 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA2DEPT: Large Language Model-Driven Automated Algorithm Design via Evolutionary Program Trees
Apr 27, 2026Designing heuristics for combinatorial optimization problems (COPs) is a fundamental yet challenging task that traditionally requires extensive domain expertise. Recently, Large Language Model (LLM)-based Automated Heuristic Design (AHD) has shown promise in autonomously generating heuristic components with minimal human intervention. However, most existing LLM-based AHD methods enforce fixed algorithmic templates to ensure executability, which confines the search to component-level tuning and limits system-level algorithmic expressiveness. To enable open-ended solver synthesis beyond rigid templates, we propose Automated Algorithm Design via Evolutionary Program Trees (A2DEPT), which treats LLMs as system-level algorithm architects. A2DEPT explores the vast program space via a tree-structured evolutionary search with hybrid selection and hierarchical operators, enabling iterative refinement of complete algorithms. To make open-ended generation practical, we enforce executability with a lightweight program-maintenance loop that performs feedback-driven repair. In experiments, A2DEPT consistently outperforms representative LLM-based baselines on both standard and highly constrained benchmarks. On the standard benchmarks, it reduces the mean normalized optimality gap by 9.8% relative to the strongest competing AHD baseline.
CityCube: Benchmarking Cross-view Spatial Reasoning on Vision-Language Models in Urban Environments
Jan 20, 2026Cross-view spatial reasoning is essential for embodied AI, underpinning spatial understanding, mental simulation and planning in complex environments. Existing benchmarks primarily emphasize indoor or street settings, overlooking the unique challenges of open-ended urban spaces characterized by rich semantics, complex geometries, and view variations. To address this, we introduce CityCube, a systematic benchmark designed to probe cross-view reasoning capabilities of current VLMs in urban settings. CityCube integrates four viewpoint dynamics to mimic camera movements and spans a wide spectrum of perspectives from multiple platforms, e.g., vehicles, drones and satellites. For a comprehensive assessment, it features 5,022 meticulously annotated multi-view QA pairs categorized into five cognitive dimensions and three spatial relation expressions. A comprehensive evaluation of 33 VLMs reveals a significant performance disparity with humans: even large-scale models struggle to exceed 54.1% accuracy, remaining 34.2% below human performance. By contrast, small-scale fine-tuned VLMs achieve over 60.0% accuracy, highlighting the necessity of our benchmark. Further analyses indicate the task correlations and fundamental cognitive disparity between VLMs and human-like reasoning.
Learn to Relax with Large Language Models: Solving Nonlinear Combinatorial Optimization Problems via Bidirectional Coevolution
Sep 16, 2025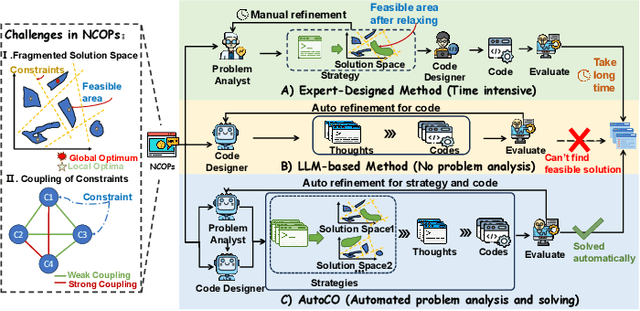



Nonlinear Combinatorial Optimization Problems (NCOPs) present a formidable computational hurdle in practice, as their nonconvex nature gives rise to multi-modal solution spaces that defy efficient optimization. Traditional constraint relaxation approaches rely heavily on expert-driven, iterative design processes that lack systematic automation and scalable adaptability. While recent Large Language Model (LLM)-based optimization methods show promise for autonomous problem-solving, they predominantly function as passive constraint validators rather than proactive strategy architects, failing to handle the sophisticated constraint interactions inherent to NCOPs.To address these limitations, we introduce the first end-to-end \textbf{Auto}mated \textbf{C}onstraint \textbf{O}ptimization (AutoCO) method, which revolutionizes NCOPs resolution through learning to relax with LLMs.Specifically, we leverage structured LLM reasoning to generate constraint relaxation strategies, which are dynamically evolving with algorithmic principles and executable code through a unified triple-representation scheme. We further establish a novel bidirectional (global-local) coevolution mechanism that synergistically integrates Evolutionary Algorithms for intensive local refinement with Monte Carlo Tree Search for systematic global strategy space exploration, ensuring optimal balance between intensification and diversification in fragmented solution spaces. Finally, comprehensive experiments on three challenging NCOP benchmarks validate AutoCO's consistent effectiveness and superior performance over the baselines.
A Comprehensive Survey on Underwater Acoustic Target Positioning and Tracking: Progress, Challenges, and Perspectives
Jun 17, 2025Underwater target tracking technology plays a pivotal role in marine resource exploration, environmental monitoring, and national defense security. Given that acoustic waves represent an effective medium for long-distance transmission in aquatic environments, underwater acoustic target tracking has become a prominent research area of underwater communications and networking. Existing literature reviews often offer a narrow perspective or inadequately address the paradigm shifts driven by emerging technologies like deep learning and reinforcement learning. To address these gaps, this work presents a systematic survey of this field and introduces an innovative multidimensional taxonomy framework based on target scale, sensor perception modes, and sensor collaboration patterns. Within this framework, we comprehensively survey the literature (more than 180 publications) over the period 2016-2025, spanning from the theoretical foundations to diverse algorithmic approaches in underwater acoustic target tracking. Particularly, we emphasize the transformative potential and recent advancements of machine learning techniques, including deep learning and reinforcement learning, in enhancing the performance and adaptability of underwater tracking systems. Finally, this survey concludes by identifying key challenges in the field and proposing future avenues based on emerging technologies such as federated learning, blockchain, embodied intelligence, and large models.
Psychology-driven LLM Agents for Explainable Panic Prediction on Social Media during Sudden Disaster Events
May 22, 2025During sudden disaster events, accurately predicting public panic sentiment on social media is crucial for proactive governance and crisis management. Current efforts on this problem face three main challenges: lack of finely annotated data hinders emotion prediction studies, unmodeled risk perception causes prediction inaccuracies, and insufficient interpretability of panic formation mechanisms. We address these issues by proposing a Psychology-driven generative Agent framework (PsychoAgent) for explainable panic prediction based on emotion arousal theory. Specifically, we first construct a fine-grained open panic emotion dataset (namely COPE) via human-large language models (LLMs) collaboration to mitigate semantic bias. Then, we develop a framework integrating cross-domain heterogeneous data grounded in psychological mechanisms to model risk perception and cognitive differences in emotion generation. To enhance interpretability, we design an LLM-based role-playing agent that simulates individual psychological chains through dedicatedly designed prompts. Experimental results on our annotated dataset show that PsychoAgent improves panic emotion prediction performance by 12.6% to 21.7% compared to baseline models. Furthermore, the explainability and generalization of our approach is validated. Crucially, this represents a paradigm shift from opaque "data-driven fitting" to transparent "role-based simulation with mechanistic interpretation" for panic emotion prediction during emergencies. Our implementation is publicly available at: https://anonymous.4open.science/r/PsychoAgent-19DD.
Towards Autonomous UAV Visual Object Search in City Space: Benchmark and Agentic Methodology
May 14, 2025Aerial Visual Object Search (AVOS) tasks in urban environments require Unmanned Aerial Vehicles (UAVs) to autonomously search for and identify target objects using visual and textual cues without external guidance. Existing approaches struggle in complex urban environments due to redundant semantic processing, similar object distinction, and the exploration-exploitation dilemma. To bridge this gap and support the AVOS task, we introduce CityAVOS, the first benchmark dataset for autonomous search of common urban objects. This dataset comprises 2,420 tasks across six object categories with varying difficulty levels, enabling comprehensive evaluation of UAV agents' search capabilities. To solve the AVOS tasks, we also propose PRPSearcher (Perception-Reasoning-Planning Searcher), a novel agentic method powered by multi-modal large language models (MLLMs) that mimics human three-tier cognition. Specifically, PRPSearcher constructs three specialized maps: an object-centric dynamic semantic map enhancing spatial perception, a 3D cognitive map based on semantic attraction values for target reasoning, and a 3D uncertainty map for balanced exploration-exploitation search. Also, our approach incorporates a denoising mechanism to mitigate interference from similar objects and utilizes an Inspiration Promote Thought (IPT) prompting mechanism for adaptive action planning. Experimental results on CityAVOS demonstrate that PRPSearcher surpasses existing baselines in both success rate and search efficiency (on average: +37.69% SR, +28.96% SPL, -30.69% MSS, and -46.40% NE). While promising, the performance gap compared to humans highlights the need for better semantic reasoning and spatial exploration capabilities in AVOS tasks. This work establishes a foundation for future advances in embodied target search. Dataset and source code are available at https://anonymous.4open.science/r/CityAVOS-3DF8.
DLW-CI: A Dynamic Likelihood-Weighted Cooperative Infotaxis Approach for Multi-Source Search in Urban Environments Using Consumer Drone Networks
Apr 19, 2025Consumer-grade drones equipped with low-cost sensors have emerged as a cornerstone of Autonomous Intelligent Systems (AISs) for environmental monitoring and hazardous substance detection in urban environments. However, existing research primarily addresses single-source search problems, overlooking the complexities of real-world urban scenarios where both the location and quantity of hazardous sources remain unknown. To address this issue, we propose the Dynamic Likelihood-Weighted Cooperative Infotaxis (DLW-CI) approach for consumer drone networks. Our approach enhances multi-drone collaboration in AISs by combining infotaxis (a cognitive search strategy) with optimized source term estimation and an innovative cooperative mechanism. Specifically, we introduce a novel source term estimation method that utilizes multiple parallel particle filters, with each filter dedicated to estimating the parameters of a potentially unknown source within the search scene. Furthermore, we develop a cooperative mechanism based on dynamic likelihood weights to prevent multiple drones from simultaneously estimating and searching for the same source, thus optimizing the energy efficiency and search coverage of the consumer AIS. Experimental results demonstrate that the DLW-CI approach significantly outperforms baseline methods regarding success rate, accuracy, and root mean square error, particularly in scenarios with relatively few sources, regardless of the presence of obstacles. Also, the effectiveness of the proposed approach is verified in a diffusion scenario generated by the computational fluid dynamics (CFD) model. Research findings indicate that our approach could improve source estimation accuracy and search efficiency by consumer drone-based AISs, making a valuable contribution to environmental safety monitoring applications within smart city infrastructure.
GeoNav: Empowering MLLMs with Explicit Geospatial Reasoning Abilities for Language-Goal Aerial Navigation
Apr 13, 2025Language-goal aerial navigation is a critical challenge in embodied AI, requiring UAVs to localize targets in complex environments such as urban blocks based on textual specification. Existing methods, often adapted from indoor navigation, struggle to scale due to limited field of view, semantic ambiguity among objects, and lack of structured spatial reasoning. In this work, we propose GeoNav, a geospatially aware multimodal agent to enable long-range navigation. GeoNav operates in three phases-landmark navigation, target search, and precise localization-mimicking human coarse-to-fine spatial strategies. To support such reasoning, it dynamically builds two different types of spatial memory. The first is a global but schematic cognitive map, which fuses prior textual geographic knowledge and embodied visual cues into a top-down, annotated form for fast navigation to the landmark region. The second is a local but delicate scene graph representing hierarchical spatial relationships between blocks, landmarks, and objects, which is used for definite target localization. On top of this structured representation, GeoNav employs a spatially aware, multimodal chain-of-thought prompting mechanism to enable multimodal large language models with efficient and interpretable decision-making across stages. On the CityNav urban navigation benchmark, GeoNav surpasses the current state-of-the-art by up to 12.53% in success rate and significantly improves navigation efficiency, even in hard-level tasks. Ablation studies highlight the importance of each module, showcasing how geospatial representations and coarse-to-fine reasoning enhance UAV navigation.
CityEQA: A Hierarchical LLM Agent on Embodied Question Answering Benchmark in City Space
Feb 20, 2025Embodied Question Answering (EQA) has primarily focused on indoor environments, leaving the complexities of urban settings - spanning environment, action, and perception - largely unexplored. To bridge this gap, we introduce CityEQA, a new task where an embodied agent answers open-vocabulary questions through active exploration in dynamic city spaces. To support this task, we present CityEQA-EC, the first benchmark dataset featuring 1,412 human-annotated tasks across six categories, grounded in a realistic 3D urban simulator. Moreover, we propose Planner-Manager-Actor (PMA), a novel agent tailored for CityEQA. PMA enables long-horizon planning and hierarchical task execution: the Planner breaks down the question answering into sub-tasks, the Manager maintains an object-centric cognitive map for spatial reasoning during the process control, and the specialized Actors handle navigation, exploration, and collection sub-tasks. Experiments demonstrate that PMA achieves 60.7% of human-level answering accuracy, significantly outperforming frontier-based baselines. While promising, the performance gap compared to humans highlights the need for enhanced visual reasoning in CityEQA. This work paves the way for future advancements in urban spatial intelligence. Dataset and code are available at https://github.com/BiluYong/CityEQA.git.
A Data-driven Crowd Simulation Framework Integrating Physics-informed Machine Learning with Navigation Potential Fields
Oct 21, 2024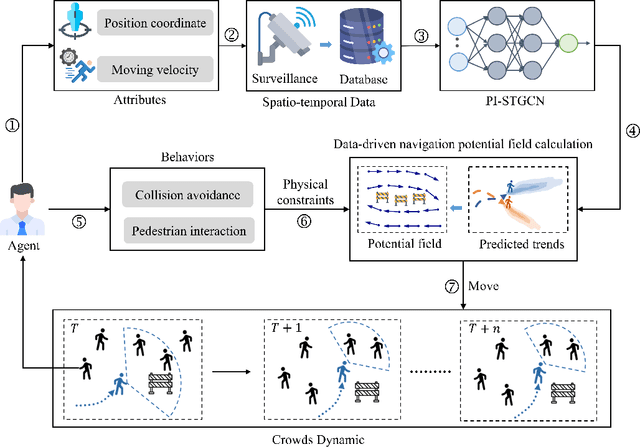
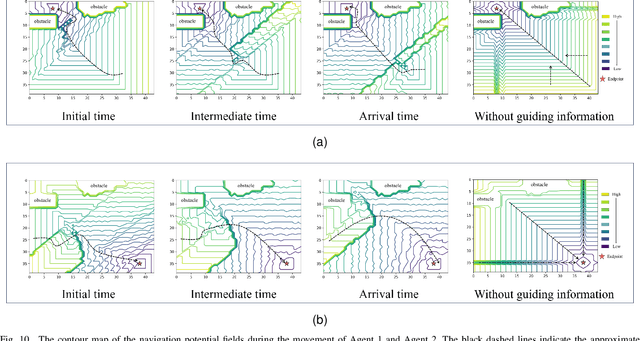

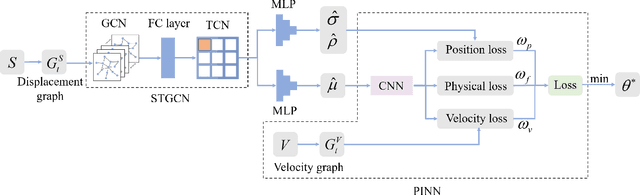
Traditional rule-based physical models are limited by their reliance on singular physical formulas and parameters, making it difficult to effectively tackle the intricate tasks associated with crowd simulation. Recent research has introduced deep learning methods to tackle these issues, but most current approaches focus primarily on generating pedestrian trajectories, often lacking interpretability and failing to provide real-time dynamic simulations.To address the aforementioned issues, we propose a novel data-driven crowd simulation framework that integrates Physics-informed Machine Learning (PIML) with navigation potential fields. Our approach leverages the strengths of both physical models and PIML. Specifically, we design an innovative Physics-informed Spatio-temporal Graph Convolutional Network (PI-STGCN) as a data-driven module to predict pedestrian movement trends based on crowd spatio-temporal data. Additionally, we construct a physical model of navigation potential fields based on flow field theory to guide pedestrian movements, thereby reinforcing physical constraints during the simulation. In our framework, navigation potential fields are dynamically computed and updated based on the movement trends predicted by the PI-STGCN, while the updated crowd dynamics, guided by these fields, subsequently feed back into the PI-STGCN. Comparative experiments on two publicly available large-scale real-world datasets across five scenes demonstrate that our proposed framework outperforms existing rule-based methods in accuracy and fidelity. The similarity between simulated and actual pedestrian trajectories increases by 10.8%, while the average error is reduced by 4%. Moreover, our framework exhibits greater adaptability and better interpretability compared to methods that rely solely on deep learning for trajectory generation.