 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding and Mitigating Spurious Signal Amplification in Test-Time Reinforcement Learning for Math Reasoning
Apr 23, 2026Test-time reinforcement learning (TTRL) always adapts models at inference time via pseudo-labeling, leaving it vulnerable to spurious optimization signals from label noise. Through an empirical study, we observe that responses with medium consistency form an ambiguity region and constitute the primary source of reward noise. Crucially, we find that such spurious signals can be even amplified through group-relative advantage estimation. Motivated by these findings, we propose a unified framework, Debiased and Denoised test-time Reinforcement Learning (DDRL), to mitigate spurious signals. Concretely, DDRL first applies a frequency-based sampling strategy to exclude ambiguous samples while maintaining a balanced set of positive and negative examples. It then adopts a debiased advantage estimation with fixed advantages, removing the bias introduced by group-relative policy optimization. Finally, DDRL incorporates a consensus-based off-policy refinement stage, which leverages the rejection-sampled dataset to enable efficient and stable model updates. Experiments on three large language models across multiple mathematical reasoning benchmarks demonstrate that DDRL consistently outperforms existing TTRL baselines. The code will soon be released at https://github.com/yuyongcan/DDRL.
How to Train Your Deep Research Agent? Prompt, Reward, and Policy Optimization in Search-R1
Feb 23, 2026Deep Research agents tackle knowledge-intensive tasks through multi-round retrieval and decision-oriented generation. While reinforcement learning (RL) has been shown to improve performance in this paradigm, its contributions remain underexplored. To fully understand the role of RL, we conduct a systematic study along three decoupled dimensions: prompt template, reward function, and policy optimization. Our study reveals that: 1) the Fast Thinking template yields greater stability and better performance than the Slow Thinking template used in prior work; 2) the F1-based reward underperforms the EM due to training collapse driven by answer avoidance; this can be mitigated by incorporating action-level penalties, ultimately surpassing EM; 3) REINFORCE outperforms PPO while requiring fewer search actions, whereas GRPO shows the poorest stability among policy optimization methods. Building on these insights, we then introduce Search-R1++, a strong baseline that improves the performance of Search-R1 from 0.403 to 0.442 (Qwen2.5-7B) and 0.289 to 0.331 (Qwen2.5-3B). We hope that our findings can pave the way for more principled and reliable RL training strategies in Deep Research systems.
Do MLLMs Really Understand Space? A Mathematical Reasoning Evaluation
Feb 12, 2026Multimodal large language models (MLLMs) have achieved strong performance on perception-oriented tasks, yet their ability to perform mathematical spatial reasoning, defined as the capacity to parse and manipulate two- and three-dimensional relations, remains unclear. Humans easily solve textbook-style spatial reasoning problems with over 95\% accuracy, but we find that most leading MLLMs fail to reach even 60\% on the same tasks. This striking gap highlights spatial reasoning as a fundamental weakness of current models. To investigate this gap, we present MathSpatial, a unified framework for evaluating and improving spatial reasoning in MLLMs. MathSpatial includes three complementary components: (i) MathSpatial-Bench, a benchmark of 2K problems across three categories and eleven subtypes, designed to isolate reasoning difficulty from perceptual noise; (ii) MathSpatial-Corpus, a training dataset of 8K additional problems with verified solutions; and (iii) MathSpatial-SRT, which models reasoning as structured traces composed of three atomic operations--Correlate, Constrain, and Infer. Experiments show that fine-tuning Qwen2.5-VL-7B on MathSpatial achieves competitive accuracy while reducing tokens by 25\%. MathSpatial provides the first large-scale resource that disentangles perception from reasoning, enabling precise measurement and comprehensive understanding of mathematical spatial reasoning in MLLMs.
Reassessing the Role of Supervised Fine-Tuning: An Empirical Study in VLM Reasoning
Dec 14, 2025Recent advances in vision-language models (VLMs) reasoning have been largely attributed to the rise of reinforcement Learning (RL), which has shifted the community's focus away from the supervised fine-tuning (SFT) paradigm. Many studies suggest that introducing the SFT stage not only fails to improve reasoning ability but may also negatively impact model training. In this study, we revisit this RL-centric belief through a systematic and controlled comparison of SFT and RL on VLM Reasoning. Using identical data sources, we find that the relative effectiveness of SFT and RL is conditional and strongly influenced by model capacity, data scale, and data distribution. Contrary to common assumptions, our findings show that SFT plays a crucial role across several scenarios: (1) Effectiveness for weaker models. SFT more reliably elicits reasoning capabilities in smaller or weaker VLMs. (2) Data efficiency. SFT with only 2K achieves comparable or better reasoning performance to RL with 20K. (3) Cross-modal transferability. SFT demonstrates stronger generalization across modalities. Moreover, we identify a pervasive issue of deceptive rewards, where higher rewards fail to correlate with better reasoning accuracy in RL. These results challenge the prevailing "RL over SFT" narrative. They highlight that the role of SFT may have been underestimated and support a more balanced post-training pipeline in which SFT and RL function as complementary components.
AI-Salesman: Towards Reliable Large Language Model Driven Telemarketing
Nov 15, 2025Goal-driven persuasive dialogue, exemplified by applications like telemarketing, requires sophisticated multi-turn planning and strict factual faithfulness, which remains a significant challenge for even state-of-the-art Large Language Models (LLMs). A lack of task-specific data often limits previous works, and direct LLM application suffers from strategic brittleness and factual hallucination. In this paper, we first construct and release TeleSalesCorpus, the first real-world-grounded dialogue dataset for this domain. We then propose AI-Salesman, a novel framework featuring a dual-stage architecture. For the training stage, we design a Bayesian-supervised reinforcement learning algorithm that learns robust sales strategies from noisy dialogues. For the inference stage, we introduce the Dynamic Outline-Guided Agent (DOGA), which leverages a pre-built script library to provide dynamic, turn-by-turn strategic guidance. Moreover, we design a comprehensive evaluation framework that combines fine-grained metrics for key sales skills with the LLM-as-a-Judge paradigm. Experimental results demonstrate that our proposed AI-Salesman significantly outperforms baseline models in both automatic metrics and comprehensive human evaluations, showcasing its effectiveness in complex persuasive scenarios.
Off-Policy Primal-Dual Safe Reinforcement Learning
Jan 26, 2024



Primal-dual safe RL methods commonly perform iterations between the primal update of the policy and the dual update of the Lagrange Multiplier. Such a training paradigm is highly susceptible to the error in cumulative cost estimation since this estimation serves as the key bond connecting the primal and dual update processes. We show that this problem causes significant underestimation of cost when using off-policy methods, leading to the failure to satisfy the safety constraint. To address this issue, we propose \textit{conservative policy optimization}, which learns a policy in a constraint-satisfying area by considering the uncertainty in cost estimation. This improves constraint satisfaction but also potentially hinders reward maximization. We then introduce \textit{local policy convexification} to help eliminate such suboptimality by gradually reducing the estimation uncertainty. We provide theoretical interpretations of the joint coupling effect of these two ingredients and further verify them by extensive experiments. Results on benchmark tasks show that our method not only achieves an asymptotic performance comparable to state-of-the-art on-policy methods while using much fewer samples, but also significantly reduces constraint violation during training. Our code is available at https://github.com/ZifanWu/CAL.
HiBid: A Cross-Channel Constrained Bidding System with Budget Allocation by Hierarchical Offline Deep Reinforcement Learning
Dec 29, 2023



Online display advertising platforms service numerous advertisers by providing real-time bidding (RTB) for the scale of billions of ad requests every day. The bidding strategy handles ad requests cross multiple channels to maximize the number of clicks under the set financial constraints, i.e., total budget and cost-per-click (CPC), etc. Different from existing works mainly focusing on single channel bidding, we explicitly consider cross-channel constrained bidding with budget allocation. Specifically, we propose a hierarchical offline deep reinforcement learning (DRL) framework called ``HiBid'', consisted of a high-level planner equipped with auxiliary loss for non-competitive budget allocation, and a data augmentation enhanced low-level executor for adaptive bidding strategy in response to allocated budgets. Additionally, a CPC-guided action selection mechanism is introduced to satisfy the cross-channel CPC constraint. Through extensive experiments on both the large-scale log data and online A/B testing, we confirm that HiBid outperforms six baselines in terms of the number of clicks, CPC satisfactory ratio, and return-on-investment (ROI). We also deploy HiBid on Meituan advertising platform to already service tens of thousands of advertisers every day.
RL-MPCA: A Reinforcement Learning Based Multi-Phase Computation Allocation Approach for Recommender Systems
Dec 27, 2023



Recommender systems aim to recommend the most suitable items to users from a large number of candidates. Their computation cost grows as the number of user requests and the complexity of services (or models) increases. Under the limitation of computation resources (CRs), how to make a trade-off between computation cost and business revenue becomes an essential question. The existing studies focus on dynamically allocating CRs in queue truncation scenarios (i.e., allocating the size of candidates), and formulate the CR allocation problem as an optimization problem with constraints. Some of them focus on single-phase CR allocation, and others focus on multi-phase CR allocation but introduce some assumptions about queue truncation scenarios. However, these assumptions do not hold in other scenarios, such as retrieval channel selection and prediction model selection. Moreover, existing studies ignore the state transition process of requests between different phases, limiting the effectiveness of their approaches. This paper proposes a Reinforcement Learning (RL) based Multi-Phase Computation Allocation approach (RL-MPCA), which aims to maximize the total business revenue under the limitation of CRs. RL-MPCA formulates the CR allocation problem as a Weakly Coupled MDP problem and solves it with an RL-based approach. Specifically, RL-MPCA designs a novel deep Q-network to adapt to various CR allocation scenarios, and calibrates the Q-value by introducing multiple adaptive Lagrange multipliers (adaptive-$\lambda$) to avoid violating the global CR constraints. Finally, experiments on the offline simulation environment and online real-world recommender system validate the effectiveness of our approach.
Safe Offline Reinforcement Learning with Real-Time Budget Constraints
Jun 01, 2023
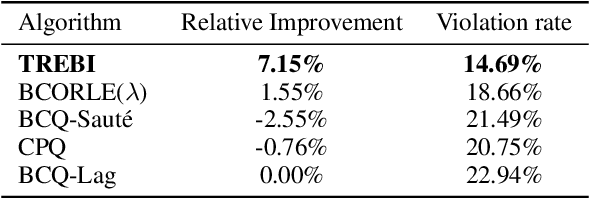

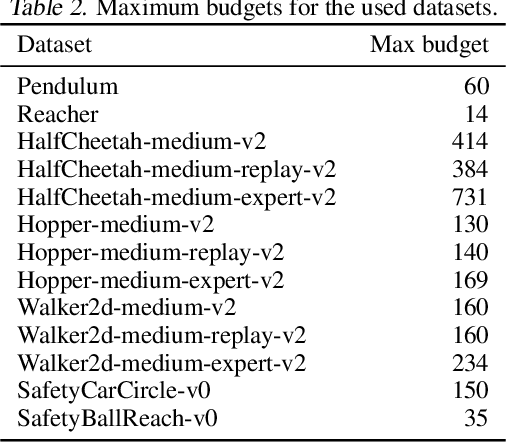
Aiming at promoting the safe real-world deployment of Reinforcement Learning (RL), research on safe RL has made significant progress in recent years. However, most existing works in the literature still focus on the online setting where risky violations of the safety budget are likely to be incurred during training. Besides, in many real-world applications, the learned policy is required to respond to dynamically determined safety budgets (i.e., constraint threshold) in real time. In this paper, we target at the above real-time budget constraint problem under the offline setting, and propose Trajectory-based REal-time Budget Inference (TREBI) as a novel solution that approaches this problem from the perspective of trajectory distribution. Theoretically, we prove an error bound of the estimation on the episodic reward and cost under the offline setting and thus provide a performance guarantee for TREBI. Empirical results on a wide range of simulation tasks and a real-world large-scale advertising application demonstrate the capability of TREBI in solving real-time budget constraint problems under offline settings.