 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAstroMind: A High-Fidelity Benchmark for Spacecraft Behavior Reasoning Based on Large Language Models
May 23, 2026Understanding why a spacecraft maneuvers -- rather than simply that it did -- is an increasingly important problem for space domain awareness as Earth orbits grow crowded and contested. Current analysis pipelines are built for detection: they are good at picking up that something happened, less good at reasoning about what it means. AstroMind is a physics-grounded benchmark designed to close that gap. It draws on high-fidelity astrodynamics simulations and real observational constraints, converting them into verifiable reasoning problems across three task types: intent inference, maneuver parameter estimation, and threat assessment. Each scenario includes realistic sensing noise and multi-source textual intelligence at varying reliability levels. Evaluation metrics capture both semantic correctness and quantitative consistency under physical constraints. Benchmarking a suite of open-weight models shows no single model dominates every axis: Qwen3 (32B) leads on intent inference accuracy; QwQ (32B) leads on threat assessment and achieves the lowest median relative error on parsed items; GPT-OSS (20B) produces the strongest judged reasoning quality and extracts the most scalar values for parameter estimation (136 of 241 parsed items). Training data composition and reasoning style matter as much as model size. Structured reasoning prompts help consistently across tested 8B models, with larger gains for those that can already track physical constraints. AstroMind gives the field a shared test for a problem where getting the physics right and reading the tactical situation correctly are both required -- neither is sufficient on its own.
SpaceSeg: A High-Precision Intelligent Perception Segmentation Method for Multi-Spacecraft On-Orbit Targets
Mar 14, 2025



With the continuous advancement of human exploration into deep space, intelligent perception and high-precision segmentation technology for on-orbit multi-spacecraft targets have become critical factors for ensuring the success of modern space missions. However, the complex deep space environment, diverse imaging conditions, and high variability in spacecraft morphology pose significant challenges to traditional segmentation methods. This paper proposes SpaceSeg, an innovative vision foundation model-based segmentation framework with four core technical innovations: First, the Multi-Scale Hierarchical Attention Refinement Decoder (MSHARD) achieves high-precision feature decoding through cross-resolution feature fusion via hierarchical attention. Second, the Multi-spacecraft Connected Component Analysis (MS-CCA) effectively resolves topological structure confusion in dense targets. Third, the Spatial Domain Adaptation Transform framework (SDAT) eliminates cross-domain disparities and resist spatial sensor perturbations through composite enhancement strategies. Finally, a custom Multi-Spacecraft Segmentation Task Loss Function is created to significantly improve segmentation robustness in deep space scenarios. To support algorithm validation, we construct the first multi-scale on-orbit multi-spacecraft semantic segmentation dataset SpaceES, which covers four types of spatial backgrounds and 17 typical spacecraft targets. In testing, SpaceSeg achieves state-of-the-art performance with 89.87$\%$ mIoU and 99.98$\%$ mAcc, surpassing existing best methods by 5.71 percentage points. The dataset and code are open-sourced at https://github.com/Akibaru/SpaceSeg to provide critical technical support for next-generation space situational awareness systems.
A reconfigurable multiple-format coherent-dual-band signal generator based on a single optoelectronic oscillation cavity
Aug 06, 2023An optoelectronic oscillation method with reconfigurable multiple formats for simultaneous generation of coherent dual-band signals is proposed and experimentally demonstrated. By introducing a compatible filtering mechanism based on stimulated Brillouin scattering (SBS) effect into a typical Phase-shifted grating Bragg fiber (PS-FBG) notch filtering cavity, dual mode-selection mechanisms which have independent frequency and time tuning mechanism can be constructed. By regulating three controllers, the proposed scheme can work in different states, named mode 1, mode 2 and mode 3. At mode 1 state, a dual single-frequency hopping signals is achieved with 50 ns hopping speed and flexible central frequency and pulse duration ratio. The mode 2 state is realized by applying the Fourier domain mode-locked (FDML) technology into the proposed optoelectrical oscillator, in which dual coherent pulsed single-frequency signal and broadband signal is generated simultaneously. The adjustability of the time duration of the single-frequency signal and the bandwidth of the broadband signal are shown and discussed. The mode 3 state is a dual broadband signal generator which is realized by injecting a triangular wave into the signal laser. The detection performance of the generated broadband signals has also been evaluated by the pulse compression and the phase noise figure. The proposed method may provide a multifunctional radar system signal generator based on the simply external controllers, which can realize low-phase-noise or multifunctional detection with high resolution imaging ability, especially in a complex interference environment.
Model Predictive Manipulation of Compliant Objects with Multi-Objective Optimizer and Adversarial Network for Occlusion Compensation
May 20, 2022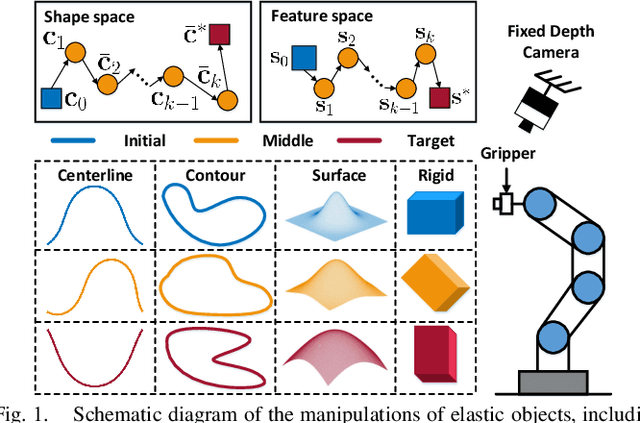
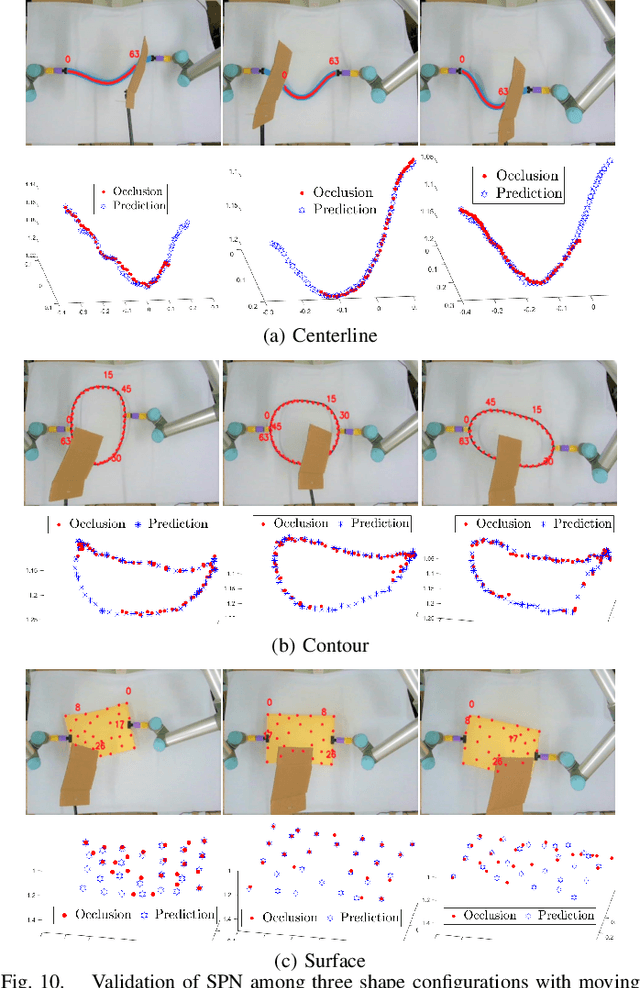
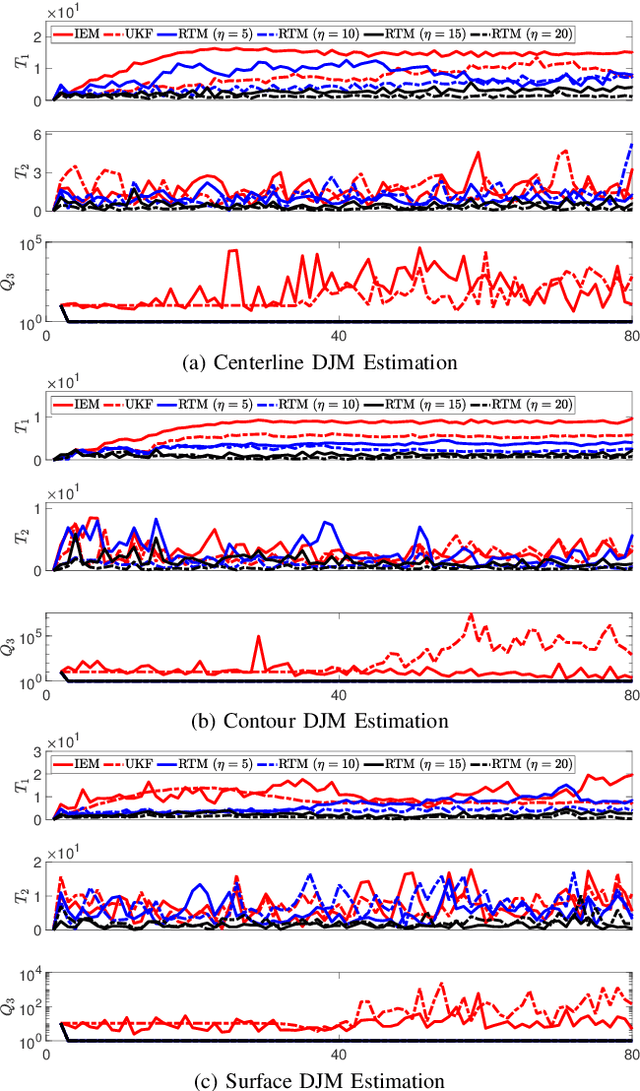
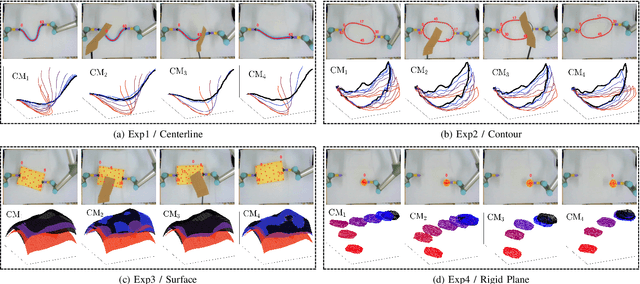
The robotic manipulation of compliant objects is currently one of the most active problems in robotics due to its potential to automate many important applications. Despite the progress achieved by the robotics community in recent years, the 3D shaping of these types of materials remains an open research problem. In this paper, we propose a new vision-based controller to automatically regulate the shape of compliant objects with robotic arms. Our method uses an efficient online surface/curve fitting algorithm that quantifies the object's geometry with a compact vector of features; This feedback-like vector enables to establish an explicit shape servo-loop. To coordinate the motion of the robot with the computed shape features, we propose a receding-time estimator that approximates the system's sensorimotor model while satisfying various performance criteria. A deep adversarial network is developed to robustly compensate for visual occlusions in the camera's field of view, which enables to guide the shaping task even with partial observations of the object. Model predictive control is utilized to compute the robot's shaping motions subject to workspace and saturation constraints. A detailed experimental study is presented to validate the effectiveness of the proposed control framework.
One-Step Two-Critic Deep Reinforcement Learning for Inverter-based Volt-Var Control in Active Distribution Networks
Mar 30, 2022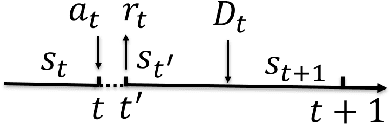
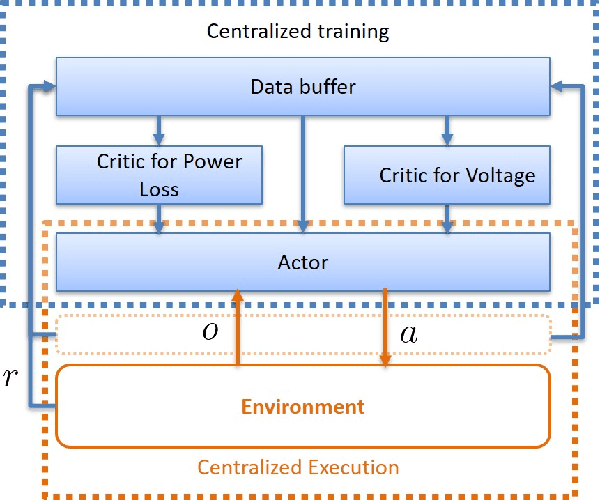
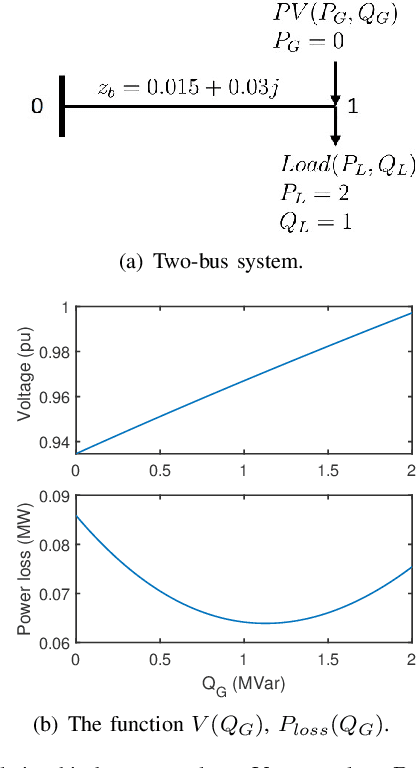
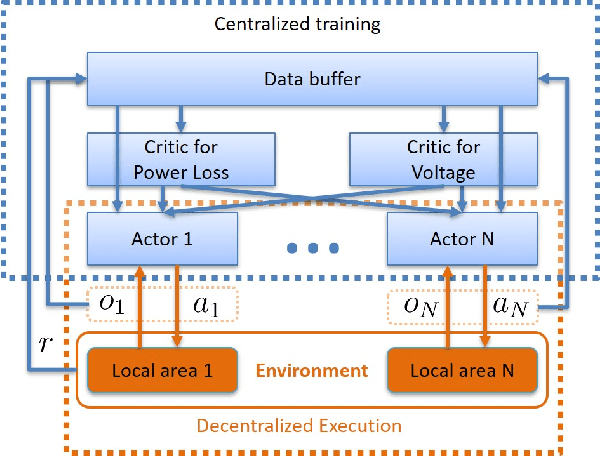
A one-step two-critic deep reinforcement learning (OSTC-DRL) approach for inverter-based volt-var control (IB-VVC) in active distribution networks is proposed in this paper. Firstly, considering IB-VVC can be formulated as a single-period optimization problem, we formulate the IB-VVC as a one-step Markov decision process rather than the standard Markov decision process, which simplifies the DRL learning task. Then we design the one-step actor-critic DRL scheme which is a simplified version of recent DRL algorithms, and it avoids the issue of Q value overestimation successfully. Furthermore, considering two objectives of VVC: minimizing power loss and eliminating voltage violation, we utilize two critics to approximate the rewards of two objectives separately. It simplifies the approximation tasks of each critic, and avoids the interaction effect between two objectives in the learning process of critic. The OSTC-DRL approach integrates the one-step actor-critic DRL scheme and the two-critic technology. Based on the OSTC-DRL, we design two centralized DRL algorithms. Further, we extend the OSTC-DRL to multi-agent OSTC-DRL for decentralized IB-VVC and design two multi-agent DRL algorithms. Simulations demonstrate that the proposed OSTC-DRL has a faster convergence rate and a better control performance, and the multi-agent OSTC-DRL works well for decentralized IB-VVC problems.
Off-policy Maximum Entropy Reinforcement Learning : Soft Actor-Critic with Advantage Weighted Mixture Policy(SAC-AWMP)
Feb 07, 2020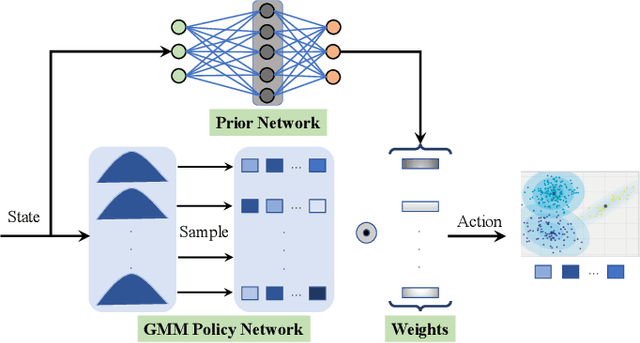
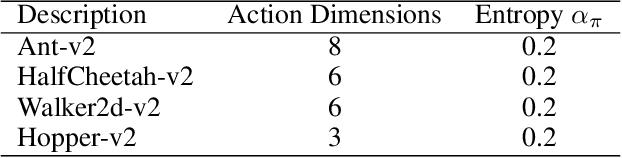
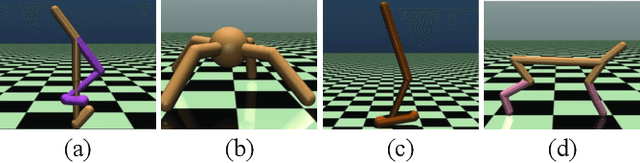
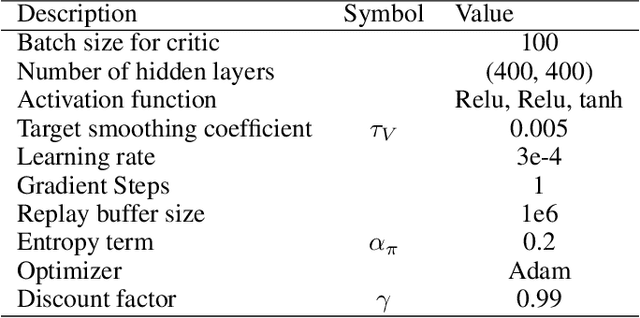
The optimal policy of a reinforcement learning problem is often discontinuous and non-smooth. I.e., for two states with similar representations, their optimal policies can be significantly different. In this case, representing the entire policy with a function approximator (FA) with shared parameters for all states maybe not desirable, as the generalization ability of parameters sharing makes representing discontinuous, non-smooth policies difficult. A common way to solve this problem, known as Mixture-of-Experts, is to represent the policy as the weighted sum of multiple components, where different components perform well on different parts of the state space. Following this idea and inspired by a recent work called advantage-weighted information maximization, we propose to learn for each state weights of these components, so that they entail the information of the state itself and also the preferred action learned so far for the state. The action preference is characterized via the advantage function. In this case, the weight of each component would only be large for certain groups of states whose representations are similar and preferred action representations are also similar. Therefore each component is easy to be represented. We call a policy parameterized in this way an Advantage Weighted Mixture Policy (AWMP) and apply this idea to improve soft-actor-critic (SAC), one of the most competitive continuous control algorithm. Experimental results demonstrate that SAC with AWMP clearly outperforms SAC in four commonly used continuous control tasks and achieve stable performance across different random seeds.
Complex Transformer: A Framework for Modeling Complex-Valued Sequence
Oct 22, 2019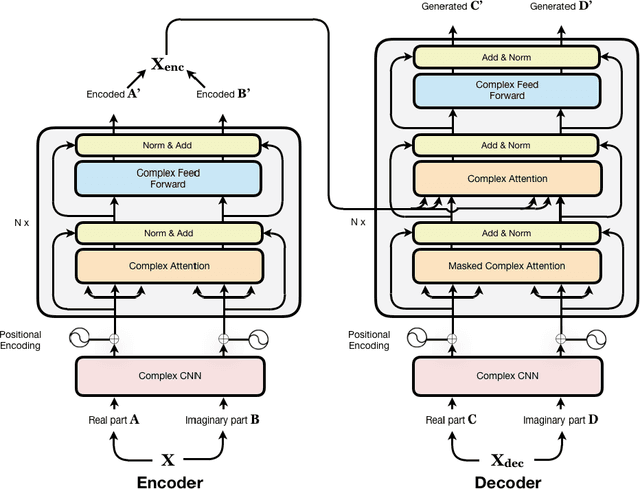
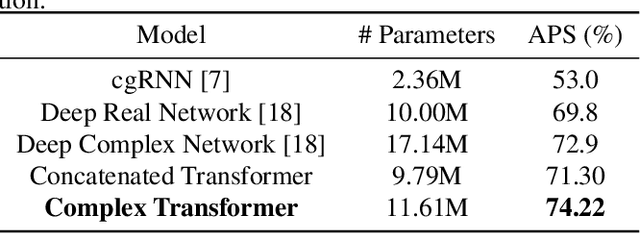
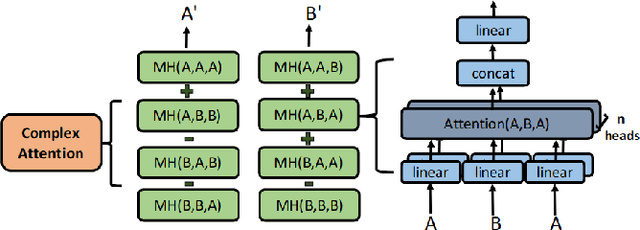
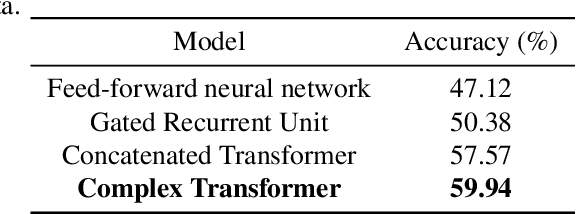
While deep learning has received a surge of interest in a variety of fields in recent years, major deep learning models barely use complex numbers. However, speech, signal and audio data are naturally complex-valued after Fourier Transform, and studies have shown a potentially richer representation of complex nets. In this paper, we propose a Complex Transformer, which incorporates the transformer model as a backbone for sequence modeling; we also develop attention and encoder-decoder network operating for complex input. The model achieves state-of-the-art performance on the MusicNet dataset and an In-phase Quadrature (IQ) signal dataset.