 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual Quaternion SE(3) Synchronization with Recovery Guarantees
Jan 30, 2026Synchronization over the special Euclidean group SE(3) aims to recover absolute poses from noisy pairwise relative transformations and is a core primitive in robotics and 3D vision. Standard approaches often require multi-step heuristic procedures to recover valid poses, which are difficult to analyze and typically lack theoretical guarantees. This paper adopts a dual quaternion representation and formulates SE(3) synchronization directly over the unit dual quaternion. A two-stage algorithm is developed: A spectral initializer computed via the power method on a Hermitian dual quaternion measurement matrix, followed by a dual quaternion generalized power method (DQGPM) that enforces feasibility through per-iteration projection. The estimation error bounds are established for spectral estimators, and DQGPM is shown to admit a finite-iteration error bound and achieves linear error contraction up to an explicit noise-dependent threshold. Experiments on synthetic benchmarks and real-world multi-scan point-set registration demonstrate that the proposed pipeline improves both accuracy and efficiency over representative matrix-based methods.
How to Understand "Support"? An Implicit-enhanced Causal Inference Approach for Weakly-supervised Phrase Grounding
Mar 04, 2024



Weakly-supervised Phrase Grounding (WPG) is an emerging task of inferring the fine-grained phrase-region matching, while merely leveraging the coarse-grained sentence-image pairs for training. However, existing studies on WPG largely ignore the implicit phrase-region matching relations, which are crucial for evaluating the capability of models in understanding the deep multimodal semantics. To this end, this paper proposes an Implicit-Enhanced Causal Inference (IECI) approach to address the challenges of modeling the implicit relations and highlighting them beyond the explicit. Specifically, this approach leverages both the intervention and counterfactual techniques to tackle the above two challenges respectively. Furthermore, a high-quality implicit-enhanced dataset is annotated to evaluate IECI and detailed evaluations show the great advantages of IECI over the state-of-the-art baselines. Particularly, we observe an interesting finding that IECI outperforms the advanced multimodal LLMs by a large margin on this implicit-enhanced dataset, which may facilitate more research to evaluate the multimodal LLMs in this direction.
To Explore or Not to Explore: Regret-Based LTL Planning in Partially-Known Environments
Apr 01, 2022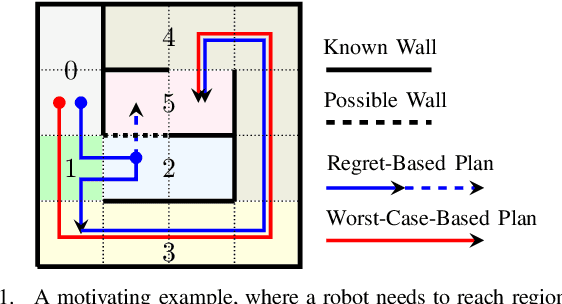
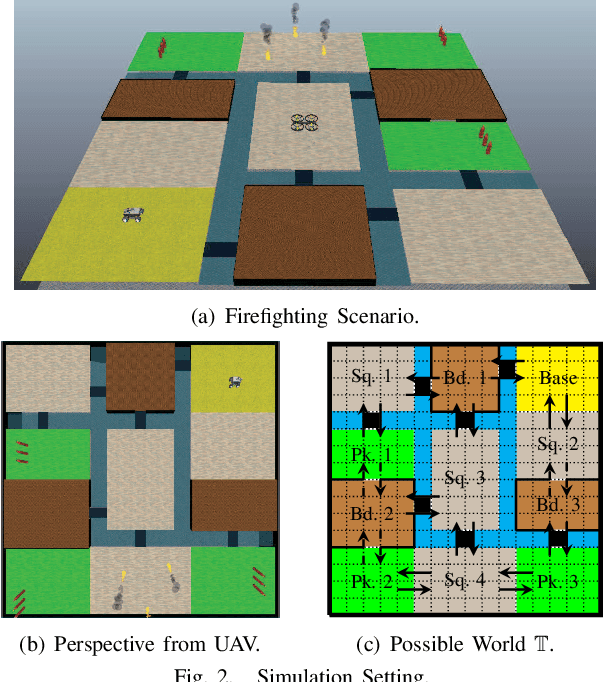
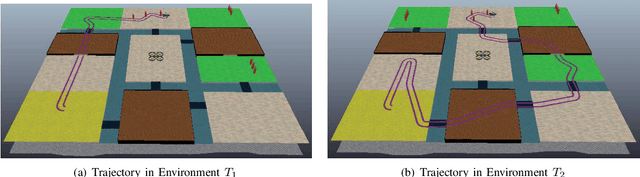
In this paper, we investigate the optimal robot path planning problem for high-level specifications described by co-safe linear temporal logic (LTL) formulae. We consider the scenario where the map geometry of the workspace is partially-known. Specifically, we assume that there are some unknown regions, for which the robot does not know their successor regions a priori unless it reaches these regions physically. In contrast to the standard game-based approach that optimizes the worst-case cost, in the paper, we propose to use regret as a new metric for planning in such a partially-known environment. The regret of a plan under a fixed but unknown environment is the difference between the actual cost incurred and the best-response cost the robot could have achieved if it realizes the actual environment with hindsight. We provide an effective algorithm for finding an optimal plan that satisfies the LTL specification while minimizing its regret. A case study on firefighting robots is provided to illustrate the proposed framework. We argue that the new metric is more suitable for the scenario of partially-known environment since it captures the trade-off between the actual cost spent and the potential benefit one may obtain for exploring an unknown region.