 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEM-Vid: Training-Free Entity-Centric Memory for Efficient and Consistent Multi-Shot Video Generation
May 22, 2026Multi-shot video generation requires maintaining a consistent appearance of recurring entities across shots while remaining faithful to shot-specific text prompts. Recent autoregressive methods reuse previously generated frames as memory. However, full-frame storage entangles persistent entity information with transient scene context, leading to irrelevant information leakage and high computational cost. We propose an entity-centric memory in the form of an entity-indexed bank of latent patches. We introduce sparse token conditioning compatible with pretrained models, restricting self-attention to entity-relevant tokens and reducing computational cost. To support this, we introduce a structured multi-shot script format. We additionally propose a budgeted memory update strategy to maintain a compact, evolving memory. Finally, we equip the entity representation with a noise-injection mechanism that enables fine-grained appearance control, preventing leakage of irrelevant information. Our method improves prompt adherence and efficiency while preserving subject consistency.
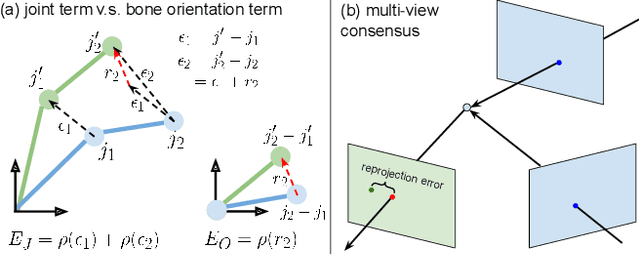
RHOBIN Challenge: Reconstruction of Human Object Interaction
Jan 07, 2024Modeling the interaction between humans and objects has been an emerging research direction in recent years. Capturing human-object interaction is however a very challenging task due to heavy occlusion and complex dynamics, which requires understanding not only 3D human pose, and object pose but also the interaction between them. Reconstruction of 3D humans and objects has been two separate research fields in computer vision for a long time. We hence proposed the first RHOBIN challenge: reconstruction of human-object interactions in conjunction with the RHOBIN workshop. It was aimed at bringing the research communities of human and object reconstruction as well as interaction modeling together to discuss techniques and exchange ideas. Our challenge consists of three tracks of 3D reconstruction from monocular RGB images with a focus on dealing with challenging interaction scenarios. Our challenge attracted more than 100 participants with more than 300 submissions, indicating the broad interest in the research communities. This paper describes the settings of our challenge and discusses the winning methods of each track in more detail. We observe that the human reconstruction task is becoming mature even under heavy occlusion settings while object pose estimation and joint reconstruction remain challenging tasks. With the growing interest in interaction modeling, we hope this report can provide useful insights and foster future research in this direction. Our workshop website can be found at \href{https://rhobin-challenge.github.io/}{https://rhobin-challenge.github.io/}.
3D Human Pose Estimation via Intuitive Physics
Apr 06, 2023



Estimating 3D humans from images often produces implausible bodies that lean, float, or penetrate the floor. Such methods ignore the fact that bodies are typically supported by the scene. A physics engine can be used to enforce physical plausibility, but these are not differentiable, rely on unrealistic proxy bodies, and are difficult to integrate into existing optimization and learning frameworks. In contrast, we exploit novel intuitive-physics (IP) terms that can be inferred from a 3D SMPL body interacting with the scene. Inspired by biomechanics, we infer the pressure heatmap on the body, the Center of Pressure (CoP) from the heatmap, and the SMPL body's Center of Mass (CoM). With these, we develop IPMAN, to estimate a 3D body from a color image in a "stable" configuration by encouraging plausible floor contact and overlapping CoP and CoM. Our IP terms are intuitive, easy to implement, fast to compute, differentiable, and can be integrated into existing optimization and regression methods. We evaluate IPMAN on standard datasets and MoYo, a new dataset with synchronized multi-view images, ground-truth 3D bodies with complex poses, body-floor contact, CoM and pressure. IPMAN produces more plausible results than the state of the art, improving accuracy for static poses, while not hurting dynamic ones. Code and data are available for research at https://ipman.is.tue.mpg.de.
MIME: Human-Aware 3D Scene Generation
Dec 08, 2022
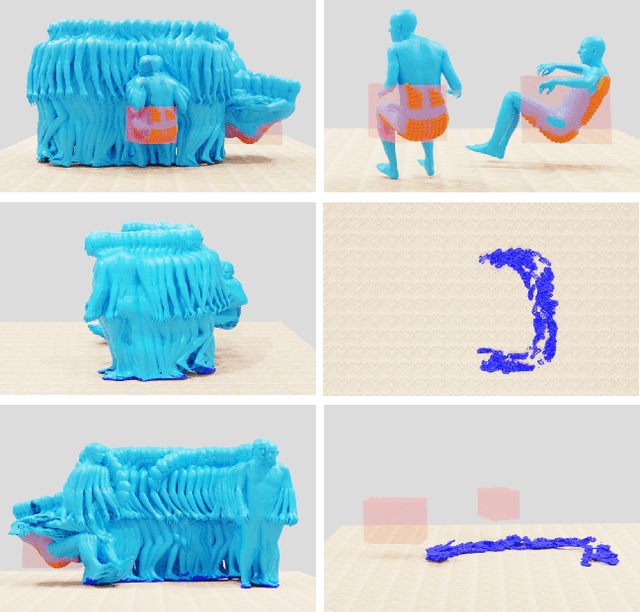
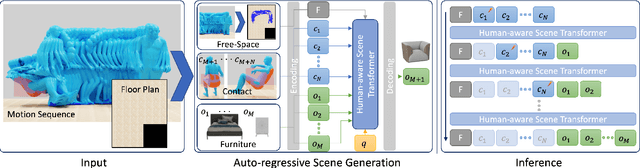
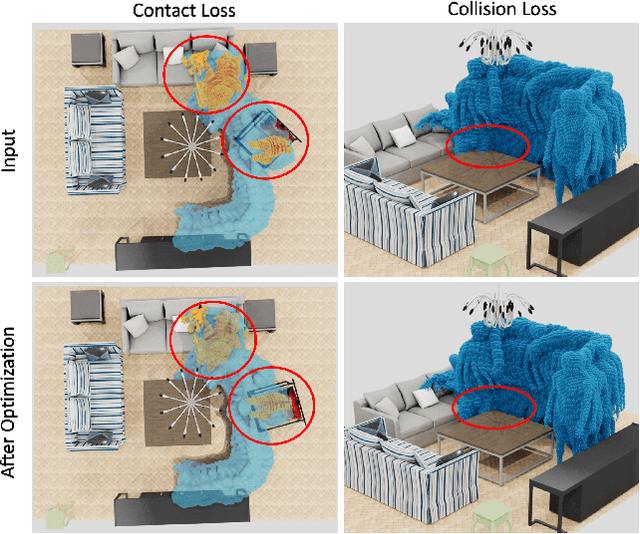
Generating realistic 3D worlds occupied by moving humans has many applications in games, architecture, and synthetic data creation. But generating such scenes is expensive and labor intensive. Recent work generates human poses and motions given a 3D scene. Here, we take the opposite approach and generate 3D indoor scenes given 3D human motion. Such motions can come from archival motion capture or from IMU sensors worn on the body, effectively turning human movement in a "scanner" of the 3D world. Intuitively, human movement indicates the free-space in a room and human contact indicates surfaces or objects that support activities such as sitting, lying or touching. We propose MIME (Mining Interaction and Movement to infer 3D Environments), which is a generative model of indoor scenes that produces furniture layouts that are consistent with the human movement. MIME uses an auto-regressive transformer architecture that takes the already generated objects in the scene as well as the human motion as input, and outputs the next plausible object. To train MIME, we build a dataset by populating the 3D FRONT scene dataset with 3D humans. Our experiments show that MIME produces more diverse and plausible 3D scenes than a recent generative scene method that does not know about human movement. Code and data will be available for research at https://mime.is.tue.mpg.de.
Capturing and Inferring Dense Full-Body Human-Scene Contact
Jun 20, 2022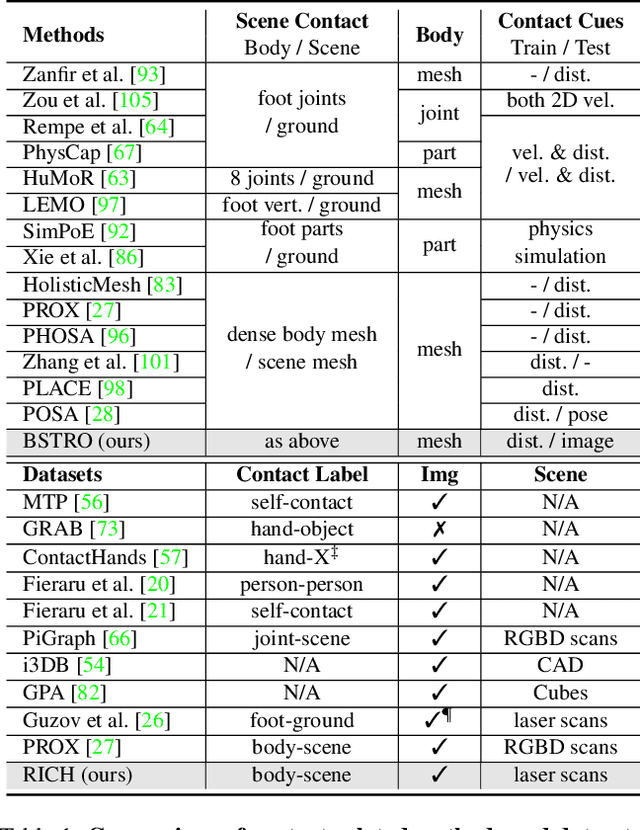
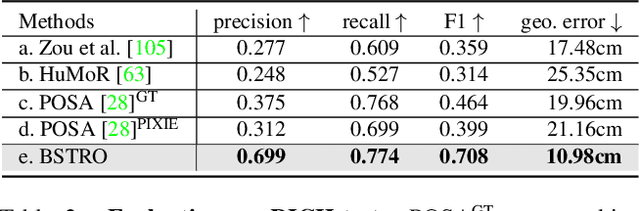
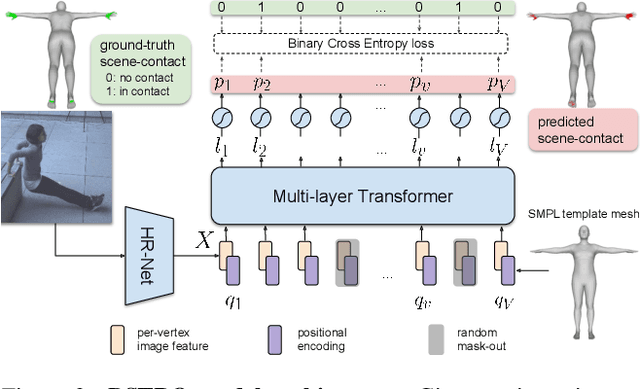
Inferring human-scene contact (HSC) is the first step toward understanding how humans interact with their surroundings. While detecting 2D human-object interaction (HOI) and reconstructing 3D human pose and shape (HPS) have enjoyed significant progress, reasoning about 3D human-scene contact from a single image is still challenging. Existing HSC detection methods consider only a few types of predefined contact, often reduce body and scene to a small number of primitives, and even overlook image evidence. To predict human-scene contact from a single image, we address the limitations above from both data and algorithmic perspectives. We capture a new dataset called RICH for "Real scenes, Interaction, Contact and Humans." RICH contains multiview outdoor/indoor video sequences at 4K resolution, ground-truth 3D human bodies captured using markerless motion capture, 3D body scans, and high resolution 3D scene scans. A key feature of RICH is that it also contains accurate vertex-level contact labels on the body. Using RICH, we train a network that predicts dense body-scene contacts from a single RGB image. Our key insight is that regions in contact are always occluded so the network needs the ability to explore the whole image for evidence. We use a transformer to learn such non-local relationships and propose a new Body-Scene contact TRansfOrmer (BSTRO). Very few methods explore 3D contact; those that do focus on the feet only, detect foot contact as a post-processing step, or infer contact from body pose without looking at the scene. To our knowledge, BSTRO is the first method to directly estimate 3D body-scene contact from a single image. We demonstrate that BSTRO significantly outperforms the prior art. The code and dataset are available at https://rich.is.tue.mpg.de.
Accurate 3D Body Shape Regression using Metric and Semantic Attributes
Jun 14, 2022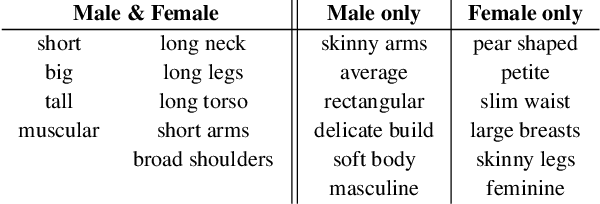
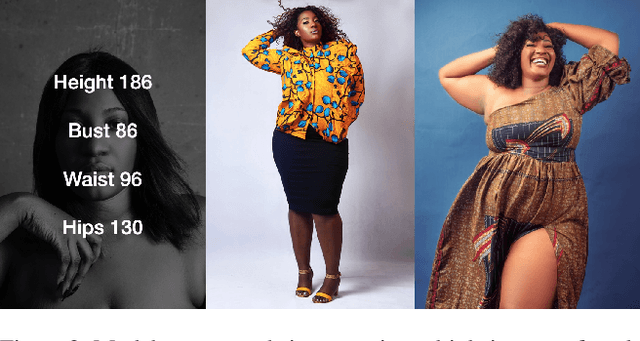
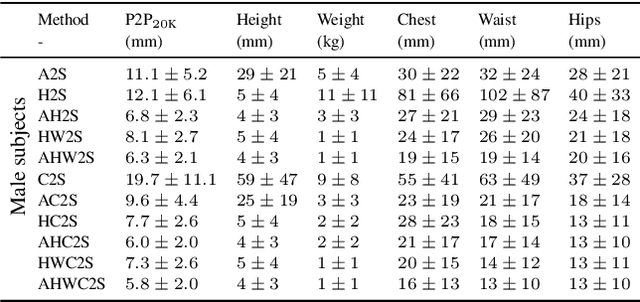

While methods that regress 3D human meshes from images have progressed rapidly, the estimated body shapes often do not capture the true human shape. This is problematic since, for many applications, accurate body shape is as important as pose. The key reason that body shape accuracy lags pose accuracy is the lack of data. While humans can label 2D joints, and these constrain 3D pose, it is not so easy to "label" 3D body shape. Since paired data with images and 3D body shape are rare, we exploit two sources of information: (1) we collect internet images of diverse "fashion" models together with a small set of anthropometric measurements; (2) we collect linguistic shape attributes for a wide range of 3D body meshes and the model images. Taken together, these datasets provide sufficient constraints to infer dense 3D shape. We exploit the anthropometric measurements and linguistic shape attributes in several novel ways to train a neural network, called SHAPY, that regresses 3D human pose and shape from an RGB image. We evaluate SHAPY on public benchmarks, but note that they either lack significant body shape variation, ground-truth shape, or clothing variation. Thus, we collect a new dataset for evaluating 3D human shape estimation, called HBW, containing photos of "Human Bodies in the Wild" for which we have ground-truth 3D body scans. On this new benchmark, SHAPY significantly outperforms state-of-the-art methods on the task of 3D body shape estimation. This is the first demonstration that 3D body shape regression from images can be trained from easy-to-obtain anthropometric measurements and linguistic shape attributes. Our model and data are available at: shapy.is.tue.mpg.de
* First two authors contributed equally
Human-Aware Object Placement for Visual Environment Reconstruction
Mar 28, 2022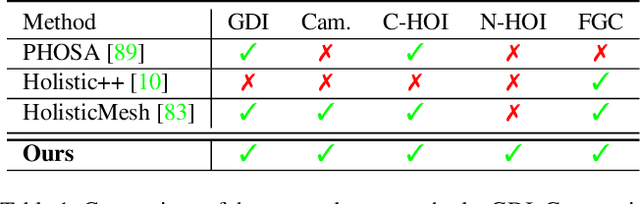
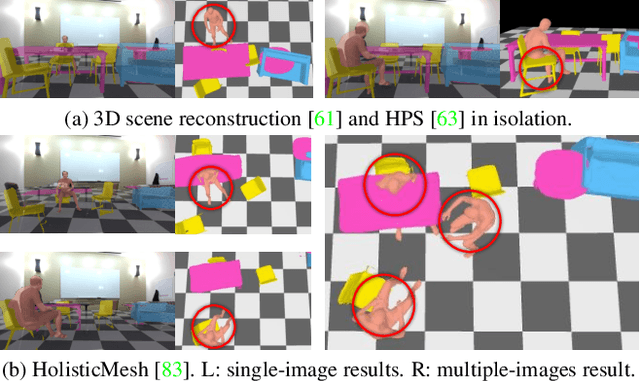
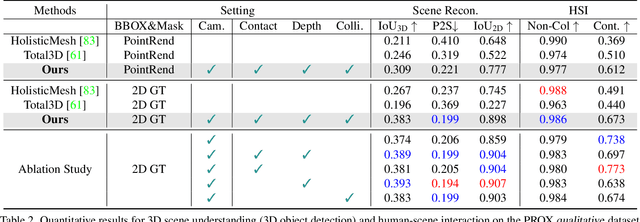
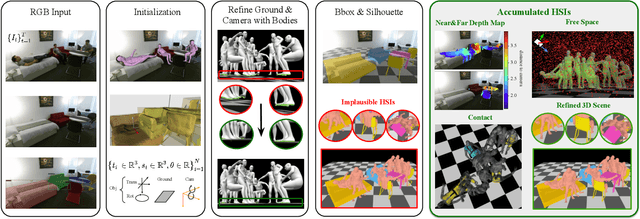
Humans are in constant contact with the world as they move through it and interact with it. This contact is a vital source of information for understanding 3D humans, 3D scenes, and the interactions between them. In fact, we demonstrate that these human-scene interactions (HSIs) can be leveraged to improve the 3D reconstruction of a scene from a monocular RGB video. Our key idea is that, as a person moves through a scene and interacts with it, we accumulate HSIs across multiple input images, and optimize the 3D scene to reconstruct a consistent, physically plausible and functional 3D scene layout. Our optimization-based approach exploits three types of HSI constraints: (1) humans that move in a scene are occluded or occlude objects, thus, defining the depth ordering of the objects, (2) humans move through free space and do not interpenetrate objects, (3) when humans and objects are in contact, the contact surfaces occupy the same place in space. Using these constraints in an optimization formulation across all observations, we significantly improve the 3D scene layout reconstruction. Furthermore, we show that our scene reconstruction can be used to refine the initial 3D human pose and shape (HPS) estimation. We evaluate the 3D scene layout reconstruction and HPS estimation qualitatively and quantitatively using the PROX and PiGraphs datasets. The code and data are available for research purposes at https://mover.is.tue.mpg.de/.
SPEC: Seeing People in the Wild with an Estimated Camera
Oct 01, 2021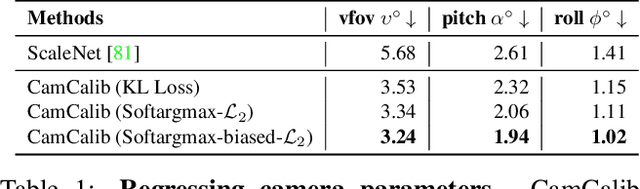
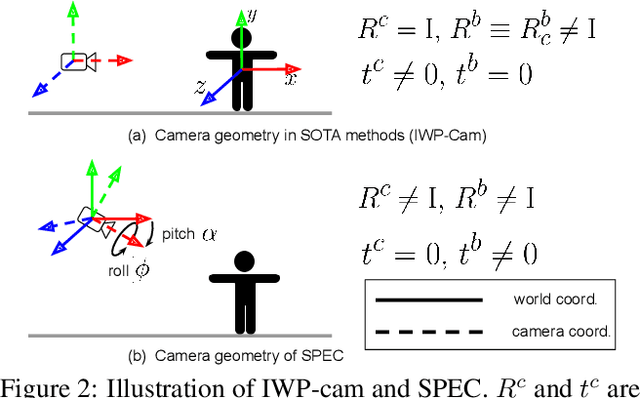
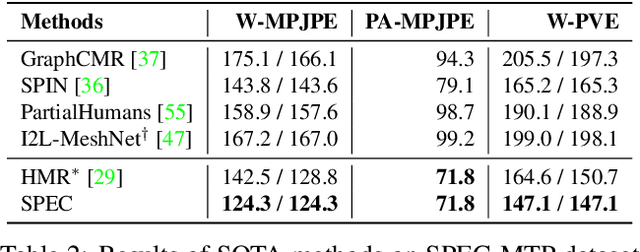
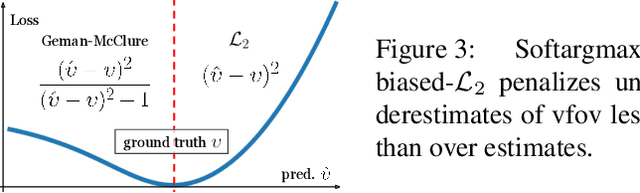
Due to the lack of camera parameter information for in-the-wild images, existing 3D human pose and shape (HPS) estimation methods make several simplifying assumptions: weak-perspective projection, large constant focal length, and zero camera rotation. These assumptions often do not hold and we show, quantitatively and qualitatively, that they cause errors in the reconstructed 3D shape and pose. To address this, we introduce SPEC, the first in-the-wild 3D HPS method that estimates the perspective camera from a single image and employs this to reconstruct 3D human bodies more accurately. %regress 3D human bodies. First, we train a neural network to estimate the field of view, camera pitch, and roll given an input image. We employ novel losses that improve the calibration accuracy over previous work. We then train a novel network that concatenates the camera calibration to the image features and uses these together to regress 3D body shape and pose. SPEC is more accurate than the prior art on the standard benchmark (3DPW) as well as two new datasets with more challenging camera views and varying focal lengths. Specifically, we create a new photorealistic synthetic dataset (SPEC-SYN) with ground truth 3D bodies and a novel in-the-wild dataset (SPEC-MTP) with calibration and high-quality reference bodies. Both qualitative and quantitative analysis confirm that knowing camera parameters during inference regresses better human bodies. Code and datasets are available for research purposes at https://spec.is.tue.mpg.de.
AGORA: Avatars in Geography Optimized for Regression Analysis
Apr 29, 2021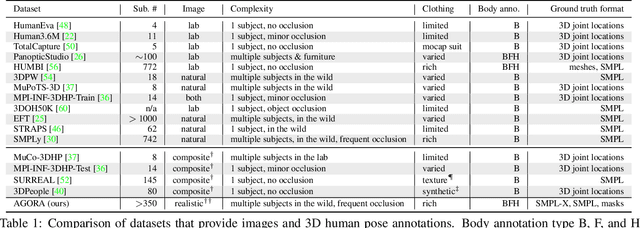
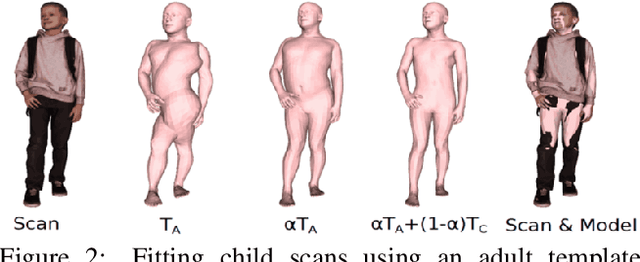
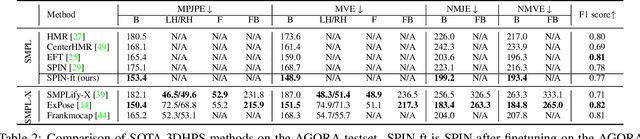
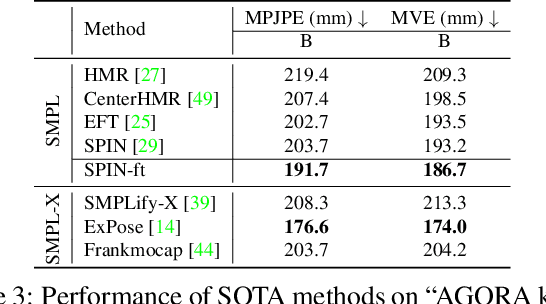
While the accuracy of 3D human pose estimation from images has steadily improved on benchmark datasets, the best methods still fail in many real-world scenarios. This suggests that there is a domain gap between current datasets and common scenes containing people. To obtain ground-truth 3D pose, current datasets limit the complexity of clothing, environmental conditions, number of subjects, and occlusion. Moreover, current datasets evaluate sparse 3D joint locations corresponding to the major joints of the body, ignoring the hand pose and the face shape. To evaluate the current state-of-the-art methods on more challenging images, and to drive the field to address new problems, we introduce AGORA, a synthetic dataset with high realism and highly accurate ground truth. Here we use 4240 commercially-available, high-quality, textured human scans in diverse poses and natural clothing; this includes 257 scans of children. We create reference 3D poses and body shapes by fitting the SMPL-X body model (with face and hands) to the 3D scans, taking into account clothing. We create around 14K training and 3K test images by rendering between 5 and 15 people per image using either image-based lighting or rendered 3D environments, taking care to make the images physically plausible and photoreal. In total, AGORA consists of 173K individual person crops. We evaluate existing state-of-the-art methods for 3D human pose estimation on this dataset and find that most methods perform poorly on images of children. Hence, we extend the SMPL-X model to better capture the shape of children. Additionally, we fine-tune methods on AGORA and show improved performance on both AGORA and 3DPW, confirming the realism of the dataset. We provide all the registered 3D reference training data, rendered images, and a web-based evaluation site at https://agora.is.tue.mpg.de/.
PARE: Part Attention Regressor for 3D Human Body Estimation
Apr 17, 2021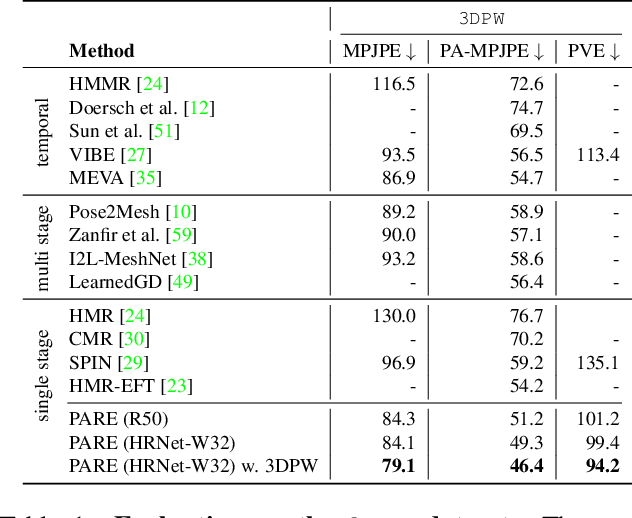
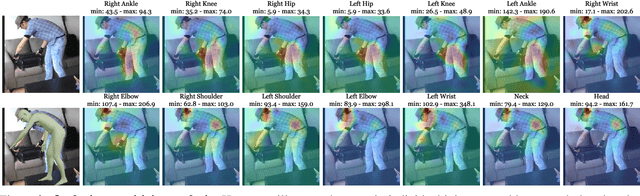
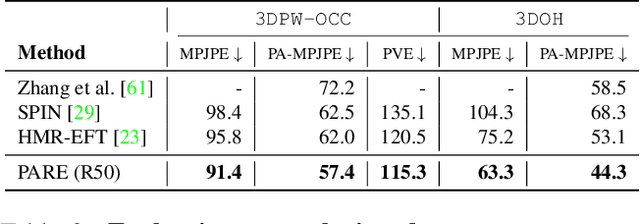
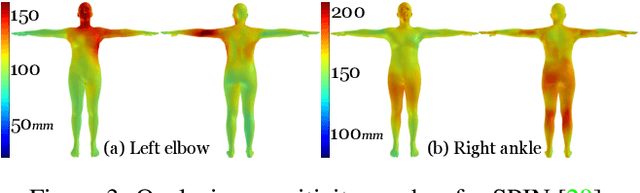
Despite significant progress, we show that state of the art 3D human pose and shape estimation methods remain sensitive to partial occlusion and can produce dramatically wrong predictions although much of the body is observable. To address this, we introduce a soft attention mechanism, called the Part Attention REgressor (PARE), that learns to predict body-part-guided attention masks. We observe that state-of-the-art methods rely on global feature representations, making them sensitive to even small occlusions. In contrast, PARE's part-guided attention mechanism overcomes these issues by exploiting information about the visibility of individual body parts while leveraging information from neighboring body-parts to predict occluded parts. We show qualitatively that PARE learns sensible attention masks, and quantitative evaluation confirms that PARE achieves more accurate and robust reconstruction results than existing approaches on both occlusion-specific and standard benchmarks. Code will be available for research purposes at https://pare.is.tue.mpg.de/.