 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Predictor-Corrector: Solving Homotopy Problems with Reinforcement Learning
Feb 03, 2026The Homotopy paradigm, a general principle for solving challenging problems, appears across diverse domains such as robust optimization, global optimization, polynomial root-finding, and sampling. Practical solvers for these problems typically follow a predictor-corrector (PC) structure, but rely on hand-crafted heuristics for step sizes and iteration termination, which are often suboptimal and task-specific. To address this, we unify these problems under a single framework, which enables the design of a general neural solver. Building on this unified view, we propose Neural Predictor-Corrector (NPC), which replaces hand-crafted heuristics with automatically learned policies. NPC formulates policy selection as a sequential decision-making problem and leverages reinforcement learning to automatically discover efficient strategies. To further enhance generalization, we introduce an amortized training mechanism, enabling one-time offline training for a class of problems and efficient online inference on new instances. Experiments on four representative homotopy problems demonstrate that our method generalizes effectively to unseen instances. It consistently outperforms classical and specialized baselines in efficiency while demonstrating superior stability across tasks, highlighting the value of unifying homotopy methods into a single neural framework.
E-MoFlow: Learning Egomotion and Optical Flow from Event Data via Implicit Regularization
Oct 14, 2025



The estimation of optical flow and 6-DoF ego-motion, two fundamental tasks in 3D vision, has typically been addressed independently. For neuromorphic vision (e.g., event cameras), however, the lack of robust data association makes solving the two problems separately an ill-posed challenge, especially in the absence of supervision via ground truth. Existing works mitigate this ill-posedness by either enforcing the smoothness of the flow field via an explicit variational regularizer or leveraging explicit structure-and-motion priors in the parametrization to improve event alignment. The former notably introduces bias in results and computational overhead, while the latter, which parametrizes the optical flow in terms of the scene depth and the camera motion, often converges to suboptimal local minima. To address these issues, we propose an unsupervised framework that jointly optimizes egomotion and optical flow via implicit spatial-temporal and geometric regularization. First, by modeling camera's egomotion as a continuous spline and optical flow as an implicit neural representation, our method inherently embeds spatial-temporal coherence through inductive biases. Second, we incorporate structure-and-motion priors through differential geometric constraints, bypassing explicit depth estimation while maintaining rigorous geometric consistency. As a result, our framework (called E-MoFlow) unifies egomotion and optical flow estimation via implicit regularization under a fully unsupervised paradigm. Experiments demonstrate its versatility to general 6-DoF motion scenarios, achieving state-of-the-art performance among unsupervised methods and competitive even with supervised approaches.
VARD: Efficient and Dense Fine-Tuning for Diffusion Models with Value-based RL
May 21, 2025



Diffusion models have emerged as powerful generative tools across various domains, yet tailoring pre-trained models to exhibit specific desirable properties remains challenging. While reinforcement learning (RL) offers a promising solution,current methods struggle to simultaneously achieve stable, efficient fine-tuning and support non-differentiable rewards. Furthermore, their reliance on sparse rewards provides inadequate supervision during intermediate steps, often resulting in suboptimal generation quality. To address these limitations, dense and differentiable signals are required throughout the diffusion process. Hence, we propose VAlue-based Reinforced Diffusion (VARD): a novel approach that first learns a value function predicting expection of rewards from intermediate states, and subsequently uses this value function with KL regularization to provide dense supervision throughout the generation process. Our method maintains proximity to the pretrained model while enabling effective and stable training via backpropagation. Experimental results demonstrate that our approach facilitates better trajectory guidance, improves training efficiency and extends the applicability of RL to diffusion models optimized for complex, non-differentiable reward functions.
Convex Relaxation for Robust Vanishing Point Estimation in Manhattan World
May 07, 2025



Determining the vanishing points (VPs) in a Manhattan world, as a fundamental task in many 3D vision applications, consists of jointly inferring the line-VP association and locating each VP. Existing methods are, however, either sub-optimal solvers or pursuing global optimality at a significant cost of computing time. In contrast to prior works, we introduce convex relaxation techniques to solve this task for the first time. Specifically, we employ a ``soft'' association scheme, realized via a truncated multi-selection error, that allows for joint estimation of VPs' locations and line-VP associations. This approach leads to a primal problem that can be reformulated into a quadratically constrained quadratic programming (QCQP) problem, which is then relaxed into a convex semidefinite programming (SDP) problem. To solve this SDP problem efficiently, we present a globally optimal outlier-robust iterative solver (called \textbf{GlobustVP}), which independently searches for one VP and its associated lines in each iteration, treating other lines as outliers. After each independent update of all VPs, the mutual orthogonality between the three VPs in a Manhattan world is reinforced via local refinement. Extensive experiments on both synthetic and real-world data demonstrate that \textbf{GlobustVP} achieves a favorable balance between efficiency, robustness, and global optimality compared to previous works. The code is publicly available at https://github.com/WU-CVGL/GlobustVP.
EvTTC: An Event Camera Dataset for Time-to-Collision Estimation
Dec 06, 2024Time-to-Collision (TTC) estimation lies in the core of the forward collision warning (FCW) functionality, which is key to all Automatic Emergency Braking (AEB) systems. Although the success of solutions using frame-based cameras (e.g., Mobileye's solutions) has been witnessed in normal situations, some extreme cases, such as the sudden variation in the relative speed of leading vehicles and the sudden appearance of pedestrians, still pose significant risks that cannot be handled. This is due to the inherent imaging principles of frame-based cameras, where the time interval between adjacent exposures introduces considerable system latency to AEB. Event cameras, as a novel bio-inspired sensor, offer ultra-high temporal resolution and can asynchronously report brightness changes at the microsecond level. To explore the potential of event cameras in the above-mentioned challenging cases, we propose EvTTC, which is, to the best of our knowledge, the first multi-sensor dataset focusing on TTC tasks under high-relative-speed scenarios. EvTTC consists of data collected using standard cameras and event cameras, covering various potential collision scenarios in daily driving and involving multiple collision objects. Additionally, LiDAR and GNSS/INS measurements are provided for the calculation of ground-truth TTC. Considering the high cost of testing TTC algorithms on full-scale mobile platforms, we also provide a small-scale TTC testbed for experimental validation and data augmentation. All the data and the design of the testbed are open sourced, and they can serve as a benchmark that will facilitate the development of vision-based TTC techniques.
RSL-BA: Rolling Shutter Line Bundle Adjustment
Aug 10, 2024
The line is a prevalent element in man-made environments, inherently encoding spatial structural information, thus making it a more robust choice for feature representation in practical applications. Despite its apparent advantages, previous rolling shutter bundle adjustment (RSBA) methods have only supported sparse feature points, which lack robustness, particularly in degenerate environments. In this paper, we introduce the first rolling shutter line-based bundle adjustment solution, RSL-BA. Specifically, we initially establish the rolling shutter camera line projection theory utilizing Pl\"ucker line parameterization. Subsequently, we derive a series of reprojection error formulations which are stable and efficient. Finally, we theoretically and experimentally demonstrate that our method can prevent three common degeneracies, one of which is first discovered in this paper. Extensive synthetic and real data experiments demonstrate that our method achieves efficiency and accuracy comparable to existing point-based rolling shutter bundle adjustment solutions.
GlobalPointer: Large-Scale Plane Adjustment with Bi-Convex Relaxation
Jul 19, 2024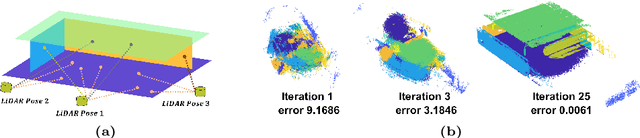
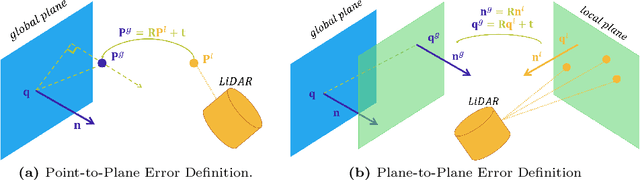
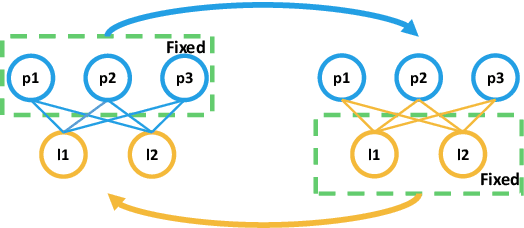
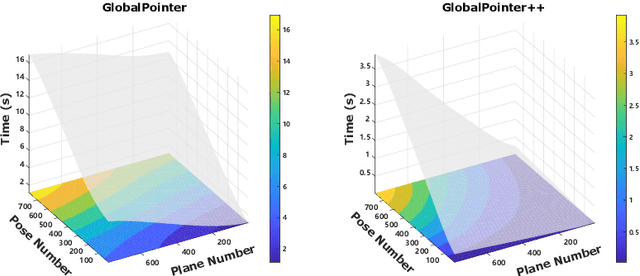
Plane adjustment (PA) is crucial for many 3D applications, involving simultaneous pose estimation and plane recovery. Despite recent advancements, it remains a challenging problem in the realm of multi-view point cloud registration. Current state-of-the-art methods can achieve globally optimal convergence only with good initialization. Furthermore, their high time complexity renders them impractical for large-scale problems. To address these challenges, we first exploit a novel optimization strategy termed \textit{Bi-Convex Relaxation}, which decouples the original problem into two simpler sub-problems, reformulates each sub-problem using a convex relaxation technique, and alternately solves each one until the original problem converges. Building on this strategy, we propose two algorithmic variants for solving the plane adjustment problem, namely \textit{GlobalPointer} and \textit{GlobalPointer++}, based on point-to-plane and plane-to-plane errors, respectively. Extensive experiments on both synthetic and real datasets demonstrate that our method can perform large-scale plane adjustment with linear time complexity, larger convergence region, and robustness to poor initialization, while achieving similar accuracy as prior methods. The code is available at https://github.com/wu-cvgl/GlobalPointer.
Motion and Structure from Event-based Normal Flow
Jul 19, 2024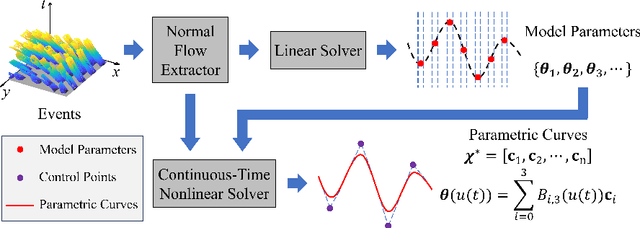
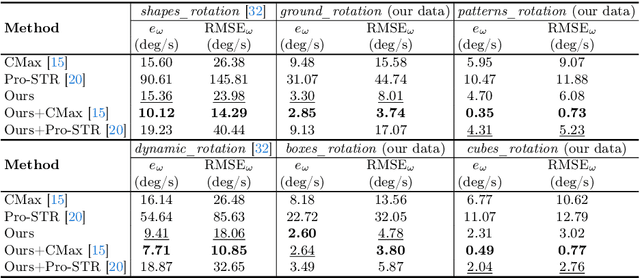


Recovering the camera motion and scene geometry from visual data is a fundamental problem in the field of computer vision. Its success in standard vision is attributed to the maturity of feature extraction, data association and multi-view geometry. The recent emergence of neuromorphic event-based cameras places great demands on approaches that use raw event data as input to solve this fundamental problem.Existing state-of-the-art solutions typically infer implicitly data association by iteratively reversing the event data generation process. However, the nonlinear nature of these methods limits their applicability in real-time tasks, and the constant-motion assumption leads to unstable results under agile motion. To this end, we rethink the problem formulation in a way that aligns better with the differential working principle of event cameras.We show that the event-based normal flow can be used, via the proposed geometric error term, as an alternative to the full flow in solving a family of geometric problems that involve instantaneous first-order kinematics and scene geometry. Furthermore, we develop a fast linear solver and a continuous-time nonlinear solver on top of the proposed geometric error term.Experiments on both synthetic and real data show the superiority of our linear solver in terms of accuracy and efficiency, and indicate its complementary feature as an initialization method for existing nonlinear solvers. Besides, our continuous-time non-linear solver exhibits exceptional capability in accommodating sudden variations in motion since it does not rely on the constant-motion assumption.
Event-Aided Time-to-Collision Estimation for Autonomous Driving
Jul 10, 2024Predicting a potential collision with leading vehicles is an essential functionality of any autonomous/assisted driving system. One bottleneck of existing vision-based solutions is that their updating rate is limited to the frame rate of standard cameras used. In this paper, we present a novel method that estimates the time to collision using a neuromorphic event-based camera, a biologically inspired visual sensor that can sense at exactly the same rate as scene dynamics. The core of the proposed algorithm consists of a two-step approach for efficient and accurate geometric model fitting on event data in a coarse-to-fine manner. The first step is a robust linear solver based on a novel geometric measurement that overcomes the partial observability of event-based normal flow. The second step further refines the resulting model via a spatio-temporal registration process formulated as a nonlinear optimization problem. Experiments on both synthetic and real data demonstrate the effectiveness of the proposed method, outperforming other alternative methods in terms of efficiency and accuracy.
USB-NeRF: Unrolling Shutter Bundle Adjusted Neural Radiance Fields
Oct 05, 2023


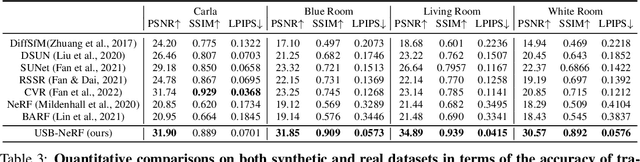
Neural Radiance Fields (NeRF) has received much attention recently due to its impressive capability to represent 3D scene and synthesize novel view images. Existing works usually assume that the input images are captured by a global shutter camera. Thus, rolling shutter (RS) images cannot be trivially applied to an off-the-shelf NeRF algorithm for novel view synthesis. Rolling shutter effect would also affect the accuracy of the camera pose estimation (e.g. via COLMAP), which further prevents the success of NeRF algorithm with RS images. In this paper, we propose Unrolling Shutter Bundle Adjusted Neural Radiance Fields (USB-NeRF). USB-NeRF is able to correct rolling shutter distortions and recover accurate camera motion trajectory simultaneously under the framework of NeRF, by modeling the physical image formation process of a RS camera. Experimental results demonstrate that USB-NeRF achieves better performance compared to prior works, in terms of RS effect removal, novel view image synthesis as well as camera motion estimation. Furthermore, our algorithm can also be used to recover high-fidelity high frame-rate global shutter video from a sequence of RS images.