 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinPercep-RM: A Fine-grained Reward Model and Co-evolutionary Curriculum for RL-based Real-world Super-Resolution
Dec 27, 2025Reinforcement Learning with Human Feedback (RLHF) has proven effective in image generation field guided by reward models to align human preferences. Motivated by this, adapting RLHF for Image Super-Resolution (ISR) tasks has shown promise in optimizing perceptual quality with Image Quality Assessment (IQA) model as reward models. However, the traditional IQA model usually output a single global score, which are exceptionally insensitive to local and fine-grained distortions. This insensitivity allows ISR models to produce perceptually undesirable artifacts that yield spurious high scores, misaligning optimization objectives with perceptual quality and results in reward hacking. To address this, we propose a Fine-grained Perceptual Reward Model (FinPercep-RM) based on an Encoder-Decoder architecture. While providing a global quality score, it also generates a Perceptual Degradation Map that spatially localizes and quantifies local defects. We specifically introduce the FGR-30k dataset to train this model, consisting of diverse and subtle distortions from real-world super-resolution models. Despite the success of the FinPercep-RM model, its complexity introduces significant challenges in generator policy learning, leading to training instability. To address this, we propose a Co-evolutionary Curriculum Learning (CCL) mechanism, where both the reward model and the ISR model undergo synchronized curricula. The reward model progressively increases in complexity, while the ISR model starts with a simpler global reward for rapid convergence, gradually transitioning to the more complex model outputs. This easy-to-hard strategy enables stable training while suppressing reward hacking. Experiments validates the effectiveness of our method across ISR models in both global quality and local realism on RLHF methods.
Omni-Weather: Unified Multimodal Foundation Model for Weather Generation and Understanding
Dec 25, 2025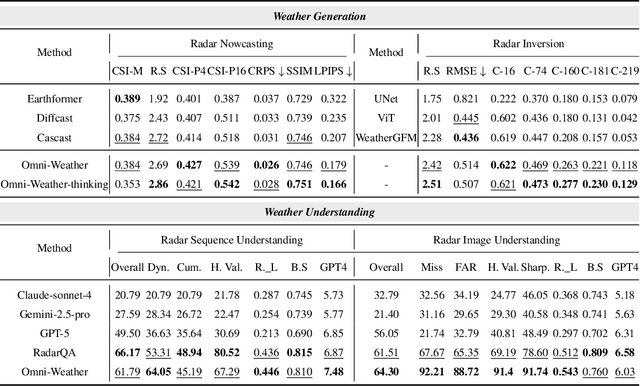
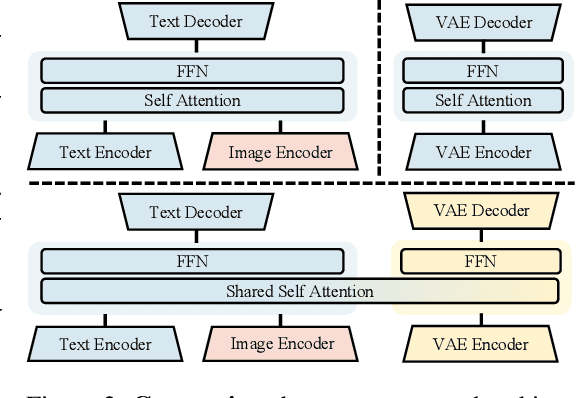
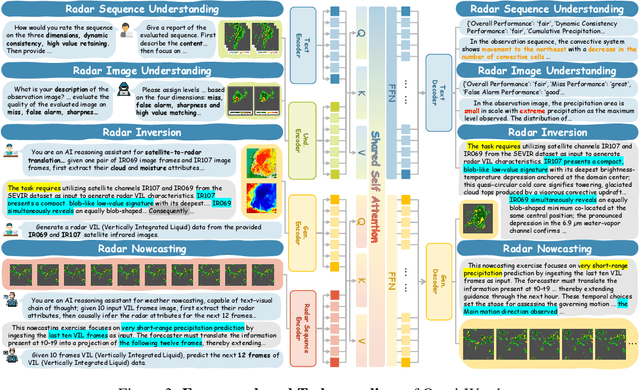
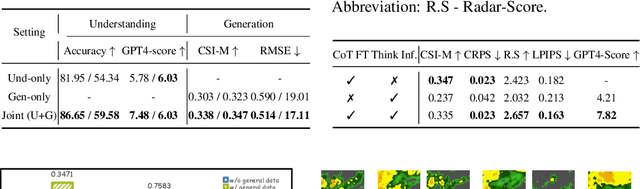
Weather modeling requires both accurate prediction and mechanistic interpretation, yet existing methods treat these goals in isolation, separating generation from understanding. To address this gap, we present Omni-Weather, the first multimodal foundation model that unifies weather generation and understanding within a single architecture. Omni-Weather integrates a radar encoder for weather generation tasks, followed by unified processing using a shared self-attention mechanism. Moreover, we construct a Chain-of-Thought dataset for causal reasoning in weather generation, enabling interpretable outputs and improved perceptual quality. Extensive experiments show Omni-Weather achieves state-of-the-art performance in both weather generation and understanding. Our findings further indicate that generative and understanding tasks in the weather domain can mutually enhance each other. Omni-Weather also demonstrates the feasibility and value of unifying weather generation and understanding.
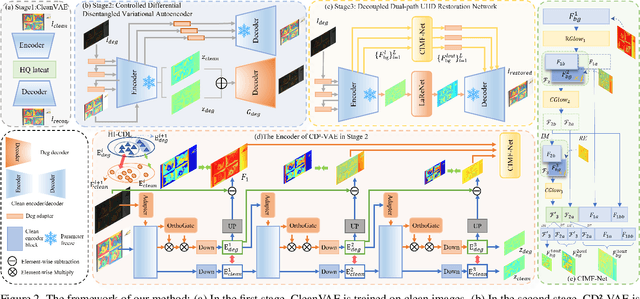
Latent Harmony: Synergistic Unified UHD Image Restoration via Latent Space Regularization and Controllable Refinement
Oct 09, 2025



Ultra-High Definition (UHD) image restoration faces a trade-off between computational efficiency and high-frequency detail retention. While Variational Autoencoders (VAEs) improve efficiency via latent-space processing, their Gaussian constraint often discards degradation-specific high-frequency information, hurting reconstruction fidelity. To overcome this, we propose Latent Harmony, a two-stage framework that redefines VAEs for UHD restoration by jointly regularizing the latent space and enforcing high-frequency-aware reconstruction.In Stage One, we introduce LH-VAE, which enhances semantic robustness through visual semantic constraints and progressive degradation perturbations, while latent equivariance strengthens high-frequency reconstruction.Stage Two jointly trains this refined VAE with a restoration model using High-Frequency Low-Rank Adaptation (HF-LoRA): an encoder LoRA guided by a fidelity-oriented high-frequency alignment loss to recover authentic details, and a decoder LoRA driven by a perception-oriented loss to synthesize realistic textures. Both LoRA modules are trained via alternating optimization with selective gradient propagation to preserve the pretrained latent structure.At inference, a tunable parameter {\alpha} enables flexible fidelity-perception trade-offs.Experiments show Latent Harmony achieves state-of-the-art performance across UHD and standard-resolution tasks, effectively balancing efficiency, perceptual quality, and reconstruction accuracy.
NTIRE 2025 Challenge on Event-Based Image Deblurring: Methods and Results
Apr 16, 2025This paper presents an overview of NTIRE 2025 the First Challenge on Event-Based Image Deblurring, detailing the proposed methodologies and corresponding results. The primary goal of the challenge is to design an event-based method that achieves high-quality image deblurring, with performance quantitatively assessed using Peak Signal-to-Noise Ratio (PSNR). Notably, there are no restrictions on computational complexity or model size. The task focuses on leveraging both events and images as inputs for single-image deblurring. A total of 199 participants registered, among whom 15 teams successfully submitted valid results, offering valuable insights into the current state of event-based image deblurring. We anticipate that this challenge will drive further advancements in event-based vision research.
Decouple to Reconstruct: High Quality UHD Restoration via Active Feature Disentanglement and Reversible Fusion
Mar 17, 2025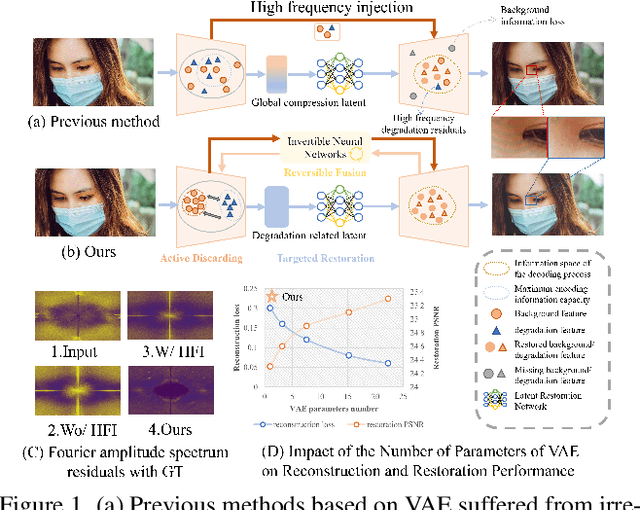

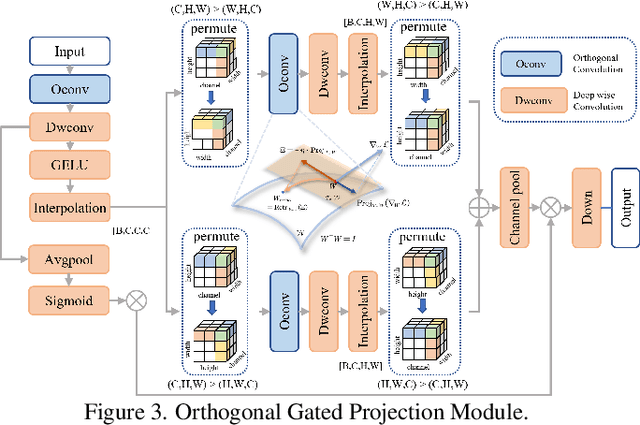
Ultra-high-definition (UHD) image restoration often faces computational bottlenecks and information loss due to its extremely high resolution. Existing studies based on Variational Autoencoders (VAE) improve efficiency by transferring the image restoration process from pixel space to latent space. However, degraded components are inherently coupled with background elements in degraded images, both information loss during compression and information gain during compensation remain uncontrollable. These lead to restored images often exhibiting image detail loss and incomplete degradation removal. To address this issue, we propose a Controlled Differential Disentangled VAE, which utilizes Hierarchical Contrastive Disentanglement Learning and an Orthogonal Gated Projection Module to guide the VAE to actively discard easily recoverable background information while encoding more difficult-to-recover degraded information into the latent space. Additionally, we design a Complex Invertible Multiscale Fusion Network to handle background features, ensuring their consistency, and utilize a latent space restoration network to transform the degraded latent features, leading to more accurate restoration results. Extensive experimental results demonstrate that our method effectively alleviates the information loss problem in VAE models while ensuring computational efficiency, significantly improving the quality of UHD image restoration, and achieves state-of-the-art results in six UHD restoration tasks with only 1M parameters.
FourierMamba: Fourier Learning Integration with State Space Models for Image Deraining
May 29, 2024



Image deraining aims to remove rain streaks from rainy images and restore clear backgrounds. Currently, some research that employs the Fourier transform has proved to be effective for image deraining, due to it acting as an effective frequency prior for capturing rain streaks. However, despite there exists dependency of low frequency and high frequency in images, these Fourier-based methods rarely exploit the correlation of different frequencies for conjuncting their learning procedures, limiting the full utilization of frequency information for image deraining. Alternatively, the recently emerged Mamba technique depicts its effectiveness and efficiency for modeling correlation in various domains (e.g., spatial, temporal), and we argue that introducing Mamba into its unexplored Fourier spaces to correlate different frequencies would help improve image deraining. This motivates us to propose a new framework termed FourierMamba, which performs image deraining with Mamba in the Fourier space. Owning to the unique arrangement of frequency orders in Fourier space, the core of FourierMamba lies in the scanning encoding of different frequencies, where the low-high frequency order formats exhibit differently in the spatial dimension (unarranged in axis) and channel dimension (arranged in axis). Therefore, we design FourierMamba that correlates Fourier space information in the spatial and channel dimensions with distinct designs. Specifically, in the spatial dimension Fourier space, we introduce the zigzag coding to scan the frequencies to rearrange the orders from low to high frequencies, thereby orderly correlating the connections between frequencies; in the channel dimension Fourier space with arranged orders of frequencies in axis, we can directly use Mamba to perform frequency correlation and improve the channel information representation.
Learning and Generalizing Motion Primitives from Driving Data for Path-Tracking Applications
Jun 02, 2018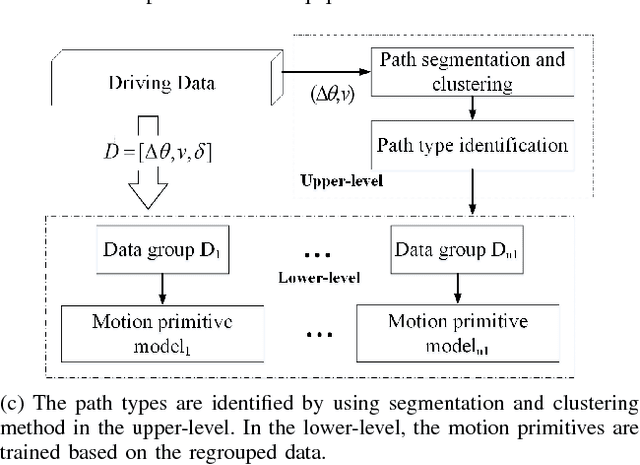
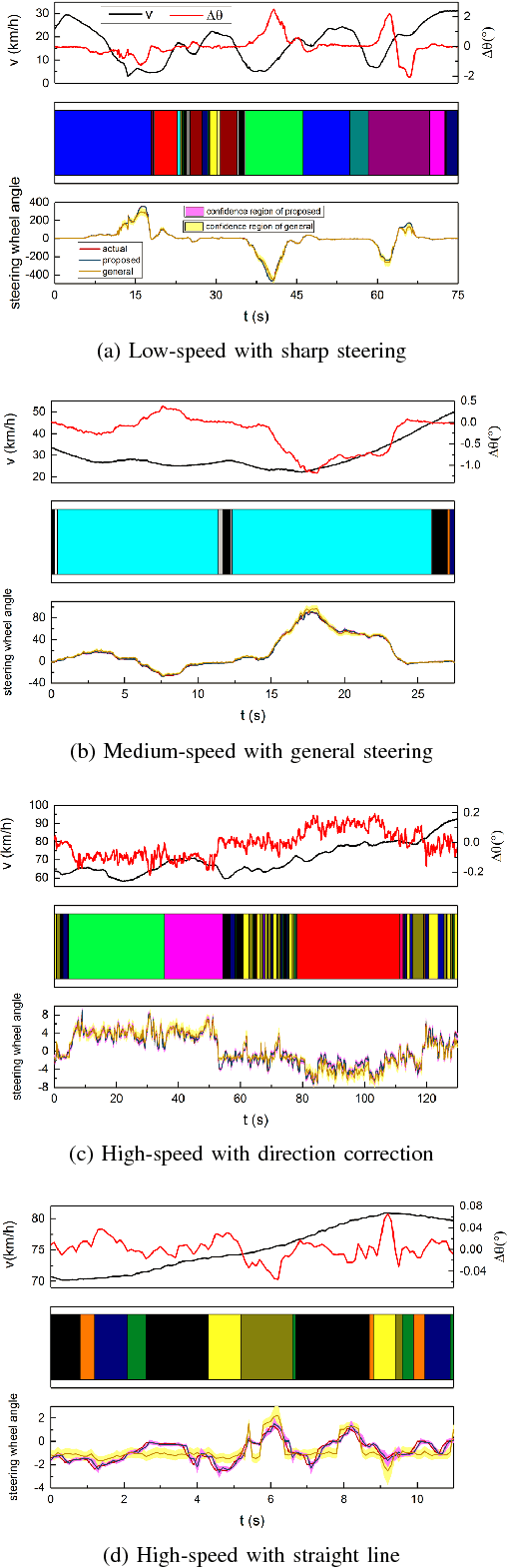
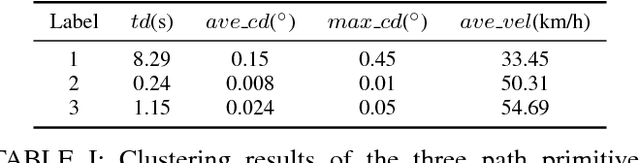
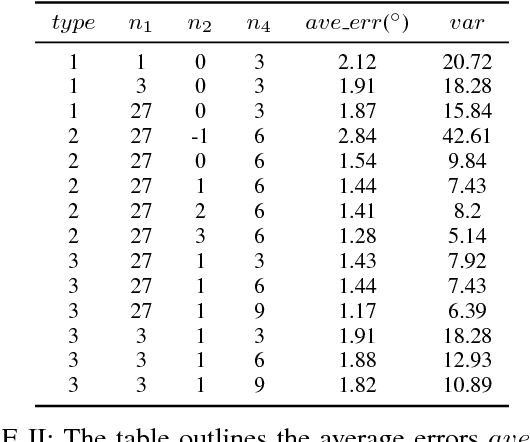
Considering the driving habits which are learned from the naturalistic driving data in the path-tracking system can significantly improve the acceptance of intelligent vehicles. Therefore, the goal of this paper is to generate the prediction results of lateral commands with confidence regions according to the reference based on the learned motion primitives. We present a two-level structure for learning and generalizing motion primitives through demonstrations. The lower-level motion primitives are generated under the path segmentation and clustering layer in the upper-level. The Gaussian Mixture Model(GMM) is utilized to represent the primitives and Gaussian Mixture Regression (GMR) is selected to generalize the motion primitives. We show how the upper-level can help to improve the prediction accuracy and evaluate the influence of different time scales and the number of Gaussian components. The model is trained and validated by using the driving data collected from the Beijing Institute of Technology (BIT) intelligent vehicle platform. Experiment results show that the proposed method can extract the motion primitives from the driving data and predict the future lateral control commands with high accuracy.