 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobalPointer: Large-Scale Plane Adjustment with Bi-Convex Relaxation
Paper and Code
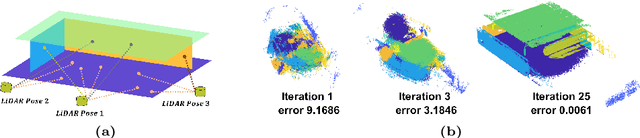
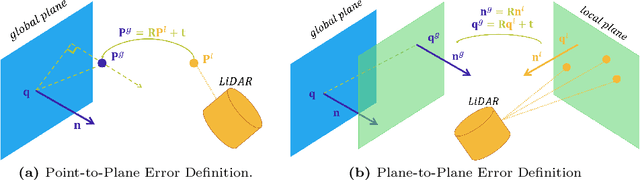
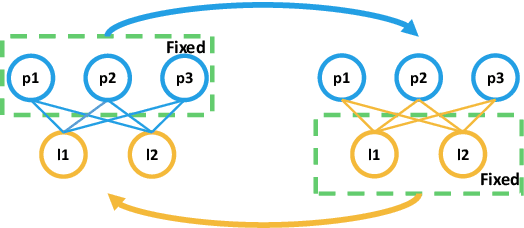
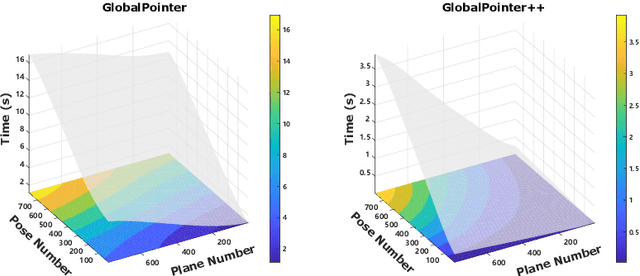
Plane adjustment (PA) is crucial for many 3D applications, involving simultaneous pose estimation and plane recovery. Despite recent advancements, it remains a challenging problem in the realm of multi-view point cloud registration. Current state-of-the-art methods can achieve globally optimal convergence only with good initialization. Furthermore, their high time complexity renders them impractical for large-scale problems. To address these challenges, we first exploit a novel optimization strategy termed \textit{Bi-Convex Relaxation}, which decouples the original problem into two simpler sub-problems, reformulates each sub-problem using a convex relaxation technique, and alternately solves each one until the original problem converges. Building on this strategy, we propose two algorithmic variants for solving the plane adjustment problem, namely \textit{GlobalPointer} and \textit{GlobalPointer++}, based on point-to-plane and plane-to-plane errors, respectively. Extensive experiments on both synthetic and real datasets demonstrate that our method can perform large-scale plane adjustment with linear time complexity, larger convergence region, and robustness to poor initialization, while achieving similar accuracy as prior methods. The code is available at https://github.com/wu-cvgl/GlobalPointer.