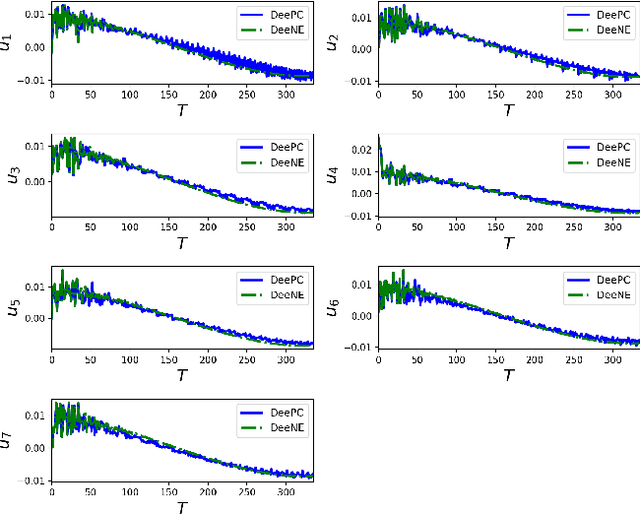
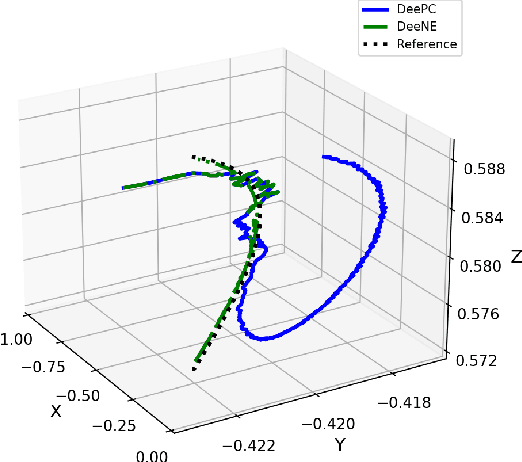
Data-enabled predictive control (DeePC) has recently emerged as a powerful data-driven approach for efficient system controls with constraints handling capabilities. It performs optimal controls by directly harnessing input-output (I/O) data, bypassing the process of explicit model identification that can be costly and time-consuming. However, its high computational complexity, driven by a large-scale optimization problem (typically in a higher dimension than its model-based counterpart--Model Predictive Control), hinders real-time applications. To overcome this limitation, we propose the data-enabled neighboring extremal (DeeNE) framework, which significantly reduces computational cost while preserving control performance. DeeNE leverages first-order optimality perturbation analysis to efficiently update a precomputed nominal DeePC solution in response to changes in initial conditions and reference trajectories. We validate its effectiveness on a 7-DoF KINOVA Gen3 robotic arm, demonstrating substantial computational savings and robust, data-driven control performance.
Foundation Model-Based Apple Ripeness and Size Estimation for Selective Harvesting
Feb 03, 2025

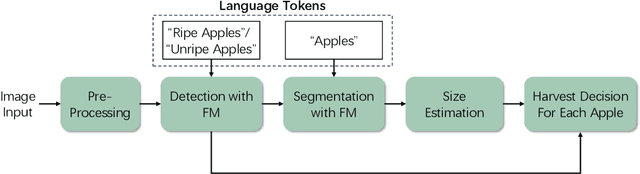
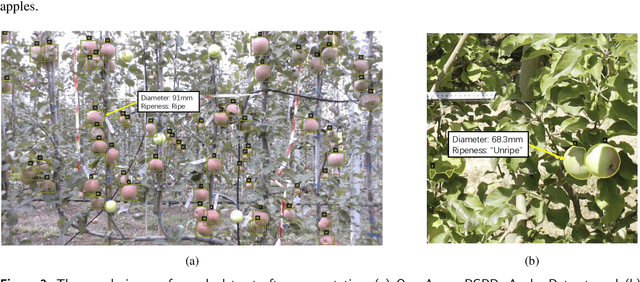
Harvesting is a critical task in the tree fruit industry, demanding extensive manual labor and substantial costs, and exposing workers to potential hazards. Recent advances in automated harvesting offer a promising solution by enabling efficient, cost-effective, and ergonomic fruit picking within tight harvesting windows. However, existing harvesting technologies often indiscriminately harvest all visible and accessible fruits, including those that are unripe or undersized. This study introduces a novel foundation model-based framework for efficient apple ripeness and size estimation. Specifically, we curated two public RGBD-based Fuji apple image datasets, integrating expanded annotations for ripeness ("Ripe" vs. "Unripe") based on fruit color and image capture dates. The resulting comprehensive dataset, Fuji-Ripeness-Size Dataset, includes 4,027 images and 16,257 annotated apples with ripeness and size labels. Using Grounding-DINO, a language-model-based object detector, we achieved robust apple detection and ripeness classification, outperforming other state-of-the-art models. Additionally, we developed and evaluated six size estimation algorithms, selecting the one with the lowest error and variation for optimal performance. The Fuji-Ripeness-Size Dataset and the apple detection and size estimation algorithms are made publicly available, which provides valuable benchmarks for future studies in automated and selective harvesting.
ABatRe-Sim: A Comprehensive Framework for Automated Battery Recycling Simulation
Mar 14, 2023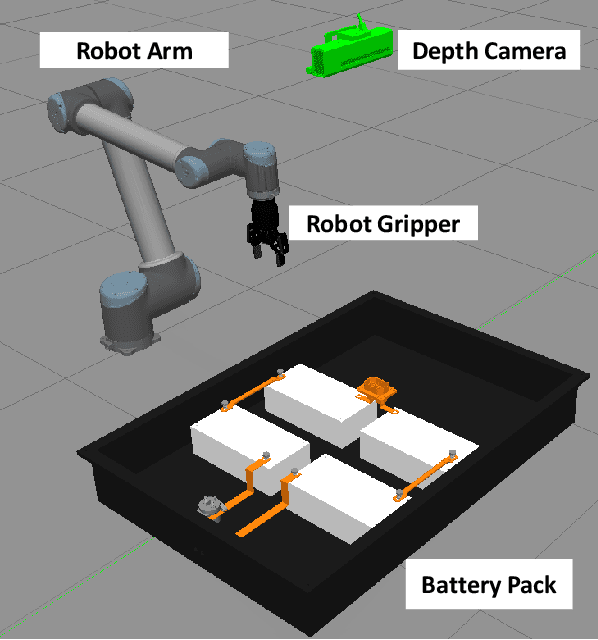
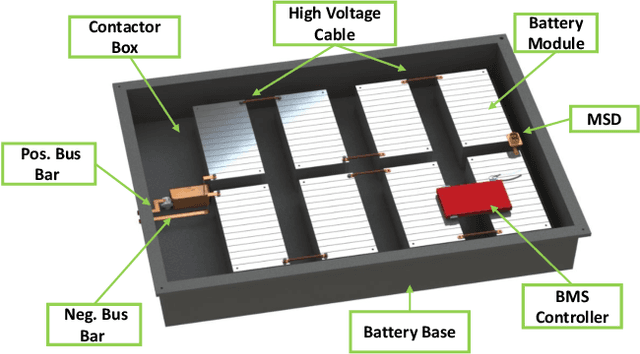
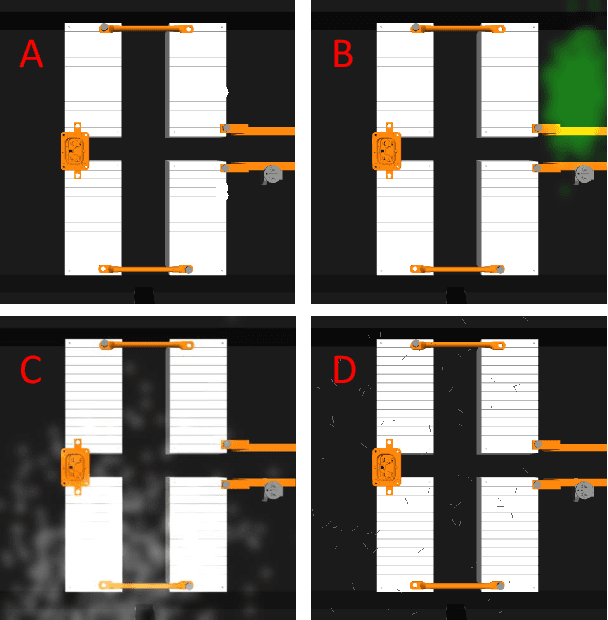
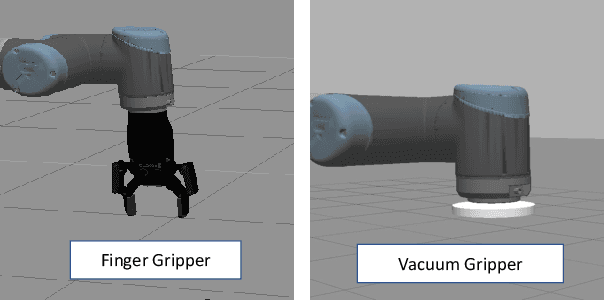
With the rapid surge in the number of on-road Electric Vehicles (EVs), the amount of spent lithium-ion (Li-ion) batteries is also expected to explosively grow. The spent battery packs contain valuable metal and materials that should be recovered, recycled, and reused. However, only less than 5% of the Li-ion batteries are currently recycled, due to a multitude of challenges in technology, logistics and regulation. Existing battery recycling is performed manually, which can pose a series of risks to the human operator as a consequence of remaining high voltage and chemical hazards. Therefore, there is a critical need to develop an automated battery recycling system. In this paper, we present ABatRe-sim, an open-source robotic battery recycling simulator, to facilitate the research and development in efficient and effective battery recycling au-omation. Specifically, we develop a detailed CAD model of the battery pack (with screws, wires, and battery modules), which is imported into Gazebo to enable robot-object interaction in the robot operating system (ROS) environment. It also allows the simulation of battery packs of various aging conditions. Furthermore, perception, planning, and control algorithms are developed to establish the benchmark to demonstrate the interface and realize the basic functionalities for further user customization. Discussions on the utilization and future extensions of the simulator are also presented.
To Explore or Not to Explore: Regret-Based LTL Planning in Partially-Known Environments
Apr 01, 2022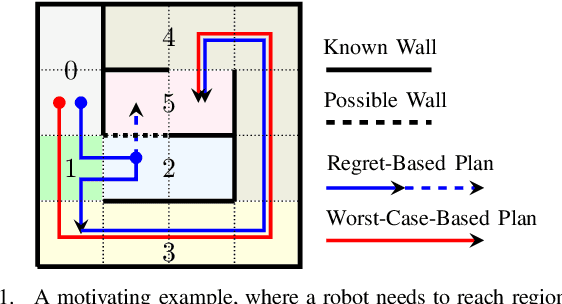
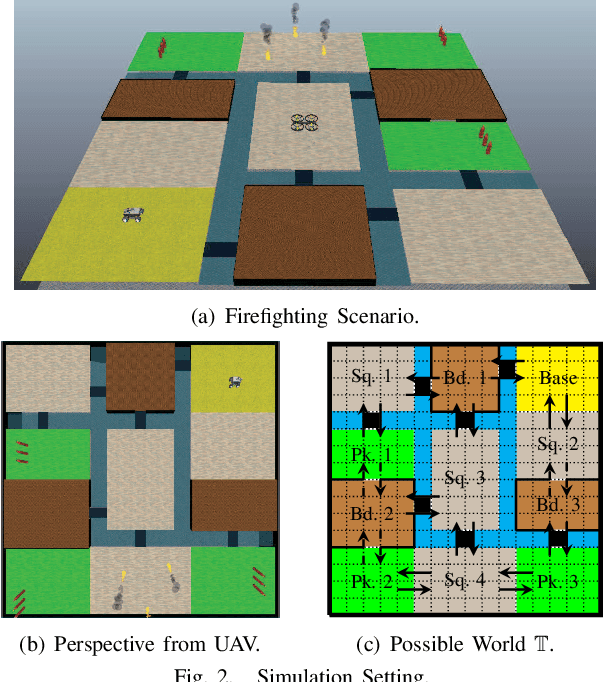
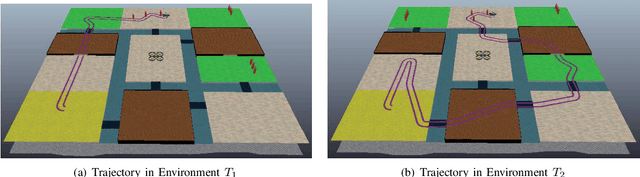
In this paper, we investigate the optimal robot path planning problem for high-level specifications described by co-safe linear temporal logic (LTL) formulae. We consider the scenario where the map geometry of the workspace is partially-known. Specifically, we assume that there are some unknown regions, for which the robot does not know their successor regions a priori unless it reaches these regions physically. In contrast to the standard game-based approach that optimizes the worst-case cost, in the paper, we propose to use regret as a new metric for planning in such a partially-known environment. The regret of a plan under a fixed but unknown environment is the difference between the actual cost incurred and the best-response cost the robot could have achieved if it realizes the actual environment with hindsight. We provide an effective algorithm for finding an optimal plan that satisfies the LTL specification while minimizing its regret. A case study on firefighting robots is provided to illustrate the proposed framework. We argue that the new metric is more suitable for the scenario of partially-known environment since it captures the trade-off between the actual cost spent and the potential benefit one may obtain for exploring an unknown region.