 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical Multi-Vehicle Coordinated Motion Planning Method based on Interactive Spatio-Temporal Corridors
Apr 03, 2023



Multi-vehicle coordinated motion planning has always been challenged to safely and efficiently resolve conflicts under non-holonomic dynamic constraints. Constructing spatial-temporal corridors for multi-vehicle can decouple the high-dimensional conflicts and further reduce the difficulty of obtaining feasible trajectories. Therefore, this paper proposes a novel hierarchical method based on interactive spatio-temporal corridors (ISTCs). In the first layer, based on the initial guidance trajectories, Mixed Integer Quadratic Programming is designed to construct ISTCs capable of resolving conflicts in generic multi-vehicle scenarios. And then in the second layer, Non-Linear Programming is settled to generate in-corridor trajectories that satisfy the vehicle dynamics. By introducing ISTCs, the multi-vehicle coordinated motion planning problem is able to be decoupled into single-vehicle trajectory optimization problems, which greatly decentralizes the computational pressure and has great potential for real-world applications. Besides, the proposed method searches for feasible solutions in the 3-D $(x,y,t)$ configuration space, preserving more possibilities than the traditional velocity-path decoupling method. Simulated experiments in unsignalized intersection and challenging dense scenarios have been conduced to verify the feasibility and adaptability of the proposed framework.
Dehazed Image Quality Evaluation: From Partial Discrepancy to Blind Perception
Nov 22, 2022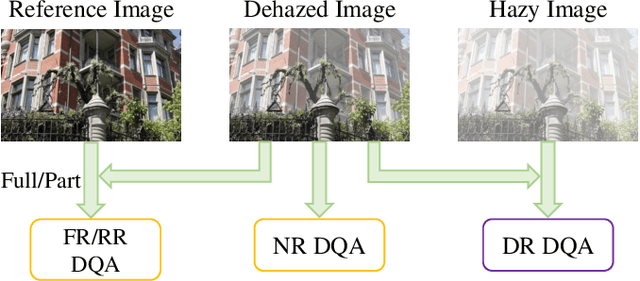
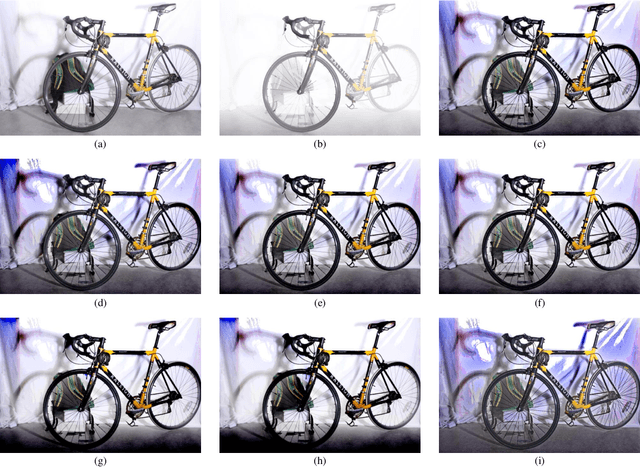

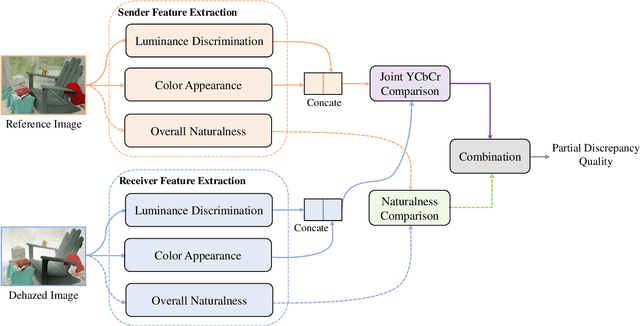
Image dehazing aims to restore spatial details from hazy images. There have emerged a number of image dehazing algorithms, designed to increase the visibility of those hazy images. However, much less work has been focused on evaluating the visual quality of dehazed images. In this paper, we propose a Reduced-Reference dehazed image quality evaluation approach based on Partial Discrepancy (RRPD) and then extend it to a No-Reference quality assessment metric with Blind Perception (NRBP). Specifically, inspired by the hierarchical characteristics of the human perceiving dehazed images, we introduce three groups of features: luminance discrimination, color appearance, and overall naturalness. In the proposed RRPD, the combined distance between a set of sender and receiver features is adopted to quantify the perceptually dehazed image quality. By integrating global and local channels from dehazed images, the RRPD is converted to NRBP which does not rely on any information from the references. Extensive experiment results on several dehazed image quality databases demonstrate that our proposed methods outperform state-of-the-art full-reference, reduced-reference, and no-reference quality assessment models. Furthermore, we show that the proposed dehazed image quality evaluation methods can be effectively applied to tune parameters for potential image dehazing algorithms.
Regeneration and Joining of the Learned Motion Primitives for Automated Vehicle Motion Planning Applications
Jul 04, 2019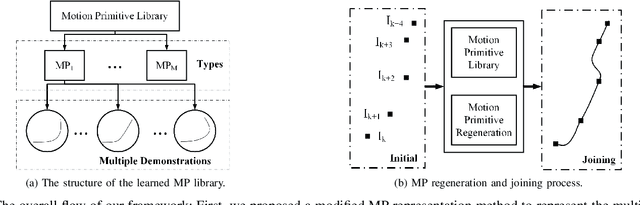
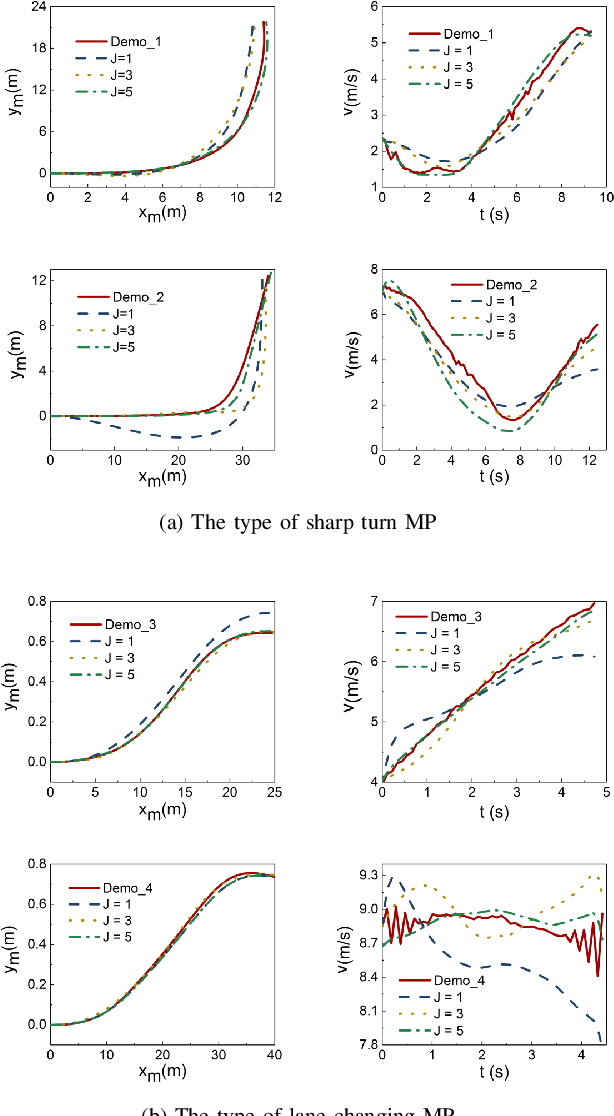
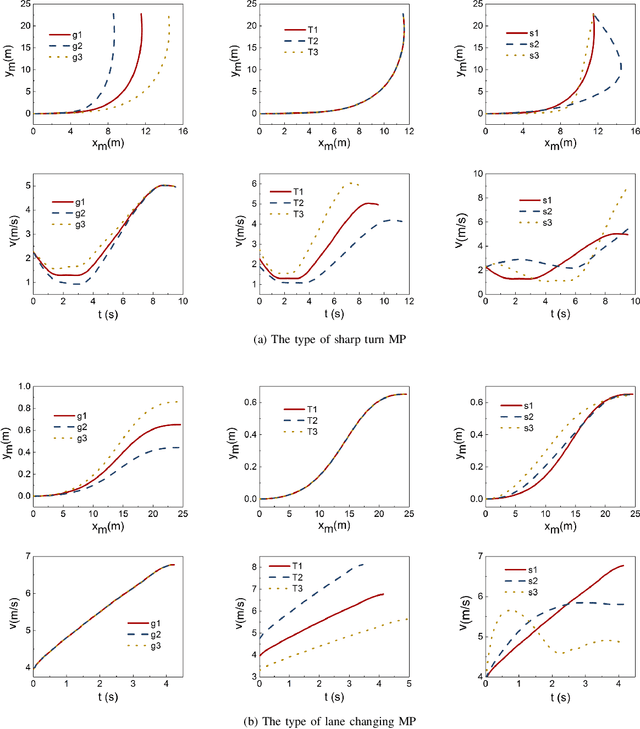

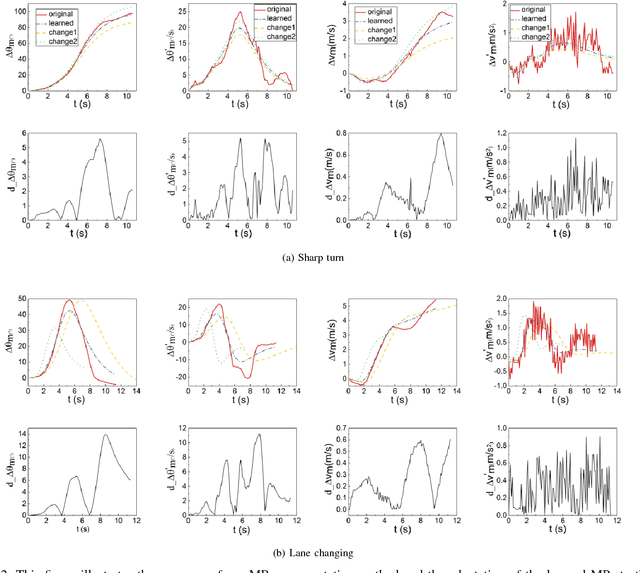
How to integrate human factors into the motion planning system is of great significance for improving the acceptance of intelligent vehicles. Decomposing motion into primitives and then accurately and smoothly joining the motion primitives (MPs) is an essential issue in the motion planning system. Therefore, the purpose of this paper is to regenerate and join the learned MPs in the library. By applying a representation algorithm based on the modified dynamic movement primitives (DMPs) and singular value decomposition (SVD), our method separates the basic shape parameters and fine-tuning shape parameters from the same type of demonstration trajectories in the MP library. Moreover, we convert the MP joining problem into a re-representation problem and use the characteristics of the proposed representation algorithm to achieve an accurate and smooth transition. This paper demonstrates that the proposed method can effectively reduce the number of shape adjustment parameters when the MPs are regenerated without affecting the accuracy of the representation. Besides, we also present the ability of the proposed method to smooth the velocity jump when the MPs are connected and evaluate its effect on the accuracy of tracking the set target points. The results show that the proposed method can not only improve the adjustment ability of a single MP in response to different motion planning requirements but also meet the basic requirements of MP joining in the generation of MP sequences.
Learning to Segment and Represent Motion Primitives from Driving Data for Motion Planning Applications
Sep 17, 2018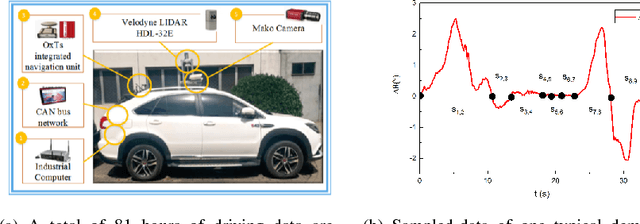


Developing an intelligent vehicle which can perform human-like actions requires the ability to learn basic driving skills from a large amount of naturalistic driving data. The algorithms will become efficient if we could decompose the complex driving tasks into motion primitives which represent the elementary compositions of driving skills. Therefore, the purpose of this paper is to segment unlabeled trajectory data into a library of motion primitives. By applying a probabilistic inference based on an iterative Expectation-Maximization algorithm, our method segments the collected trajectories while learning a set of motion primitives represented by the dynamic movement primitives. The proposed method utilizes the mutual dependencies between the segmentation and representation of motion primitives and the driving-specific based initial segmentation. By utilizing this mutual dependency and the initial condition, this paper presents how we can enhance the performance of both the segmentation and the motion primitive library establishment. We also evaluate the applicability of the primitive representation method to imitation learning and motion planning algorithms. The model is trained and validated by using the driving data collected from the Beijing Institute of Technology intelligent vehicle platform. The results show that the proposed approach can find the proper segmentation and establish the motion primitive library simultaneously.
Learning and Generalizing Motion Primitives from Driving Data for Path-Tracking Applications
Jun 02, 2018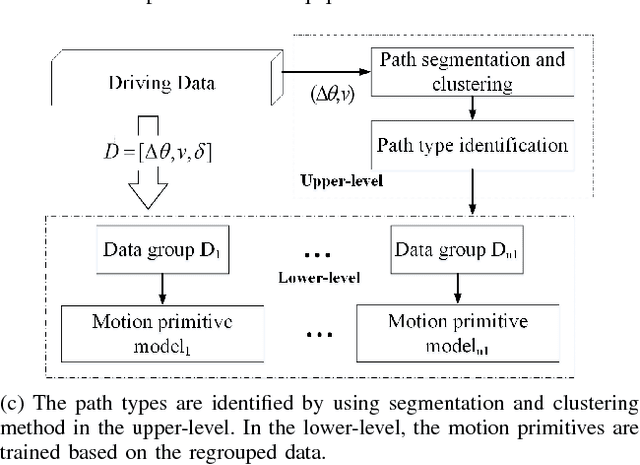
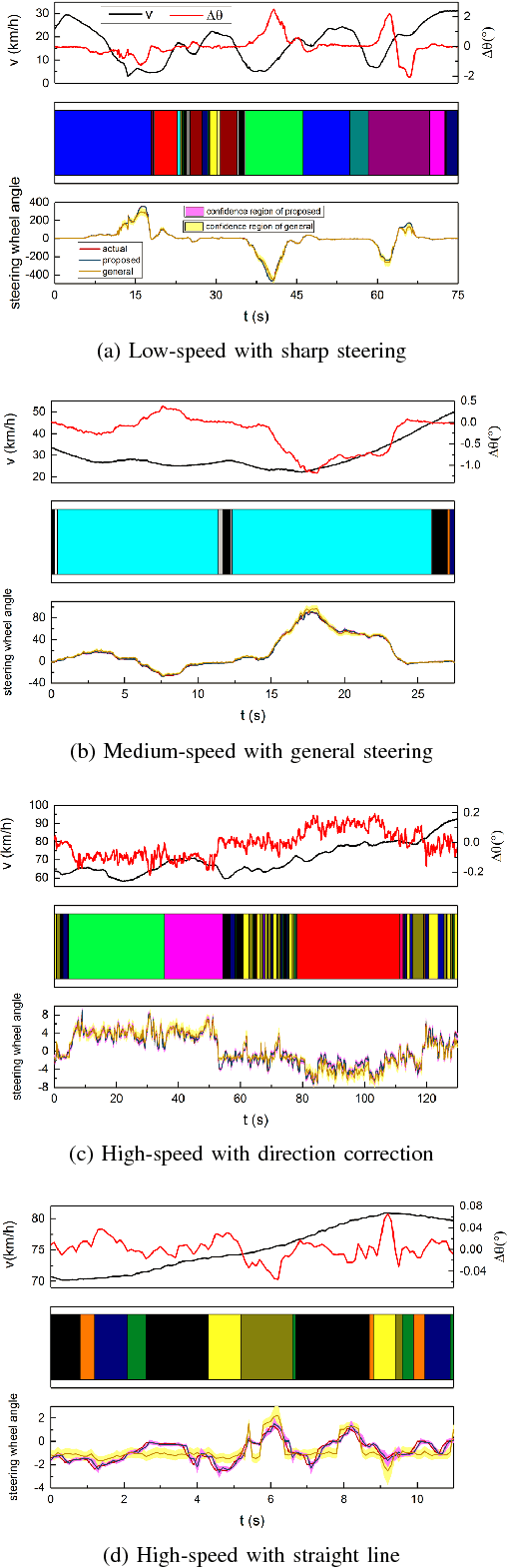
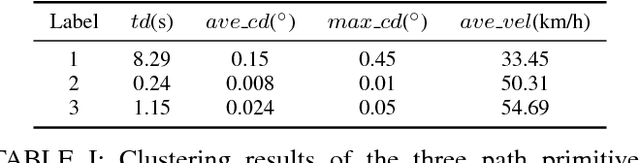
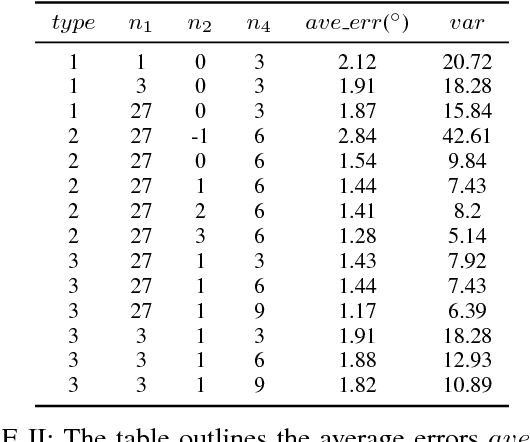
Considering the driving habits which are learned from the naturalistic driving data in the path-tracking system can significantly improve the acceptance of intelligent vehicles. Therefore, the goal of this paper is to generate the prediction results of lateral commands with confidence regions according to the reference based on the learned motion primitives. We present a two-level structure for learning and generalizing motion primitives through demonstrations. The lower-level motion primitives are generated under the path segmentation and clustering layer in the upper-level. The Gaussian Mixture Model(GMM) is utilized to represent the primitives and Gaussian Mixture Regression (GMR) is selected to generalize the motion primitives. We show how the upper-level can help to improve the prediction accuracy and evaluate the influence of different time scales and the number of Gaussian components. The model is trained and validated by using the driving data collected from the Beijing Institute of Technology (BIT) intelligent vehicle platform. Experiment results show that the proposed method can extract the motion primitives from the driving data and predict the future lateral control commands with high accuracy.
VPH+ and MPC Combined Collision Avoidance for Unmanned Ground Vehicle in Unknown Environment
May 21, 2018

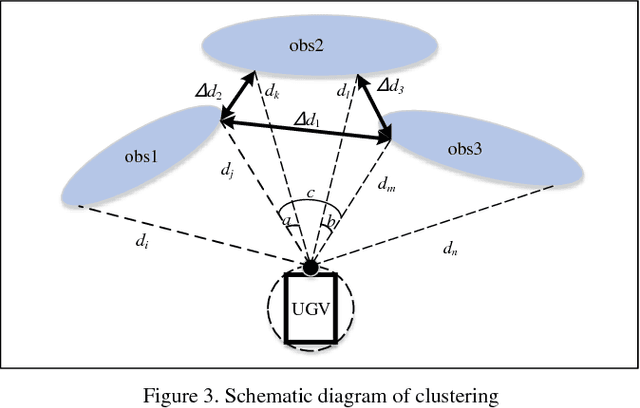
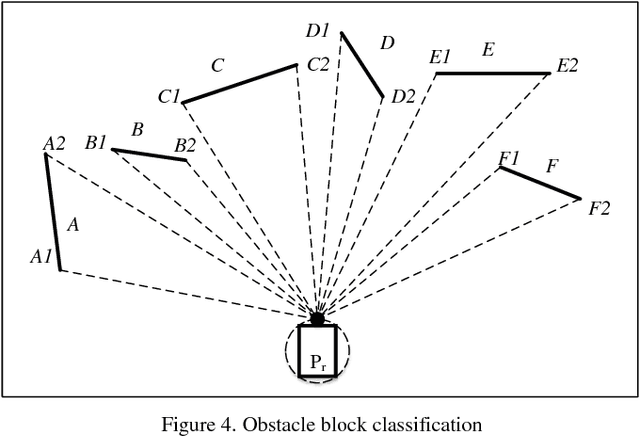
There are many situations for which an unmanned ground vehicle has to work with only partial observability of the environment. Therefore, a feasible nonholonomic obstacle avoidance and target tracking action must be generated immediately based on the real-time perceptual information. This paper presents a robust approach to integrating VPH+ (enhanced vector polar histogram) and MPC (model predictive control). VPH+ is applied to calculate the desired direction for its environment perception ability and computational efficiency, while MPC is explored to perform a constrained model-predictive trajectory generation. This approach can be implemented in a reactive controller. Simulation experiments are performed in VREP to validate the proposed approach.