 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOCDet: Object Center Detection via Bounding Box-Aware Heatmap Prediction on Edge Devices with NPUs
Nov 23, 2024Real-time object localization on edge devices is fundamental for numerous applications, ranging from surveillance to industrial automation. Traditional frameworks, such as object detection, segmentation, and keypoint detection, struggle in resource-constrained environments, often resulting in substantial target omissions. To address these challenges, we introduce OCDet, a lightweight Object Center Detection framework optimized for edge devices with NPUs. OCDet predicts heatmaps representing object center probabilities and extracts center points through peak identification. Unlike prior methods using fixed Gaussian distribution, we introduce Generalized Centerness (GC) to generate ground truth heatmaps from bounding box annotations, providing finer spatial details without additional manual labeling. Built on NPU-friendly Semantic FPN with MobileNetV4 backbones, OCDet models are trained by our Balanced Continuous Focal Loss (BCFL), which alleviates data imbalance and focuses training on hard negative examples for probability regression tasks. Leveraging the novel Center Alignment Score (CAS) with Hungarian matching, we demonstrate that OCDet consistently outperforms YOLO11 in object center detection, achieving up to 23% higher CAS while requiring 42% fewer parameters, 34% less computation, and 64% lower NPU latency. When compared to keypoint detection frameworks, OCDet achieves substantial CAS improvements up to 186% using identical models. By integrating GC, BCFL, and CAS, OCDet establishes a new paradigm for efficient and robust object center detection on edge devices with NPUs. The code is released at https://github.com/chen-xin-94/ocdet.
DART: An Automated End-to-End Object Detection Pipeline with Data Diversification, Open-Vocabulary Bounding Box Annotation, Pseudo-Label Review, and Model Training
Jul 12, 2024



Swift and accurate detection of specified objects is crucial for many industrial applications, such as safety monitoring on construction sites. However, traditional approaches rely heavily on arduous manual annotation and data collection, which struggle to adapt to ever-changing environments and novel target objects. To address these limitations, this paper presents DART, an automated end-to-end pipeline designed to streamline the entire workflow of an object detection application from data collection to model deployment. DART eliminates the need for human labeling and extensive data collection while excelling in diverse scenarios. It employs a subject-driven image generation module (DreamBooth with SDXL) for data diversification, followed by an annotation stage where open-vocabulary object detection (Grounding DINO) generates bounding box annotations for both generated and original images. These pseudo-labels are then reviewed by a large multimodal model (GPT-4o) to guarantee credibility before serving as ground truth to train real-time object detectors (YOLO). We apply DART to a self-collected dataset of construction machines named Liebherr Product, which contains over 15K high-quality images across 23 categories. The current implementation of DART significantly increases average precision (AP) from 0.064 to 0.832. Furthermore, we adopt a modular design for DART to ensure easy exchangeability and extensibility. This allows for a smooth transition to more advanced algorithms in the future, seamless integration of new object categories without manual labeling, and adaptability to customized environments without extra data collection. The code and dataset are released at https://github.com/chen-xin-94/DART.
Explainable Online Validation of Machine Learning Models for Practical Applications
Oct 30, 2020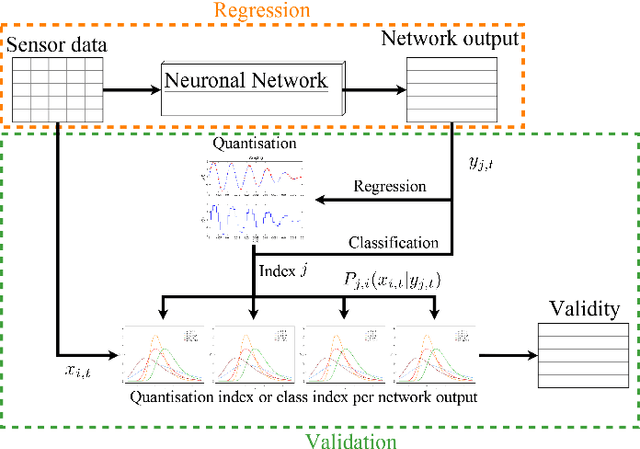
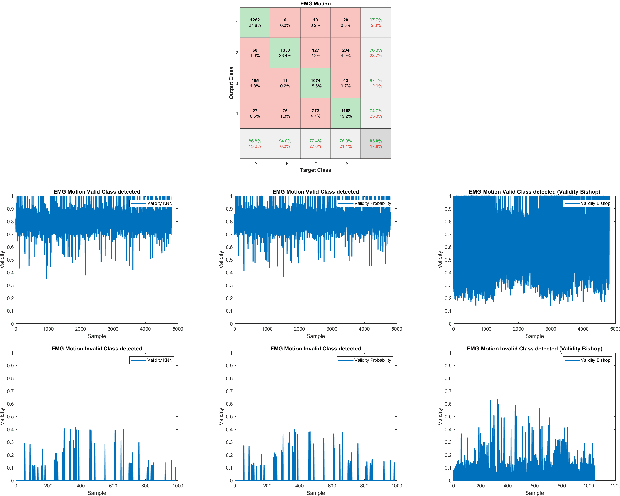
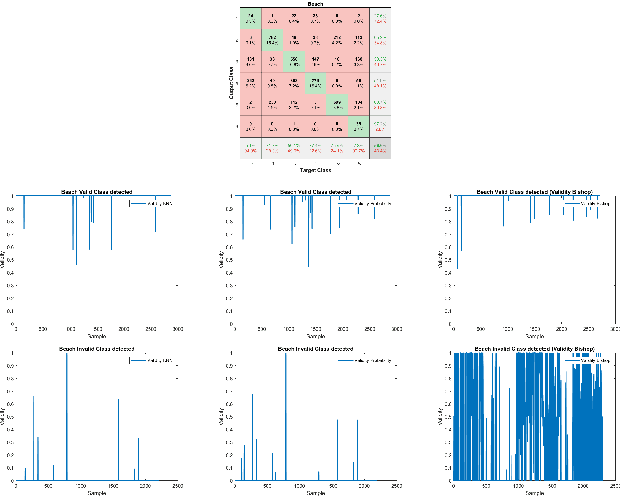
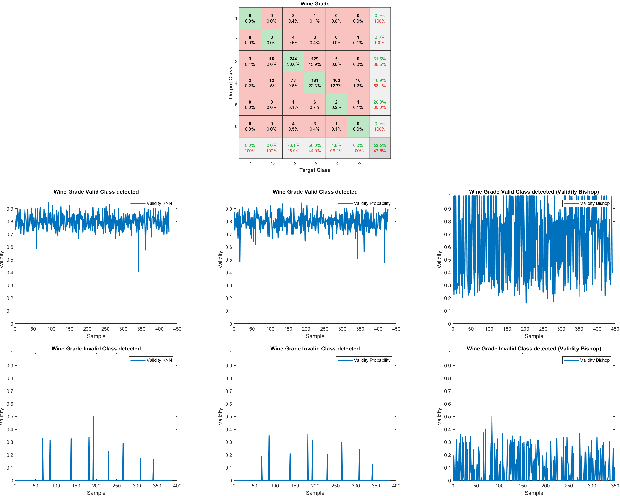
We present a reformulation of the regression and classification, which aims to validate the result of a machine learning algorithm. Our reformulation simplifies the original problem and validates the result of the machine learning algorithm using the training data. Since the validation of machine learning algorithms must always be explainable, we perform our experiments with the kNN algorithm as well as with an algorithm based on conditional probabilities, which is proposed in this work. For the evaluation of our approach, three publicly available data sets were used and three classification and two regression problems were evaluated. The presented algorithm based on conditional probabilities is also online capable and requires only a fraction of memory compared to the kNN algorithm.
Versatile emulation of spiking neural networks on an accelerated neuromorphic substrate
Dec 30, 2019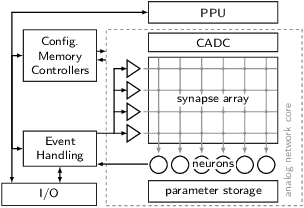
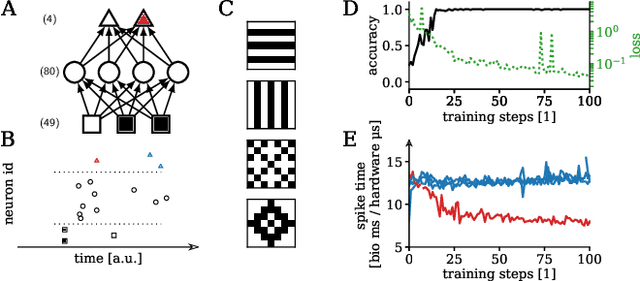
We present first experimental results on the novel BrainScaleS-2 neuromorphic architecture based on an analog neuro-synaptic core and augmented by embedded microprocessors for complex plasticity and experiment control. The high acceleration factor of 1000 compared to biological dynamics enables the execution of computationally expensive tasks, by allowing the fast emulation of long-duration experiments or rapid iteration over many consecutive trials. The flexibility of our architecture is demonstrated in a suite of five distinct experiments, which emphasize different aspects of the BrainScaleS-2 system.
Demonstrating Advantages of Neuromorphic Computation: A Pilot Study
Nov 29, 2018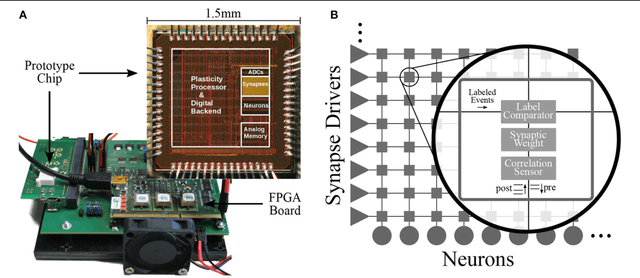
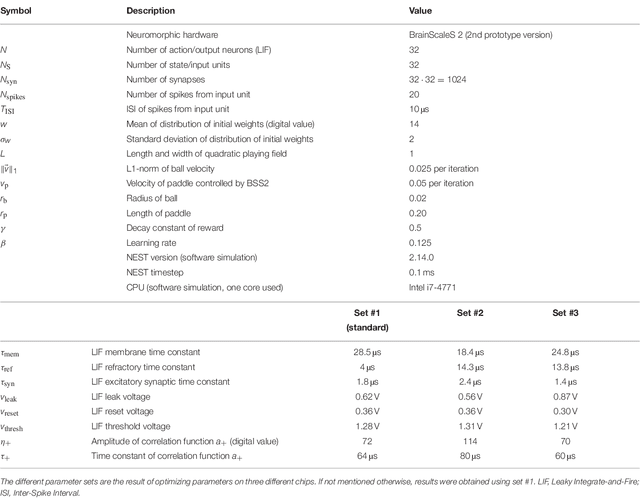
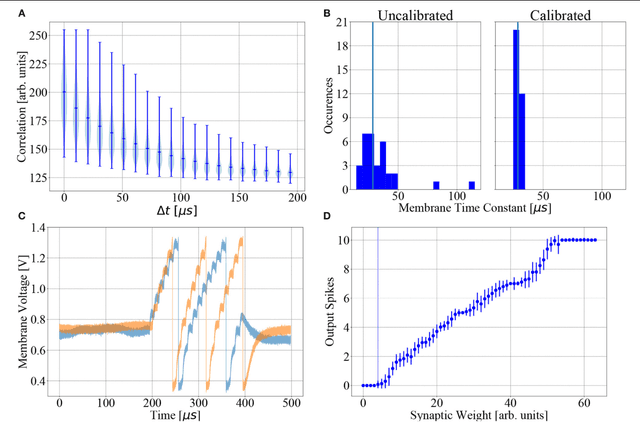
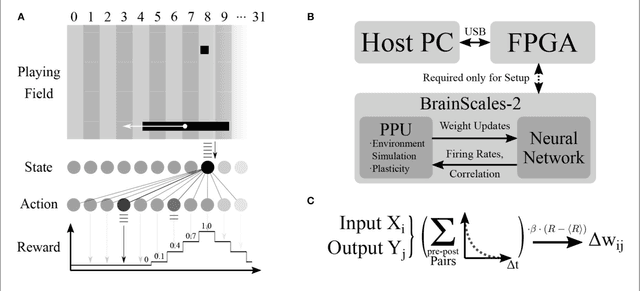
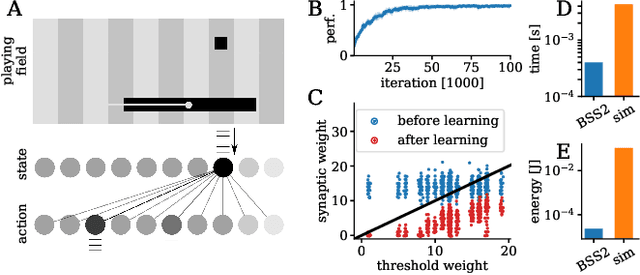
Neuromorphic devices represent an attempt to mimic aspects of the brain's architecture and dynamics with the aim of replicating its hallmark functional capabilities in terms of computational power, robust learning and energy efficiency. We employ a single-chip prototype of the BrainScaleS 2 neuromorphic system to implement a proof-of-concept demonstration of reward-modulated spike-timing-dependent plasticity in a spiking network that learns to play the Pong video game by smooth pursuit. This system combines an electronic mixed-signal substrate for emulating neuron and synapse dynamics with an embedded digital processor for on-chip learning, which in this work also serves to simulate the virtual environment and learning agent. The analog emulation of neuronal membrane dynamics enables a 1000-fold acceleration with respect to biological real-time, with the entire chip operating on a power budget of 57mW. Compared to an equivalent simulation using state-of-the-art software, the on-chip emulation is at least one order of magnitude faster and three orders of magnitude more energy-efficient. We demonstrate how on-chip learning can mitigate the effects of fixed-pattern noise, which is unavoidable in analog substrates, while making use of temporal variability for action exploration. Learning compensates imperfections of the physical substrate, as manifested in neuronal parameter variability, by adapting synaptic weights to match respective excitability of individual neurons.
Generative models on accelerated neuromorphic hardware
Jul 11, 2018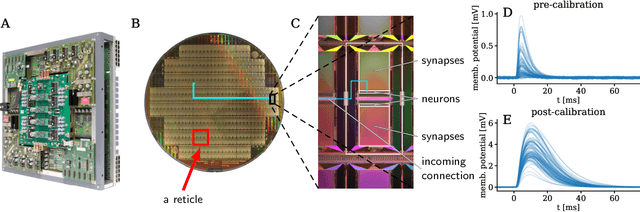
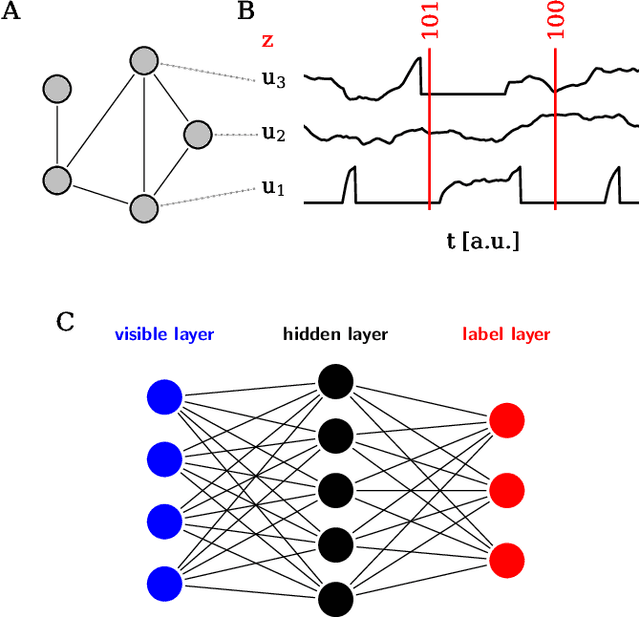
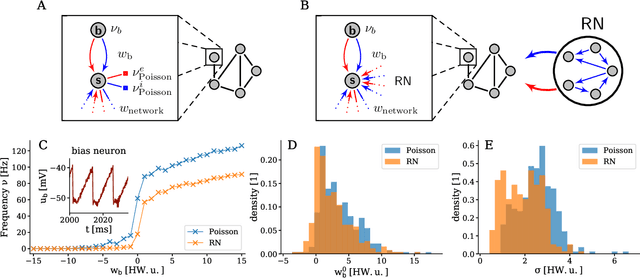
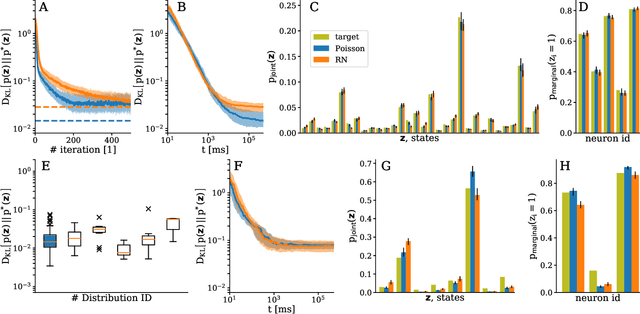
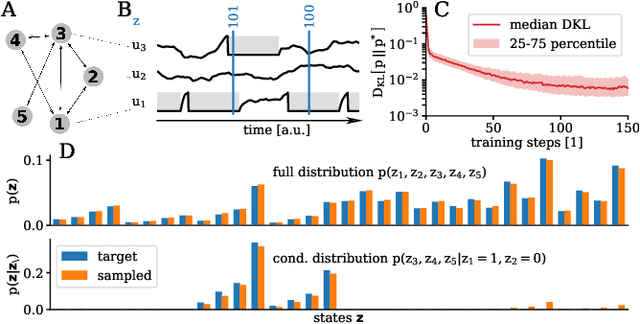
The traditional von Neumann computer architecture faces serious obstacles, both in terms of miniaturization and in terms of heat production, with increasing performance. Artificial neural (neuromorphic) substrates represent an alternative approach to tackle this challenge. A special subset of these systems follow the principle of "physical modeling" as they directly use the physical properties of the underlying substrate to realize computation with analog components. While these systems are potentially faster and/or more energy efficient than conventional computers, they require robust models that can cope with their inherent limitations in terms of controllability and range of parameters. A natural source of inspiration for robust models is neuroscience as the brain faces similar challenges. It has been recently suggested that sampling with the spiking dynamics of neurons is potentially suitable both as a generative and a discriminative model for artificial neural substrates. In this work we present the implementation of sampling with leaky integrate-and-fire neurons on the BrainScaleS physical model system. We prove the sampling property of the network and demonstrate its applicability to high-dimensional datasets. The required stochasticity is provided by a spiking random network on the same substrate. This allows the system to run in a self-contained fashion without external stochastic input from the host environment. The implementation provides a basis as a building block in large-scale biologically relevant emulations, as a fast approximate sampler or as a framework to realize on-chip learning on (future generations of) accelerated spiking neuromorphic hardware. Our work contributes to the development of robust computation on physical model systems.
Pattern representation and recognition with accelerated analog neuromorphic systems
Jul 03, 2017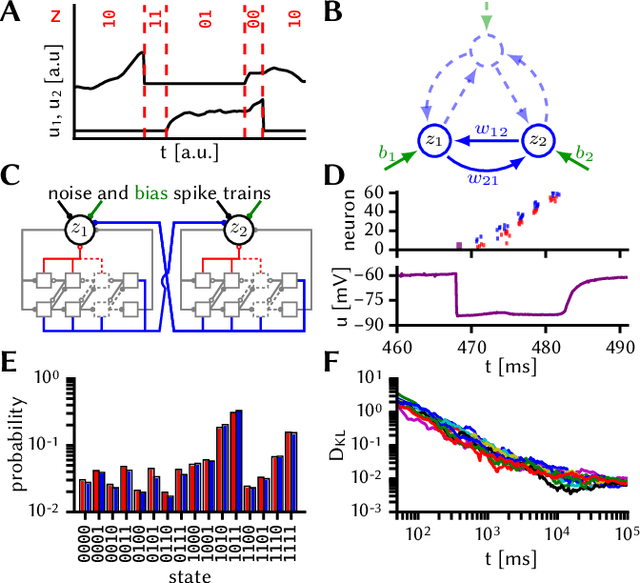

Despite being originally inspired by the central nervous system, artificial neural networks have diverged from their biological archetypes as they have been remodeled to fit particular tasks. In this paper, we review several possibilites to reverse map these architectures to biologically more realistic spiking networks with the aim of emulating them on fast, low-power neuromorphic hardware. Since many of these devices employ analog components, which cannot be perfectly controlled, finding ways to compensate for the resulting effects represents a key challenge. Here, we discuss three different strategies to address this problem: the addition of auxiliary network components for stabilizing activity, the utilization of inherently robust architectures and a training method for hardware-emulated networks that functions without perfect knowledge of the system's dynamics and parameters. For all three scenarios, we corroborate our theoretical considerations with experimental results on accelerated analog neuromorphic platforms.
* accepted at ISCAS 2017
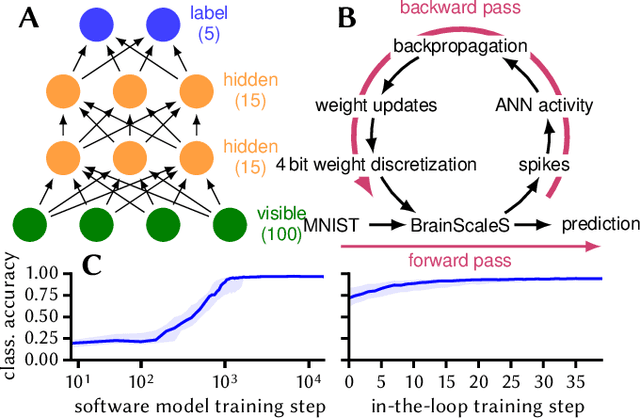
Neuromorphic Hardware In The Loop: Training a Deep Spiking Network on the BrainScaleS Wafer-Scale System
Mar 06, 2017
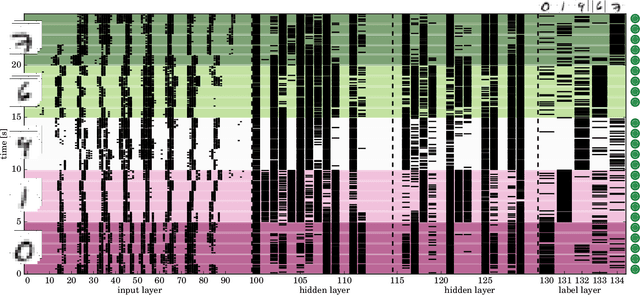
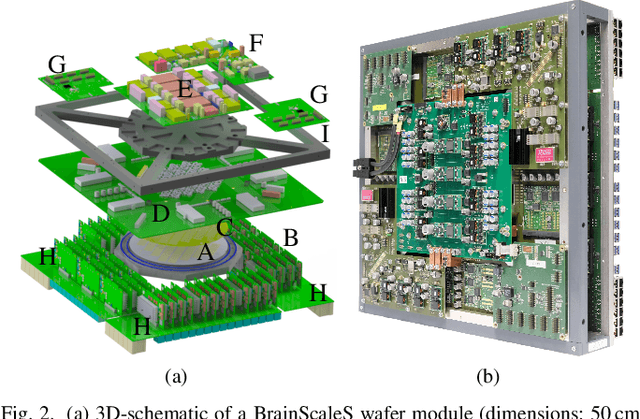
Emulating spiking neural networks on analog neuromorphic hardware offers several advantages over simulating them on conventional computers, particularly in terms of speed and energy consumption. However, this usually comes at the cost of reduced control over the dynamics of the emulated networks. In this paper, we demonstrate how iterative training of a hardware-emulated network can compensate for anomalies induced by the analog substrate. We first convert a deep neural network trained in software to a spiking network on the BrainScaleS wafer-scale neuromorphic system, thereby enabling an acceleration factor of 10 000 compared to the biological time domain. This mapping is followed by the in-the-loop training, where in each training step, the network activity is first recorded in hardware and then used to compute the parameter updates in software via backpropagation. An essential finding is that the parameter updates do not have to be precise, but only need to approximately follow the correct gradient, which simplifies the computation of updates. Using this approach, after only several tens of iterations, the spiking network shows an accuracy close to the ideal software-emulated prototype. The presented techniques show that deep spiking networks emulated on analog neuromorphic devices can attain good computational performance despite the inherent variations of the analog substrate.
Demonstrating Hybrid Learning in a Flexible Neuromorphic Hardware System
Oct 13, 2016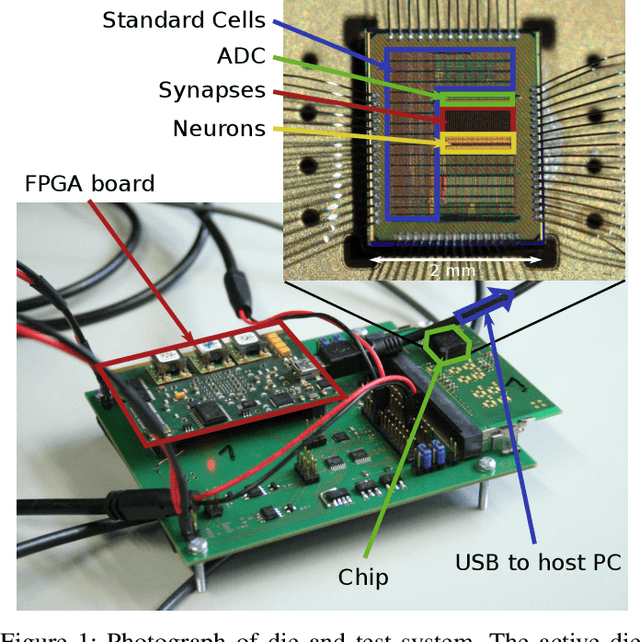
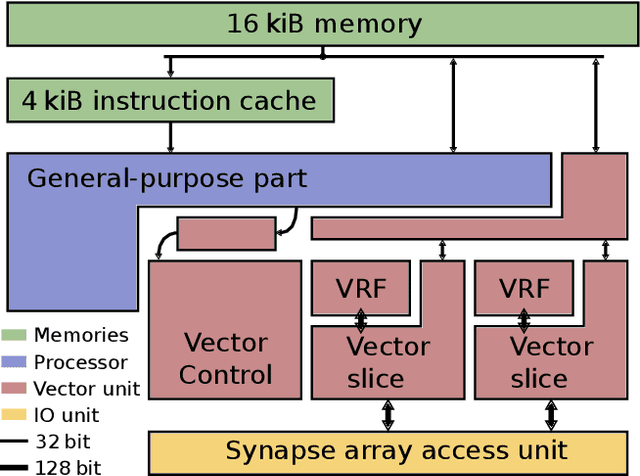
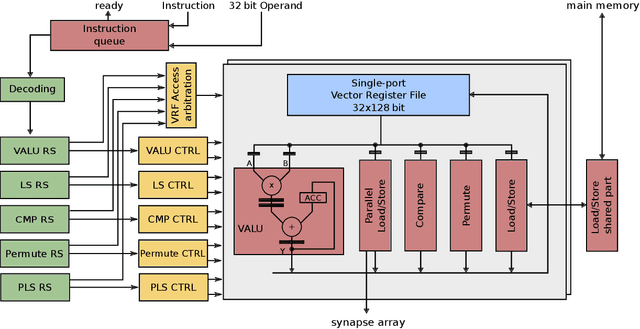
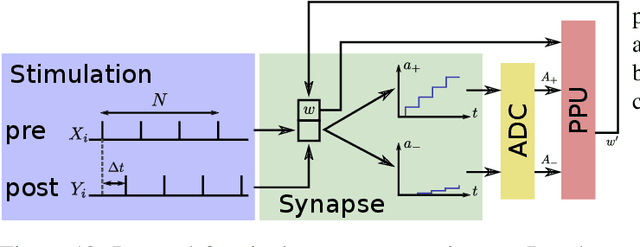
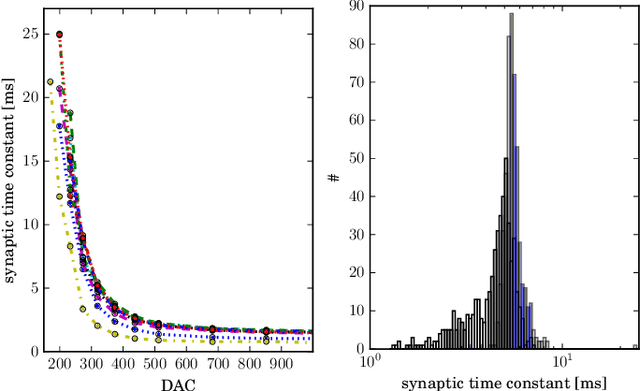
We present results from a new approach to learning and plasticity in neuromorphic hardware systems: to enable flexibility in implementable learning mechanisms while keeping high efficiency associated with neuromorphic implementations, we combine a general-purpose processor with full-custom analog elements. This processor is operating in parallel with a fully parallel neuromorphic system consisting of an array of synapses connected to analog, continuous time neuron circuits. Novel analog correlation sensor circuits process spike events for each synapse in parallel and in real-time. The processor uses this pre-processing to compute new weights possibly using additional information following its program. Therefore, learning rules can be defined in software giving a large degree of flexibility. Synapses realize correlation detection geared towards Spike-Timing Dependent Plasticity (STDP) as central computational primitive in the analog domain. Operating at a speed-up factor of 1000 compared to biological time-scale, we measure time-constants from tens to hundreds of micro-seconds. We analyze variability across multiple chips and demonstrate learning using a multiplicative STDP rule. We conclude, that the presented approach will enable flexible and efficient learning as a platform for neuroscientific research and technological applications.