 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDROID-SLAM in the Wild
Mar 19, 2026We present a robust, real-time RGB SLAM system that handles dynamic environments by leveraging differentiable Uncertainty-aware Bundle Adjustment. Traditional SLAM methods typically assume static scenes, leading to tracking failures in the presence of motion. Recent dynamic SLAM approaches attempt to address this challenge using predefined dynamic priors or uncertainty-aware mapping, but they remain limited when confronted with unknown dynamic objects or highly cluttered scenes where geometric mapping becomes unreliable. In contrast, our method estimates per-pixel uncertainty by exploiting multi-view visual feature inconsistency, enabling robust tracking and reconstruction even in real-world environments. The proposed system achieves state-of-the-art camera poses and scene geometry in cluttered dynamic scenarios while running in real time at around 10 FPS. Code and datasets are available at https://github.com/MoyangLi00/DROID-W.git.
Dynamic Vision Mamba
Apr 07, 2025



Mamba-based vision models have gained extensive attention as a result of being computationally more efficient than attention-based models. However, spatial redundancy still exists in these models, represented by token and block redundancy. For token redundancy, we analytically find that early token pruning methods will result in inconsistency between training and inference or introduce extra computation for inference. Therefore, we customize token pruning to fit the Mamba structure by rearranging the pruned sequence before feeding it into the next Mamba block. For block redundancy, we allow each image to select SSM blocks dynamically based on an empirical observation that the inference speed of Mamba-based vision models is largely affected by the number of SSM blocks. Our proposed method, Dynamic Vision Mamba (DyVM), effectively reduces FLOPs with minor performance drops. We achieve a reduction of 35.2\% FLOPs with only a loss of accuracy of 1.7\% on Vim-S. It also generalizes well across different Mamba vision model architectures and different vision tasks. Our code will be made public.
USB-NeRF: Unrolling Shutter Bundle Adjusted Neural Radiance Fields
Oct 05, 2023


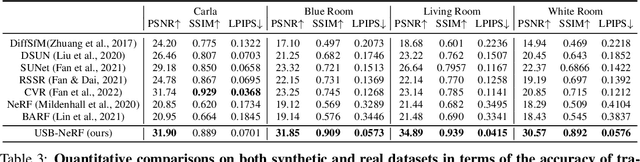
Neural Radiance Fields (NeRF) has received much attention recently due to its impressive capability to represent 3D scene and synthesize novel view images. Existing works usually assume that the input images are captured by a global shutter camera. Thus, rolling shutter (RS) images cannot be trivially applied to an off-the-shelf NeRF algorithm for novel view synthesis. Rolling shutter effect would also affect the accuracy of the camera pose estimation (e.g. via COLMAP), which further prevents the success of NeRF algorithm with RS images. In this paper, we propose Unrolling Shutter Bundle Adjusted Neural Radiance Fields (USB-NeRF). USB-NeRF is able to correct rolling shutter distortions and recover accurate camera motion trajectory simultaneously under the framework of NeRF, by modeling the physical image formation process of a RS camera. Experimental results demonstrate that USB-NeRF achieves better performance compared to prior works, in terms of RS effect removal, novel view image synthesis as well as camera motion estimation. Furthermore, our algorithm can also be used to recover high-fidelity high frame-rate global shutter video from a sequence of RS images.