 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDF-HR: Pose Distance Fields for Humanoid Robots
Feb 04, 2026Pose and motion priors play a crucial role in humanoid robotics. Although such priors have been widely studied in human motion recovery (HMR) domain with a range of models, their adoption for humanoid robots remains limited, largely due to the scarcity of high-quality humanoid motion data. In this work, we introduce Pose Distance Fields for Humanoid Robots (PDF-HR), a lightweight prior that represents the robot pose distribution as a continuous and differentiable manifold. Given an arbitrary pose, PDF-HR predicts its distance to a large corpus of retargeted robot poses, yielding a smooth measure of pose plausibility that is well suited for optimization and control. PDF-HR can be integrated as a reward shaping term, a regularizer, or a standalone plausibility scorer across diverse pipelines. We evaluate PDF-HR on various humanoid tasks, including single-trajectory motion tracking, general motion tracking, style-based motion mimicry, and general motion retargeting. Experiments show that this plug-and-play prior consistently and substantially strengthens strong baselines. Code and models will be released.
Super LiDAR Reflectance for Robotic Perception
Aug 14, 2025Conventionally, human intuition often defines vision as a modality of passive optical sensing, while active optical sensing is typically regarded as measuring rather than the default modality of vision. However, the situation now changes: sensor technologies and data-driven paradigms empower active optical sensing to redefine the boundaries of vision, ushering in a new era of active vision. Light Detection and Ranging (LiDAR) sensors capture reflectance from object surfaces, which remains invariant under varying illumination conditions, showcasing significant potential in robotic perception tasks such as detection, recognition, segmentation, and Simultaneous Localization and Mapping (SLAM). These applications often rely on dense sensing capabilities, typically achieved by high-resolution, expensive LiDAR sensors. A key challenge with low-cost LiDARs lies in the sparsity of scan data, which limits their broader application. To address this limitation, this work introduces an innovative framework for generating dense LiDAR reflectance images from sparse data, leveraging the unique attributes of non-repeating scanning LiDAR (NRS-LiDAR). We tackle critical challenges, including reflectance calibration and the transition from static to dynamic scene domains, facilitating the reconstruction of dense reflectance images in real-world settings. The key contributions of this work include a comprehensive dataset for LiDAR reflectance image densification, a densification network tailored for NRS-LiDAR, and diverse applications such as loop closure and traffic lane detection using the generated dense reflectance images.
Night-Voyager: Consistent and Efficient Nocturnal Vision-Aided State Estimation in Object Maps
Feb 27, 2025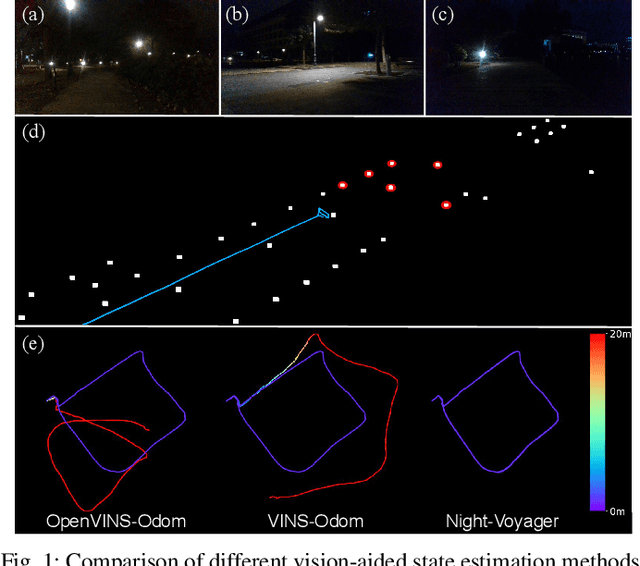
Accurate and robust state estimation at nighttime is essential for autonomous robotic navigation to achieve nocturnal or round-the-clock tasks. An intuitive question arises: Can low-cost standard cameras be exploited for nocturnal state estimation? Regrettably, most existing visual methods may fail under adverse illumination conditions, even with active lighting or image enhancement. A pivotal insight, however, is that streetlights in most urban scenarios act as stable and salient prior visual cues at night, reminiscent of stars in deep space aiding spacecraft voyage in interstellar navigation. Inspired by this, we propose Night-Voyager, an object-level nocturnal vision-aided state estimation framework that leverages prior object maps and keypoints for versatile localization. We also find that the primary limitation of conventional visual methods under poor lighting conditions stems from the reliance on pixel-level metrics. In contrast, metric-agnostic, non-pixel-level object detection serves as a bridge between pixel-level and object-level spaces, enabling effective propagation and utilization of object map information within the system. Night-Voyager begins with a fast initialization to solve the global localization problem. By employing an effective two-stage cross-modal data association, the system delivers globally consistent state updates using map-based observations. To address the challenge of significant uncertainties in visual observations at night, a novel matrix Lie group formulation and a feature-decoupled multi-state invariant filter are introduced, ensuring consistent and efficient estimation. Through comprehensive experiments in both simulation and diverse real-world scenarios (spanning approximately 12.3 km), Night-Voyager showcases its efficacy, robustness, and efficiency, filling a critical gap in nocturnal vision-aided state estimation.
Active Loop Closure for OSM-guided Robotic Mapping in Large-Scale Urban Environments
Jul 24, 2024



The autonomous mapping of large-scale urban scenes presents significant challenges for autonomous robots. To mitigate the challenges, global planning, such as utilizing prior GPS trajectories from OpenStreetMap (OSM), is often used to guide the autonomous navigation of robots for mapping. However, due to factors like complex terrain, unexpected body movement, and sensor noise, the uncertainty of the robot's pose estimates inevitably increases over time, ultimately leading to the failure of robotic mapping. To address this issue, we propose a novel active loop closure procedure, enabling the robot to actively re-plan the previously planned GPS trajectory. The method can guide the robot to re-visit the previous places where the loop-closure detection can be performed to trigger the back-end optimization, effectively reducing errors and uncertainties in pose estimation. The proposed active loop closure mechanism is implemented and embedded into a real-time OSM-guided robot mapping framework. Empirical results on several large-scale outdoor scenarios demonstrate its effectiveness and promising performance.
Night-Rider: Nocturnal Vision-aided Localization in Streetlight Maps Using Invariant Extended Kalman Filtering
Feb 01, 2024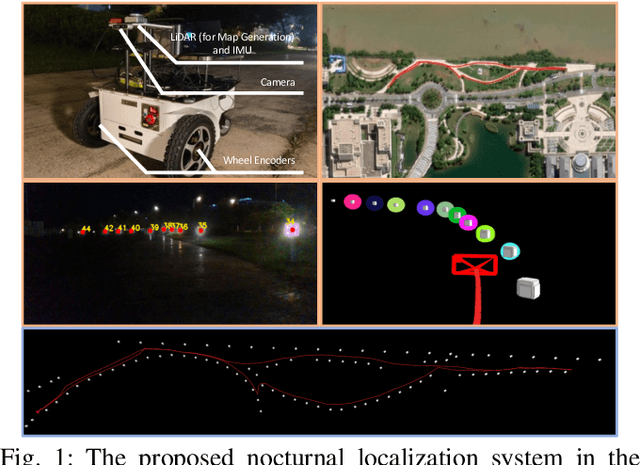
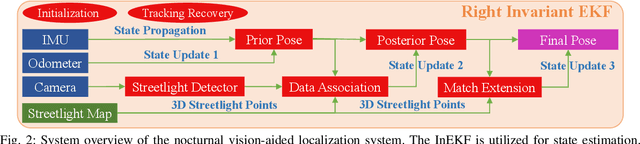
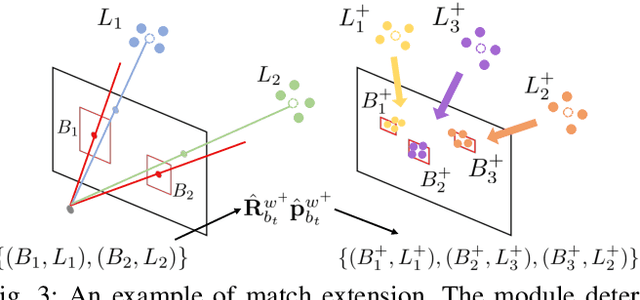
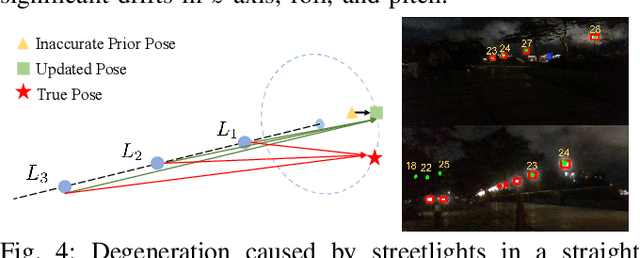
Vision-aided localization for low-cost mobile robots in diverse environments has attracted widespread attention recently. Although many current systems are applicable in daytime environments, nocturnal visual localization is still an open problem owing to the lack of stable visual information. An insight from most nocturnal scenes is that the static and bright streetlights are reliable visual information for localization. Hence we propose a nocturnal vision-aided localization system in streetlight maps with a novel data association and matching scheme using object detection methods. We leverage the Invariant Extended Kalman Filter (InEKF) to fuse IMU, odometer, and camera measurements for consistent state estimation at night. Furthermore, a tracking recovery module is also designed for tracking failures. Experiments on multiple real nighttime scenes validate that the system can achieve remarkably accurate and robust localization in nocturnal environments.