 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegeneration and Joining of the Learned Motion Primitives for Automated Vehicle Motion Planning Applications
Jul 04, 2019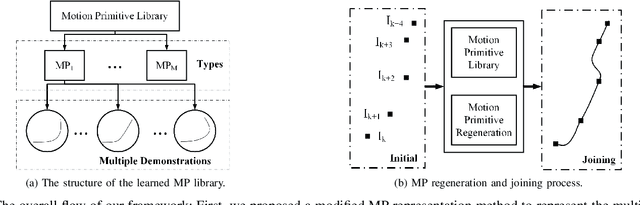
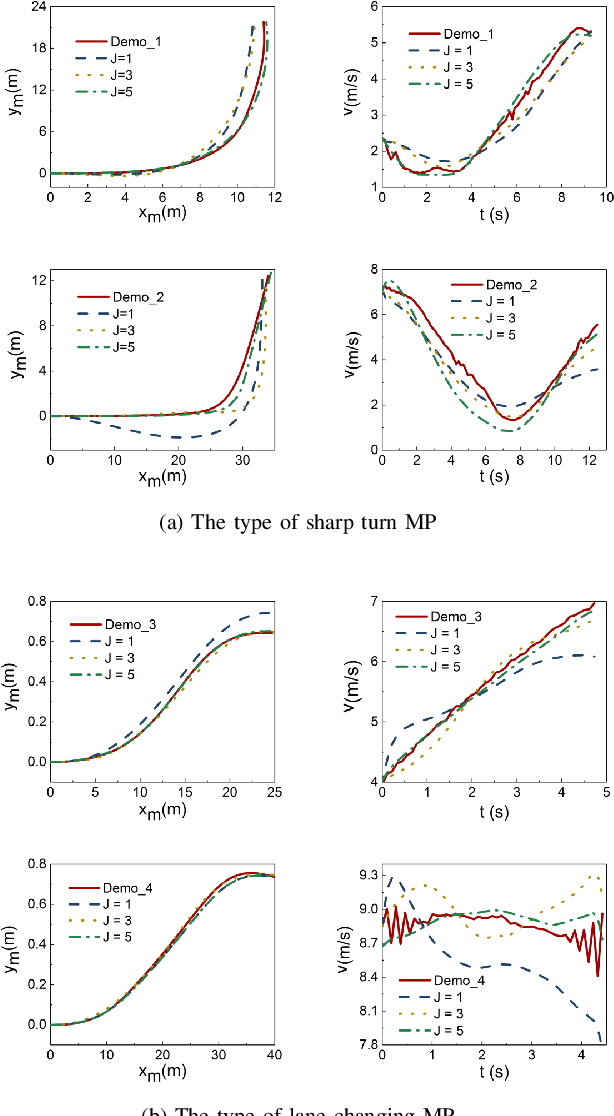
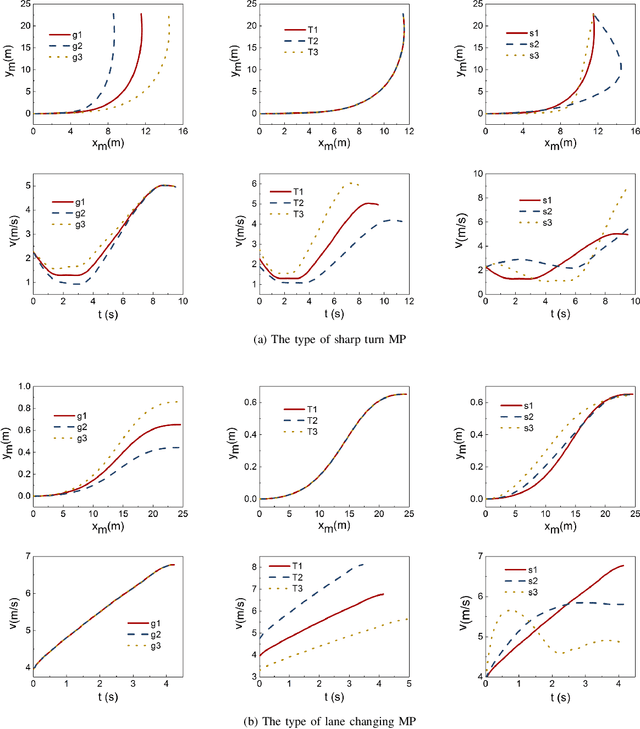

How to integrate human factors into the motion planning system is of great significance for improving the acceptance of intelligent vehicles. Decomposing motion into primitives and then accurately and smoothly joining the motion primitives (MPs) is an essential issue in the motion planning system. Therefore, the purpose of this paper is to regenerate and join the learned MPs in the library. By applying a representation algorithm based on the modified dynamic movement primitives (DMPs) and singular value decomposition (SVD), our method separates the basic shape parameters and fine-tuning shape parameters from the same type of demonstration trajectories in the MP library. Moreover, we convert the MP joining problem into a re-representation problem and use the characteristics of the proposed representation algorithm to achieve an accurate and smooth transition. This paper demonstrates that the proposed method can effectively reduce the number of shape adjustment parameters when the MPs are regenerated without affecting the accuracy of the representation. Besides, we also present the ability of the proposed method to smooth the velocity jump when the MPs are connected and evaluate its effect on the accuracy of tracking the set target points. The results show that the proposed method can not only improve the adjustment ability of a single MP in response to different motion planning requirements but also meet the basic requirements of MP joining in the generation of MP sequences.