 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePDF-HR: Pose Distance Fields for Humanoid Robots
Feb 04, 2026Pose and motion priors play a crucial role in humanoid robotics. Although such priors have been widely studied in human motion recovery (HMR) domain with a range of models, their adoption for humanoid robots remains limited, largely due to the scarcity of high-quality humanoid motion data. In this work, we introduce Pose Distance Fields for Humanoid Robots (PDF-HR), a lightweight prior that represents the robot pose distribution as a continuous and differentiable manifold. Given an arbitrary pose, PDF-HR predicts its distance to a large corpus of retargeted robot poses, yielding a smooth measure of pose plausibility that is well suited for optimization and control. PDF-HR can be integrated as a reward shaping term, a regularizer, or a standalone plausibility scorer across diverse pipelines. We evaluate PDF-HR on various humanoid tasks, including single-trajectory motion tracking, general motion tracking, style-based motion mimicry, and general motion retargeting. Experiments show that this plug-and-play prior consistently and substantially strengthens strong baselines. Code and models will be released.
Hunyuan3D Studio: End-to-End AI Pipeline for Game-Ready 3D Asset Generation
Sep 16, 2025



The creation of high-quality 3D assets, a cornerstone of modern game development, has long been characterized by labor-intensive and specialized workflows. This paper presents Hunyuan3D Studio, an end-to-end AI-powered content creation platform designed to revolutionize the game production pipeline by automating and streamlining the generation of game-ready 3D assets. At its core, Hunyuan3D Studio integrates a suite of advanced neural modules (such as Part-level 3D Generation, Polygon Generation, Semantic UV, etc.) into a cohesive and user-friendly system. This unified framework allows for the rapid transformation of a single concept image or textual description into a fully-realized, production-quality 3D model complete with optimized geometry and high-fidelity PBR textures. We demonstrate that assets generated by Hunyuan3D Studio are not only visually compelling but also adhere to the stringent technical requirements of contemporary game engines, significantly reducing iteration time and lowering the barrier to entry for 3D content creation. By providing a seamless bridge from creative intent to technical asset, Hunyuan3D Studio represents a significant leap forward for AI-assisted workflows in game development and interactive media.
Taming VR Teleoperation and Learning from Demonstration for Multi-Task Bimanual Table Service Manipulation
Aug 21, 2025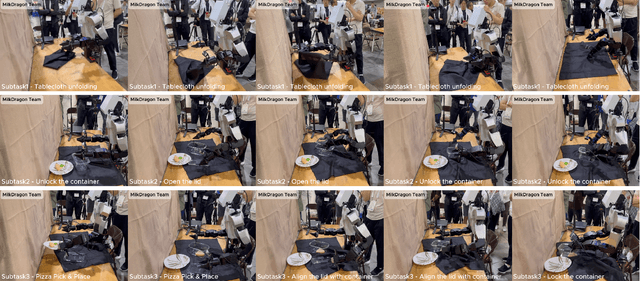
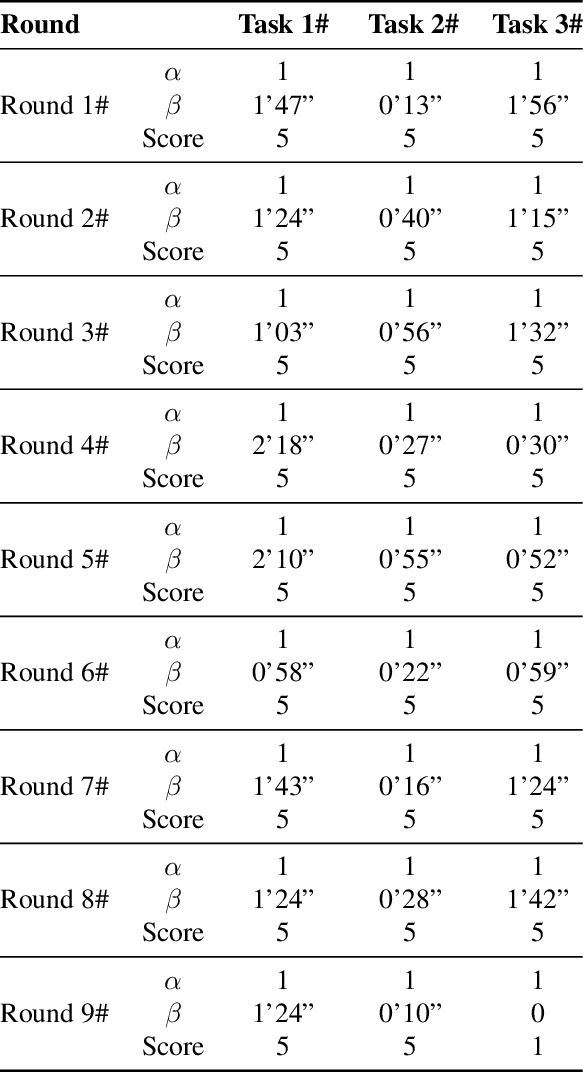
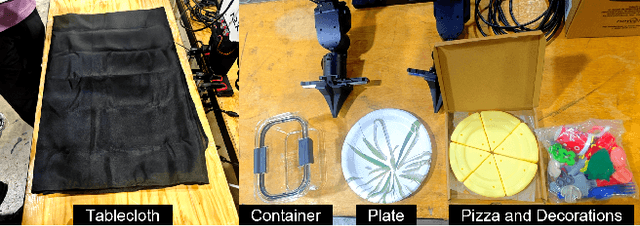
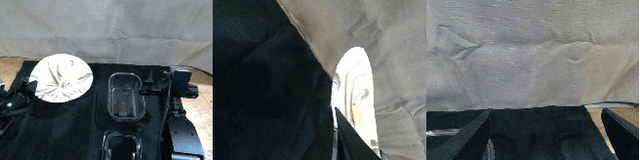
This technical report presents the champion solution of the Table Service Track in the ICRA 2025 What Bimanuals Can Do (WBCD) competition. We tackled a series of demanding tasks under strict requirements for speed, precision, and reliability: unfolding a tablecloth (deformable-object manipulation), placing a pizza into the container (pick-and-place), and opening and closing a food container with the lid. Our solution combines VR-based teleoperation and Learning from Demonstrations (LfD) to balance robustness and autonomy. Most subtasks were executed through high-fidelity remote teleoperation, while the pizza placement was handled by an ACT-based policy trained from 100 in-person teleoperated demonstrations with randomized initial configurations. By carefully integrating scoring rules, task characteristics, and current technical capabilities, our approach achieved both high efficiency and reliability, ultimately securing the first place in the competition.
Auto-Connect: Connectivity-Preserving RigFormer with Direct Preference Optimization
Jun 13, 2025



We introduce Auto-Connect, a novel approach for automatic rigging that explicitly preserves skeletal connectivity through a connectivity-preserving tokenization scheme. Unlike previous methods that predict bone positions represented as two joints or first predict points before determining connectivity, our method employs special tokens to define endpoints for each joint's children and for each hierarchical layer, effectively automating connectivity relationships. This approach significantly enhances topological accuracy by integrating connectivity information directly into the prediction framework. To further guarantee high-quality topology, we implement a topology-aware reward function that quantifies topological correctness, which is then utilized in a post-training phase through reward-guided Direct Preference Optimization. Additionally, we incorporate implicit geodesic features for latent top-k bone selection, which substantially improves skinning quality. By leveraging geodesic distance information within the model's latent space, our approach intelligently determines the most influential bones for each vertex, effectively mitigating common skinning artifacts. This combination of connectivity-preserving tokenization, reward-guided fine-tuning, and geodesic-aware bone selection enables our model to consistently generate more anatomically plausible skeletal structures with superior deformation properties.
DexFlow: A Unified Approach for Dexterous Hand Pose Retargeting and Interaction
May 02, 2025Despite advances in hand-object interaction modeling, generating realistic dexterous manipulation data for robotic hands remains a challenge. Retargeting methods often suffer from low accuracy and fail to account for hand-object interactions, leading to artifacts like interpenetration. Generative methods, lacking human hand priors, produce limited and unnatural poses. We propose a data transformation pipeline that combines human hand and object data from multiple sources for high-precision retargeting. Our approach uses a differential loss constraint to ensure temporal consistency and generates contact maps to refine hand-object interactions. Experiments show our method significantly improves pose accuracy, naturalness, and diversity, providing a robust solution for hand-object interaction modeling.
DexSinGrasp: Learning a Unified Policy for Dexterous Object Singulation and Grasping in Cluttered Environments
Apr 06, 2025Grasping objects in cluttered environments remains a fundamental yet challenging problem in robotic manipulation. While prior works have explored learning-based synergies between pushing and grasping for two-fingered grippers, few have leveraged the high degrees of freedom (DoF) in dexterous hands to perform efficient singulation for grasping in cluttered settings. In this work, we introduce DexSinGrasp, a unified policy for dexterous object singulation and grasping. DexSinGrasp enables high-dexterity object singulation to facilitate grasping, significantly improving efficiency and effectiveness in cluttered environments. We incorporate clutter arrangement curriculum learning to enhance success rates and generalization across diverse clutter conditions, while policy distillation enables a deployable vision-based grasping strategy. To evaluate our approach, we introduce a set of cluttered grasping tasks with varying object arrangements and occlusion levels. Experimental results show that our method outperforms baselines in both efficiency and grasping success rate, particularly in dense clutter. Codes, appendix, and videos are available on our project website https://nus-lins-lab.github.io/dexsingweb/.
Hunyuan3D 2.0: Scaling Diffusion Models for High Resolution Textured 3D Assets Generation
Jan 21, 2025



We present Hunyuan3D 2.0, an advanced large-scale 3D synthesis system for generating high-resolution textured 3D assets. This system includes two foundation components: a large-scale shape generation model -- Hunyuan3D-DiT, and a large-scale texture synthesis model -- Hunyuan3D-Paint. The shape generative model, built on a scalable flow-based diffusion transformer, aims to create geometry that properly aligns with a given condition image, laying a solid foundation for downstream applications. The texture synthesis model, benefiting from strong geometric and diffusion priors, produces high-resolution and vibrant texture maps for either generated or hand-crafted meshes. Furthermore, we build Hunyuan3D-Studio -- a versatile, user-friendly production platform that simplifies the re-creation process of 3D assets. It allows both professional and amateur users to manipulate or even animate their meshes efficiently. We systematically evaluate our models, showing that Hunyuan3D 2.0 outperforms previous state-of-the-art models, including the open-source models and closed-source models in geometry details, condition alignment, texture quality, and etc. Hunyuan3D 2.0 is publicly released in order to fill the gaps in the open-source 3D community for large-scale foundation generative models. The code and pre-trained weights of our models are available at: https://github.com/Tencent/Hunyuan3D-2