 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDF-HR: Pose Distance Fields for Humanoid Robots
Feb 04, 2026Pose and motion priors play a crucial role in humanoid robotics. Although such priors have been widely studied in human motion recovery (HMR) domain with a range of models, their adoption for humanoid robots remains limited, largely due to the scarcity of high-quality humanoid motion data. In this work, we introduce Pose Distance Fields for Humanoid Robots (PDF-HR), a lightweight prior that represents the robot pose distribution as a continuous and differentiable manifold. Given an arbitrary pose, PDF-HR predicts its distance to a large corpus of retargeted robot poses, yielding a smooth measure of pose plausibility that is well suited for optimization and control. PDF-HR can be integrated as a reward shaping term, a regularizer, or a standalone plausibility scorer across diverse pipelines. We evaluate PDF-HR on various humanoid tasks, including single-trajectory motion tracking, general motion tracking, style-based motion mimicry, and general motion retargeting. Experiments show that this plug-and-play prior consistently and substantially strengthens strong baselines. Code and models will be released.
HERO: Hierarchical Traversable 3D Scene Graphs for Embodied Navigation Among Movable Obstacles
Dec 17, 20253D Scene Graphs (3DSGs) constitute a powerful representation of the physical world, distinguished by their abilities to explicitly model the complex spatial, semantic, and functional relationships between entities, rendering a foundational understanding that enables agents to interact intelligently with their environment and execute versatile behaviors. Embodied navigation, as a crucial component of such capabilities, leverages the compact and expressive nature of 3DSGs to enable long-horizon reasoning and planning in complex, large-scale environments. However, prior works rely on a static-world assumption, defining traversable space solely based on static spatial layouts and thereby treating interactable obstacles as non-traversable. This fundamental limitation severely undermines their effectiveness in real-world scenarios, leading to limited reachability, low efficiency, and inferior extensibility. To address these issues, we propose HERO, a novel framework for constructing Hierarchical Traversable 3DSGs, that redefines traversability by modeling operable obstacles as pathways, capturing their physical interactivity, functional semantics, and the scene's relational hierarchy. The results show that, relative to its baseline, HERO reduces PL by 35.1% in partially obstructed environments and increases SR by 79.4% in fully obstructed ones, demonstrating substantially higher efficiency and reachability.
Semi-distributed Cross-modal Air-Ground Relative Localization
Nov 10, 2025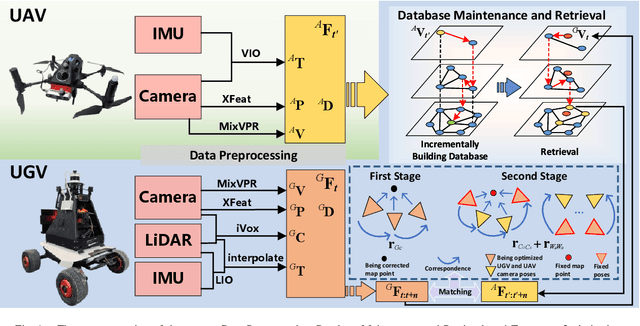
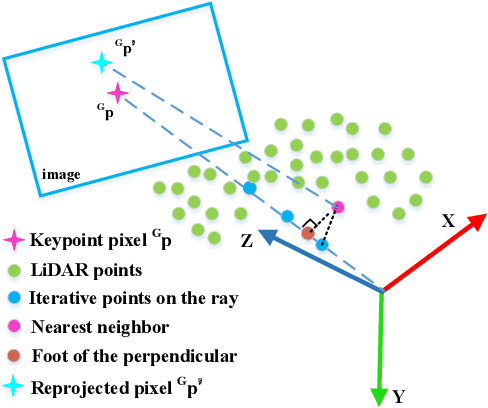

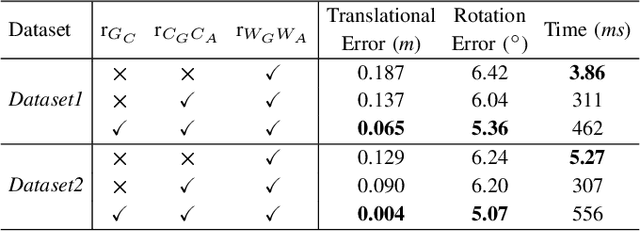
Efficient, accurate, and flexible relative localization is crucial in air-ground collaborative tasks. However, current approaches for robot relative localization are primarily realized in the form of distributed multi-robot SLAM systems with the same sensor configuration, which are tightly coupled with the state estimation of all robots, limiting both flexibility and accuracy. To this end, we fully leverage the high capacity of Unmanned Ground Vehicle (UGV) to integrate multiple sensors, enabling a semi-distributed cross-modal air-ground relative localization framework. In this work, both the UGV and the Unmanned Aerial Vehicle (UAV) independently perform SLAM while extracting deep learning-based keypoints and global descriptors, which decouples the relative localization from the state estimation of all agents. The UGV employs a local Bundle Adjustment (BA) with LiDAR, camera, and an IMU to rapidly obtain accurate relative pose estimates. The BA process adopts sparse keypoint optimization and is divided into two stages: First, optimizing camera poses interpolated from LiDAR-Inertial Odometry (LIO), followed by estimating the relative camera poses between the UGV and UAV. Additionally, we implement an incremental loop closure detection algorithm using deep learning-based descriptors to maintain and retrieve keyframes efficiently. Experimental results demonstrate that our method achieves outstanding performance in both accuracy and efficiency. Unlike traditional multi-robot SLAM approaches that transmit images or point clouds, our method only transmits keypoint pixels and their descriptors, effectively constraining the communication bandwidth under 0.3 Mbps. Codes and data will be publicly available on https://github.com/Ascbpiac/cross-model-relative-localization.git.
Robust and High-Fidelity 3D Gaussian Splatting: Fusing Pose Priors and Geometry Constraints for Texture-Deficient Outdoor Scenes
Nov 10, 20253D Gaussian Splatting (3DGS) has emerged as a key rendering pipeline for digital asset creation due to its balance between efficiency and visual quality. To address the issues of unstable pose estimation and scene representation distortion caused by geometric texture inconsistency in large outdoor scenes with weak or repetitive textures, we approach the problem from two aspects: pose estimation and scene representation. For pose estimation, we leverage LiDAR-IMU Odometry to provide prior poses for cameras in large-scale environments. These prior pose constraints are incorporated into COLMAP's triangulation process, with pose optimization performed via bundle adjustment. Ensuring consistency between pixel data association and prior poses helps maintain both robustness and accuracy. For scene representation, we introduce normal vector constraints and effective rank regularization to enforce consistency in the direction and shape of Gaussian primitives. These constraints are jointly optimized with the existing photometric loss to enhance the map quality. We evaluate our approach using both public and self-collected datasets. In terms of pose optimization, our method requires only one-third of the time while maintaining accuracy and robustness across both datasets. In terms of scene representation, the results show that our method significantly outperforms conventional 3DGS pipelines. Notably, on self-collected datasets characterized by weak or repetitive textures, our approach demonstrates enhanced visualization capabilities and achieves superior overall performance. Codes and data will be publicly available at https://github.com/justinyeah/normal_shape.git.
Block-Map-Based Localization in Large-Scale Environment
Apr 28, 2024Accurate localization is an essential technology for the flexible navigation of robots in large-scale environments. Both SLAM-based and map-based localization will increase the computing load due to the increase in map size, which will affect downstream tasks such as robot navigation and services. To this end, we propose a localization system based on Block Maps (BMs) to reduce the computational load caused by maintaining large-scale maps. Firstly, we introduce a method for generating block maps and the corresponding switching strategies, ensuring that the robot can estimate the state in large-scale environments by loading local map information. Secondly, global localization according to Branch-and-Bound Search (BBS) in the 3D map is introduced to provide the initial pose. Finally, a graph-based optimization method is adopted with a dynamic sliding window that determines what factors are being marginalized whether a robot is exposed to a BM or switching to another one, which maintains the accuracy and efficiency of pose tracking. Comparison experiments are performed on publicly available large-scale datasets. Results show that the proposed method can track the robot pose even though the map scale reaches more than 6 kilometers, while efficient and accurate localization is still guaranteed on NCLT and M2DGR.