 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHunyuan-TurboS: Advancing Large Language Models through Mamba-Transformer Synergy and Adaptive Chain-of-Thought
May 21, 2025As Large Language Models (LLMs) rapidly advance, we introduce Hunyuan-TurboS, a novel large hybrid Transformer-Mamba Mixture of Experts (MoE) model. It synergistically combines Mamba's long-sequence processing efficiency with Transformer's superior contextual understanding. Hunyuan-TurboS features an adaptive long-short chain-of-thought (CoT) mechanism, dynamically switching between rapid responses for simple queries and deep "thinking" modes for complex problems, optimizing computational resources. Architecturally, this 56B activated (560B total) parameter model employs 128 layers (Mamba2, Attention, FFN) with an innovative AMF/MF block pattern. Faster Mamba2 ensures linear complexity, Grouped-Query Attention minimizes KV cache, and FFNs use an MoE structure. Pre-trained on 16T high-quality tokens, it supports a 256K context length and is the first industry-deployed large-scale Mamba model. Our comprehensive post-training strategy enhances capabilities via Supervised Fine-Tuning (3M instructions), a novel Adaptive Long-short CoT Fusion method, Multi-round Deliberation Learning for iterative improvement, and a two-stage Large-scale Reinforcement Learning process targeting STEM and general instruction-following. Evaluations show strong performance: overall top 7 rank on LMSYS Chatbot Arena with a score of 1356, outperforming leading models like Gemini-2.0-Flash-001 (1352) and o4-mini-2025-04-16 (1345). TurboS also achieves an average of 77.9% across 23 automated benchmarks. Hunyuan-TurboS balances high performance and efficiency, offering substantial capabilities at lower inference costs than many reasoning models, establishing a new paradigm for efficient large-scale pre-trained models.
Hunyuan-Large: An Open-Source MoE Model with 52 Billion Activated Parameters by Tencent
Nov 05, 2024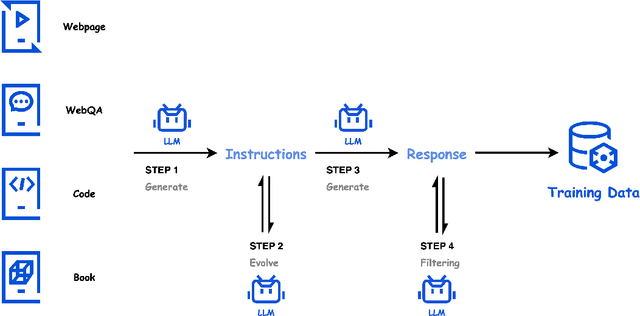
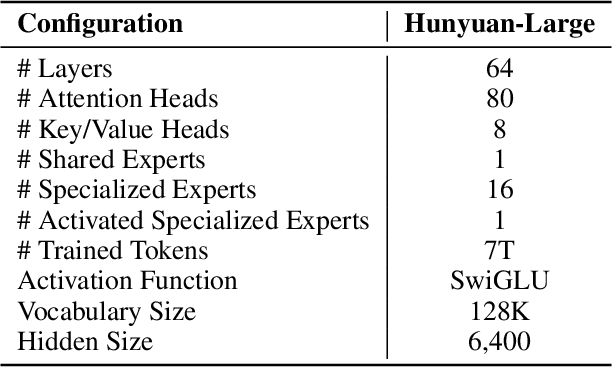
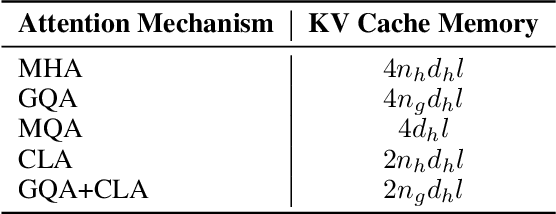
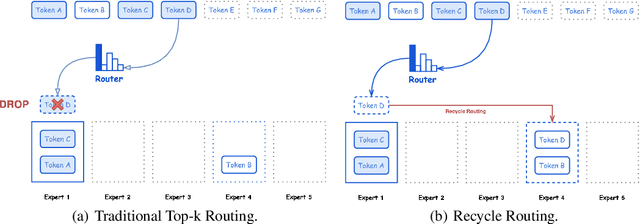
In this paper, we introduce Hunyuan-Large, which is currently the largest open-source Transformer-based mixture of experts model, with a total of 389 billion parameters and 52 billion activation parameters, capable of handling up to 256K tokens. We conduct a thorough evaluation of Hunyuan-Large's superior performance across various benchmarks including language understanding and generation, logical reasoning, mathematical problem-solving, coding, long-context, and aggregated tasks, where it outperforms LLama3.1-70B and exhibits comparable performance when compared to the significantly larger LLama3.1-405B model. Key practice of Hunyuan-Large include large-scale synthetic data that is orders larger than in previous literature, a mixed expert routing strategy, a key-value cache compression technique, and an expert-specific learning rate strategy. Additionally, we also investigate the scaling laws and learning rate schedule of mixture of experts models, providing valuable insights and guidances for future model development and optimization. The code and checkpoints of Hunyuan-Large are released to facilitate future innovations and applications. Codes: https://github.com/Tencent/Hunyuan-Large Models: https://huggingface.co/tencent/Tencent-Hunyuan-Large
Off-Policy Primal-Dual Safe Reinforcement Learning
Jan 26, 2024



Primal-dual safe RL methods commonly perform iterations between the primal update of the policy and the dual update of the Lagrange Multiplier. Such a training paradigm is highly susceptible to the error in cumulative cost estimation since this estimation serves as the key bond connecting the primal and dual update processes. We show that this problem causes significant underestimation of cost when using off-policy methods, leading to the failure to satisfy the safety constraint. To address this issue, we propose \textit{conservative policy optimization}, which learns a policy in a constraint-satisfying area by considering the uncertainty in cost estimation. This improves constraint satisfaction but also potentially hinders reward maximization. We then introduce \textit{local policy convexification} to help eliminate such suboptimality by gradually reducing the estimation uncertainty. We provide theoretical interpretations of the joint coupling effect of these two ingredients and further verify them by extensive experiments. Results on benchmark tasks show that our method not only achieves an asymptotic performance comparable to state-of-the-art on-policy methods while using much fewer samples, but also significantly reduces constraint violation during training. Our code is available at https://github.com/ZifanWu/CAL.
Policy-regularized Offline Multi-objective Reinforcement Learning
Jan 04, 2024



In this paper, we aim to utilize only offline trajectory data to train a policy for multi-objective RL. We extend the offline policy-regularized method, a widely-adopted approach for single-objective offline RL problems, into the multi-objective setting in order to achieve the above goal. However, such methods face a new challenge in offline MORL settings, namely the preference-inconsistent demonstration problem. We propose two solutions to this problem: 1) filtering out preference-inconsistent demonstrations via approximating behavior preferences, and 2) adopting regularization techniques with high policy expressiveness. Moreover, we integrate the preference-conditioned scalarized update method into policy-regularized offline RL, in order to simultaneously learn a set of policies using a single policy network, thus reducing the computational cost induced by the training of a large number of individual policies for various preferences. Finally, we introduce Regularization Weight Adaptation to dynamically determine appropriate regularization weights for arbitrary target preferences during deployment. Empirical results on various multi-objective datasets demonstrate the capability of our approach in solving offline MORL problems.
Safe Offline Reinforcement Learning with Real-Time Budget Constraints
Jun 01, 2023
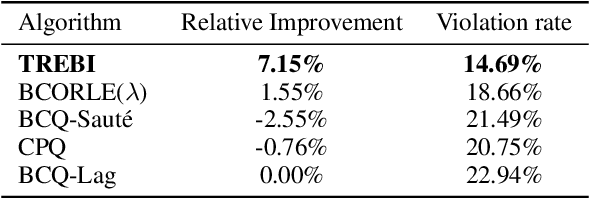

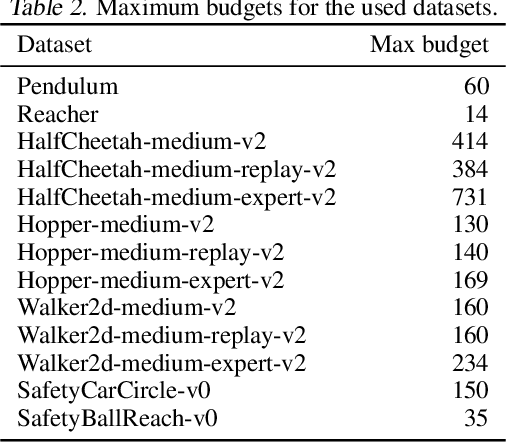
Aiming at promoting the safe real-world deployment of Reinforcement Learning (RL), research on safe RL has made significant progress in recent years. However, most existing works in the literature still focus on the online setting where risky violations of the safety budget are likely to be incurred during training. Besides, in many real-world applications, the learned policy is required to respond to dynamically determined safety budgets (i.e., constraint threshold) in real time. In this paper, we target at the above real-time budget constraint problem under the offline setting, and propose Trajectory-based REal-time Budget Inference (TREBI) as a novel solution that approaches this problem from the perspective of trajectory distribution. Theoretically, we prove an error bound of the estimation on the episodic reward and cost under the offline setting and thus provide a performance guarantee for TREBI. Empirical results on a wide range of simulation tasks and a real-world large-scale advertising application demonstrate the capability of TREBI in solving real-time budget constraint problems under offline settings.
Plan To Predict: Learning an Uncertainty-Foreseeing Model for Model-Based Reinforcement Learning
Jan 20, 2023



In Model-based Reinforcement Learning (MBRL), model learning is critical since an inaccurate model can bias policy learning via generating misleading samples. However, learning an accurate model can be difficult since the policy is continually updated and the induced distribution over visited states used for model learning shifts accordingly. Prior methods alleviate this issue by quantifying the uncertainty of model-generated samples. However, these methods only quantify the uncertainty passively after the samples were generated, rather than foreseeing the uncertainty before model trajectories fall into those highly uncertain regions. The resulting low-quality samples can induce unstable learning targets and hinder the optimization of the policy. Moreover, while being learned to minimize one-step prediction errors, the model is generally used to predict for multiple steps, leading to a mismatch between the objectives of model learning and model usage. To this end, we propose \emph{Plan To Predict} (P2P), an MBRL framework that treats the model rollout process as a sequential decision making problem by reversely considering the model as a decision maker and the current policy as the dynamics. In this way, the model can quickly adapt to the current policy and foresee the multi-step future uncertainty when generating trajectories. Theoretically, we show that the performance of P2P can be guaranteed by approximately optimizing a lower bound of the true environment return. Empirical results demonstrate that P2P achieves state-of-the-art performance on several challenging benchmark tasks.
Coordinated Proximal Policy Optimization
Nov 07, 2021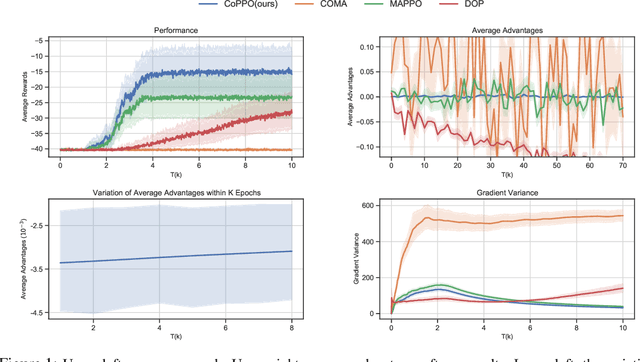
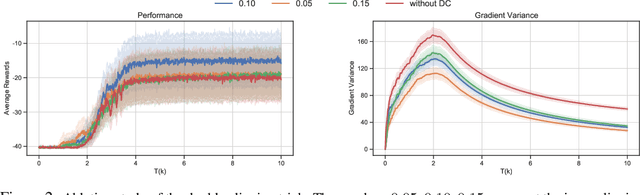
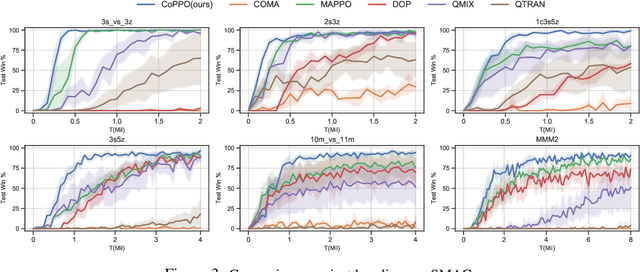
We present Coordinated Proximal Policy Optimization (CoPPO), an algorithm that extends the original Proximal Policy Optimization (PPO) to the multi-agent setting. The key idea lies in the coordinated adaptation of step size during the policy update process among multiple agents. We prove the monotonicity of policy improvement when optimizing a theoretically-grounded joint objective, and derive a simplified optimization objective based on a set of approximations. We then interpret that such an objective in CoPPO can achieve dynamic credit assignment among agents, thereby alleviating the high variance issue during the concurrent update of agent policies. Finally, we demonstrate that CoPPO outperforms several strong baselines and is competitive with the latest multi-agent PPO method (i.e. MAPPO) under typical multi-agent settings, including cooperative matrix games and the StarCraft II micromanagement tasks.