 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Offline Reinforcement Learning with Real-Time Budget Constraints
Paper and Code
Jun 01, 2023
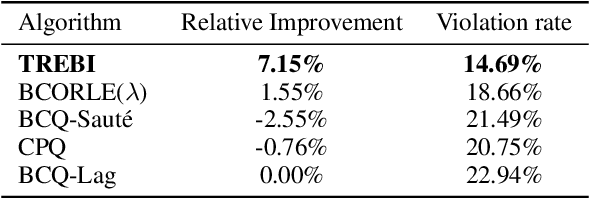

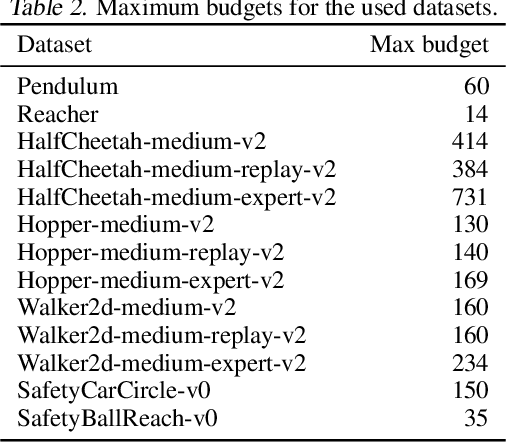
Aiming at promoting the safe real-world deployment of Reinforcement Learning (RL), research on safe RL has made significant progress in recent years. However, most existing works in the literature still focus on the online setting where risky violations of the safety budget are likely to be incurred during training. Besides, in many real-world applications, the learned policy is required to respond to dynamically determined safety budgets (i.e., constraint threshold) in real time. In this paper, we target at the above real-time budget constraint problem under the offline setting, and propose Trajectory-based REal-time Budget Inference (TREBI) as a novel solution that approaches this problem from the perspective of trajectory distribution. Theoretically, we prove an error bound of the estimation on the episodic reward and cost under the offline setting and thus provide a performance guarantee for TREBI. Empirical results on a wide range of simulation tasks and a real-world large-scale advertising application demonstrate the capability of TREBI in solving real-time budget constraint problems under offline settings.