 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReduced-Reference Quality Assessment of Point Clouds via Content-Oriented Saliency Projection
Jan 18, 2023Many dense 3D point clouds have been exploited to represent visual objects instead of traditional images or videos. To evaluate the perceptual quality of various point clouds, in this letter, we propose a novel and efficient Reduced-Reference quality metric for point clouds, which is based on Content-oriented sAliency Projection (RR-CAP). Specifically, we make the first attempt to simplify reference and distorted point clouds into projected saliency maps with a downsampling operation. Through this process, we tackle the issue of transmitting large-volume original point clouds to user-ends for quality assessment. Then, motivated by the characteristics of the human visual system (HVS), the objective quality scores of distorted point clouds are produced by combining content-oriented similarity and statistical correlation measurements. Finally, extensive experiments are conducted on SJTU-PCQA and WPC databases. The experimental results demonstrate that our proposed algorithm outperforms existing reduced-reference and no-reference quality metrics, and significantly reduces the performance gap between state-of-the-art full-reference quality assessment methods. In addition, we show the performance variation of each proposed technical component by ablation tests.
Dehazed Image Quality Evaluation: From Partial Discrepancy to Blind Perception
Nov 22, 2022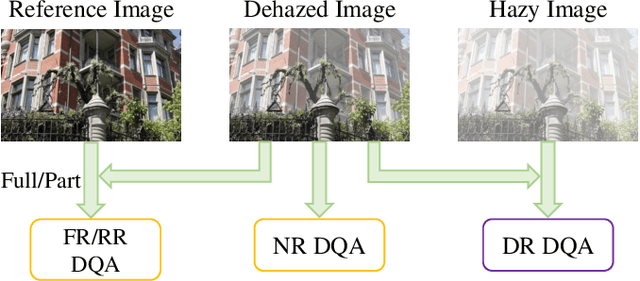
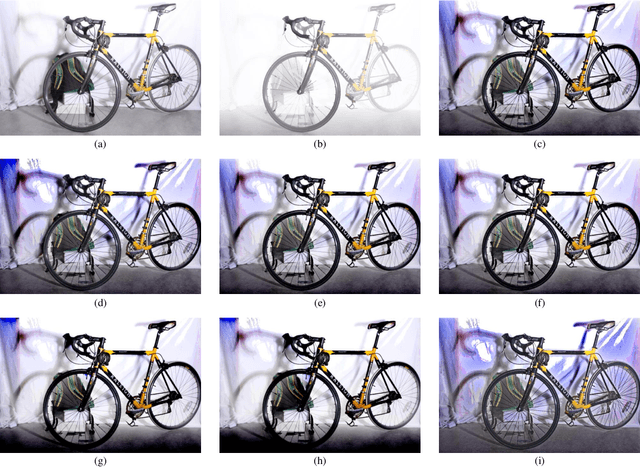

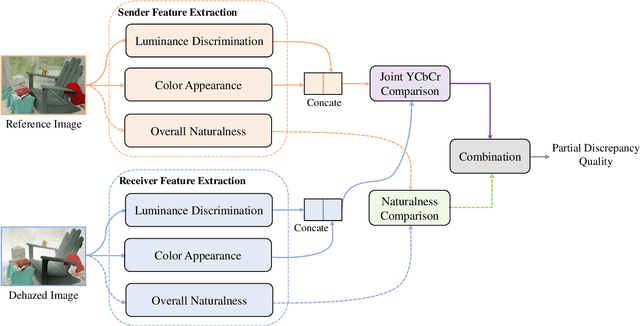
Image dehazing aims to restore spatial details from hazy images. There have emerged a number of image dehazing algorithms, designed to increase the visibility of those hazy images. However, much less work has been focused on evaluating the visual quality of dehazed images. In this paper, we propose a Reduced-Reference dehazed image quality evaluation approach based on Partial Discrepancy (RRPD) and then extend it to a No-Reference quality assessment metric with Blind Perception (NRBP). Specifically, inspired by the hierarchical characteristics of the human perceiving dehazed images, we introduce three groups of features: luminance discrimination, color appearance, and overall naturalness. In the proposed RRPD, the combined distance between a set of sender and receiver features is adopted to quantify the perceptually dehazed image quality. By integrating global and local channels from dehazed images, the RRPD is converted to NRBP which does not rely on any information from the references. Extensive experiment results on several dehazed image quality databases demonstrate that our proposed methods outperform state-of-the-art full-reference, reduced-reference, and no-reference quality assessment models. Furthermore, we show that the proposed dehazed image quality evaluation methods can be effectively applied to tune parameters for potential image dehazing algorithms.
Learning to Segment and Represent Motion Primitives from Driving Data for Motion Planning Applications
Sep 17, 2018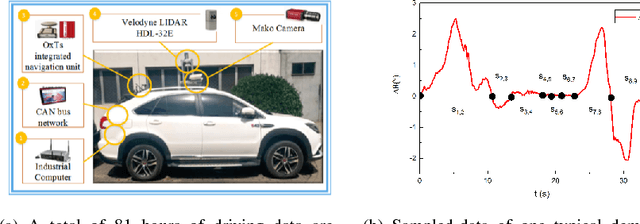
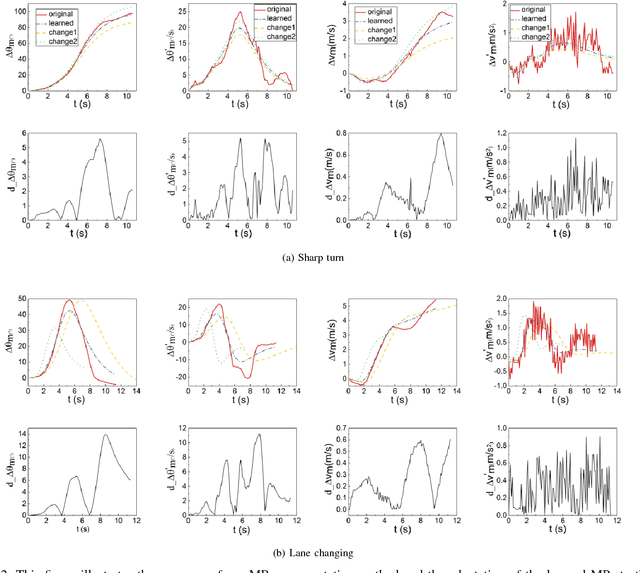


Developing an intelligent vehicle which can perform human-like actions requires the ability to learn basic driving skills from a large amount of naturalistic driving data. The algorithms will become efficient if we could decompose the complex driving tasks into motion primitives which represent the elementary compositions of driving skills. Therefore, the purpose of this paper is to segment unlabeled trajectory data into a library of motion primitives. By applying a probabilistic inference based on an iterative Expectation-Maximization algorithm, our method segments the collected trajectories while learning a set of motion primitives represented by the dynamic movement primitives. The proposed method utilizes the mutual dependencies between the segmentation and representation of motion primitives and the driving-specific based initial segmentation. By utilizing this mutual dependency and the initial condition, this paper presents how we can enhance the performance of both the segmentation and the motion primitive library establishment. We also evaluate the applicability of the primitive representation method to imitation learning and motion planning algorithms. The model is trained and validated by using the driving data collected from the Beijing Institute of Technology intelligent vehicle platform. The results show that the proposed approach can find the proper segmentation and establish the motion primitive library simultaneously.