 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLM4VLA: Revisiting Vision-Language-Models in Vision-Language-Action Models
Jan 06, 2026Vision-Language-Action (VLA) models, which integrate pretrained large Vision-Language Models (VLM) into their policy backbone, are gaining significant attention for their promising generalization capabilities. This paper revisits a fundamental yet seldom systematically studied question: how VLM choice and competence translate to downstream VLA policies performance? We introduce VLM4VLA, a minimal adaptation pipeline that converts general-purpose VLMs into VLA policies using only a small set of new learnable parameters for fair and efficient comparison. Despite its simplicity, VLM4VLA proves surprisingly competitive with more sophisticated network designs. Through extensive empirical studies on various downstream tasks across three benchmarks, we find that while VLM initialization offers a consistent benefit over training from scratch, a VLM's general capabilities are poor predictors of its downstream task performance. This challenges common assumptions, indicating that standard VLM competence is necessary but insufficient for effective embodied control. We further investigate the impact of specific embodied capabilities by fine-tuning VLMs on seven auxiliary embodied tasks (e.g., embodied QA, visual pointing, depth estimation). Contrary to intuition, improving a VLM's performance on specific embodied skills does not guarantee better downstream control performance. Finally, modality-level ablations identify the visual module in VLM, rather than the language component, as the primary performance bottleneck. We demonstrate that injecting control-relevant supervision into the vision encoder of the VLM yields consistent gains, even when the encoder remains frozen during downstream fine-tuning. This isolates a persistent domain gap between current VLM pretraining objectives and the requirements of embodied action-planning.
villa-X: Enhancing Latent Action Modeling in Vision-Language-Action Models
Jul 31, 2025Visual-Language-Action (VLA) models have emerged as a popular paradigm for learning robot manipulation policies that can follow language instructions and generalize to novel scenarios. Recent work has begun to explore the incorporation of latent actions, an abstract representation of visual change between two frames, into VLA pre-training. In this paper, we introduce villa-X, a novel Visual-Language-Latent-Action (ViLLA) framework that advances latent action modeling for learning generalizable robot manipulation policies. Our approach improves both how latent actions are learned and how they are incorporated into VLA pre-training. Together, these contributions enable villa-X to achieve superior performance across simulated environments including SIMPLER and LIBERO, as well as on two real-world robot setups including gripper and dexterous hand manipulation. We believe the ViLLA paradigm holds significant promise, and that our villa-X provides a strong foundation for future research.
UP-VLA: A Unified Understanding and Prediction Model for Embodied Agent
Jan 31, 2025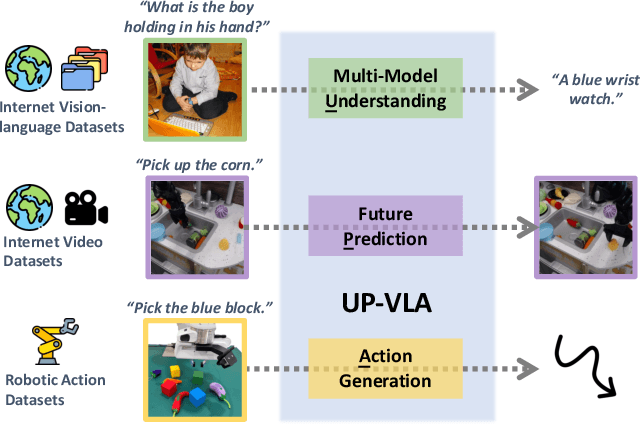
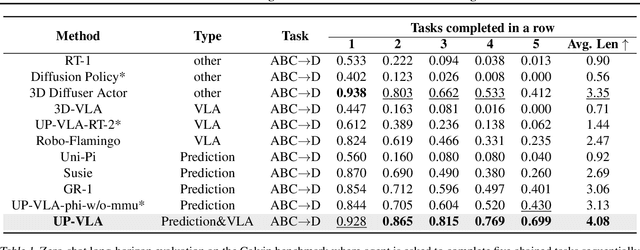
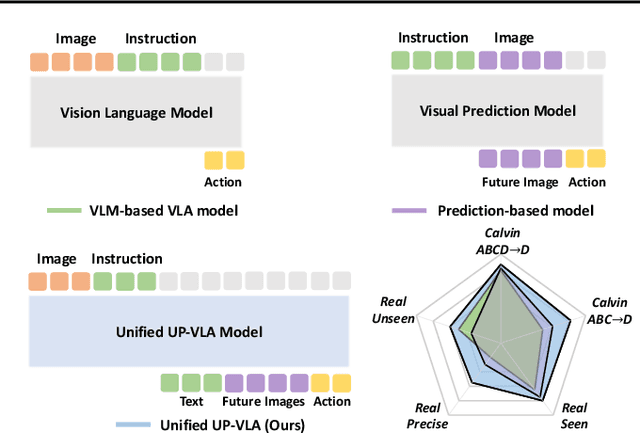
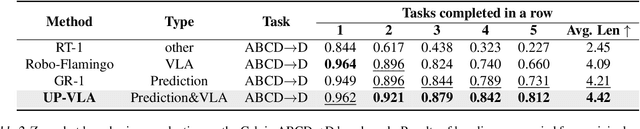
Recent advancements in Vision-Language-Action (VLA) models have leveraged pre-trained Vision-Language Models (VLMs) to improve the generalization capabilities. VLMs, typically pre-trained on vision-language understanding tasks, provide rich semantic knowledge and reasoning abilities. However, prior research has shown that VLMs often focus on high-level semantic content and neglect low-level features, limiting their ability to capture detailed spatial information and understand physical dynamics. These aspects, which are crucial for embodied control tasks, remain underexplored in existing pre-training paradigms. In this paper, we investigate the training paradigm for VLAs, and introduce \textbf{UP-VLA}, a \textbf{U}nified VLA model training with both multi-modal \textbf{U}nderstanding and future \textbf{P}rediction objectives, enhancing both high-level semantic comprehension and low-level spatial understanding. Experimental results show that UP-VLA achieves a 33% improvement on the Calvin ABC-D benchmark compared to the previous state-of-the-art method. Additionally, UP-VLA demonstrates improved success rates in real-world manipulation tasks, particularly those requiring precise spatial information.
Improving Vision-Language-Action Model with Online Reinforcement Learning
Jan 28, 2025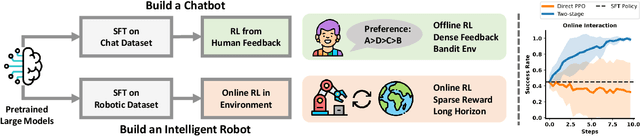
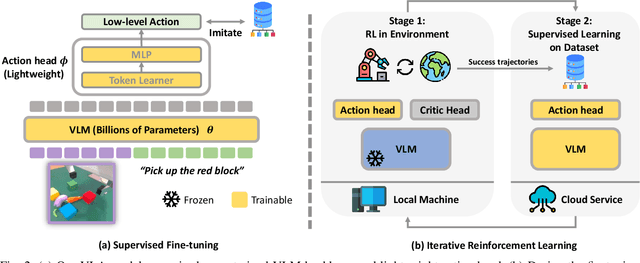
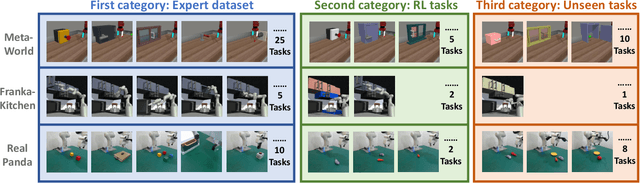
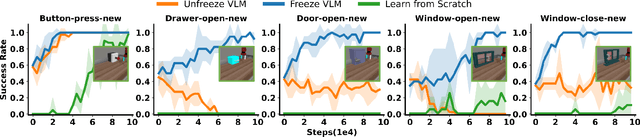
Recent studies have successfully integrated large vision-language models (VLMs) into low-level robotic control by supervised fine-tuning (SFT) with expert robotic datasets, resulting in what we term vision-language-action (VLA) models. Although the VLA models are powerful, how to improve these large models during interaction with environments remains an open question. In this paper, we explore how to further improve these VLA models via Reinforcement Learning (RL), a commonly used fine-tuning technique for large models. However, we find that directly applying online RL to large VLA models presents significant challenges, including training instability that severely impacts the performance of large models, and computing burdens that exceed the capabilities of most local machines. To address these challenges, we propose iRe-VLA framework, which iterates between Reinforcement Learning and Supervised Learning to effectively improve VLA models, leveraging the exploratory benefits of RL while maintaining the stability of supervised learning. Experiments in two simulated benchmarks and a real-world manipulation suite validate the effectiveness of our method.
Video Prediction Policy: A Generalist Robot Policy with Predictive Visual Representations
Dec 19, 2024



Recent advancements in robotics have focused on developing generalist policies capable of performing multiple tasks. Typically, these policies utilize pre-trained vision encoders to capture crucial information from current observations. However, previous vision encoders, which trained on two-image contrastive learning or single-image reconstruction, can not perfectly capture the sequential information essential for embodied tasks. Recently, video diffusion models (VDMs) have demonstrated the capability to accurately predict future image sequences, exhibiting a good understanding of physical dynamics. Motivated by the strong visual prediction capabilities of VDMs, we hypothesize that they inherently possess visual representations that reflect the evolution of the physical world, which we term predictive visual representations. Building on this hypothesis, we propose the Video Prediction Policy (VPP), a generalist robotic policy conditioned on the predictive visual representations from VDMs. To further enhance these representations, we incorporate diverse human or robotic manipulation datasets, employing unified video-generation training objectives. VPP consistently outperforms existing methods across two simulated and two real-world benchmarks. Notably, it achieves a 28.1\% relative improvement in the Calvin ABC-D benchmark compared to the previous state-of-the-art and delivers a 28.8\% increase in success rates for complex real-world dexterous manipulation tasks.
Prediction with Action: Visual Policy Learning via Joint Denoising Process
Nov 27, 2024



Diffusion models have demonstrated remarkable capabilities in image generation tasks, including image editing and video creation, representing a good understanding of the physical world. On the other line, diffusion models have also shown promise in robotic control tasks by denoising actions, known as diffusion policy. Although the diffusion generative model and diffusion policy exhibit distinct capabilities--image prediction and robotic action, respectively--they technically follow a similar denoising process. In robotic tasks, the ability to predict future images and generate actions is highly correlated since they share the same underlying dynamics of the physical world. Building on this insight, we introduce PAD, a novel visual policy learning framework that unifies image Prediction and robot Action within a joint Denoising process. Specifically, PAD utilizes Diffusion Transformers (DiT) to seamlessly integrate images and robot states, enabling the simultaneous prediction of future images and robot actions. Additionally, PAD supports co-training on both robotic demonstrations and large-scale video datasets and can be easily extended to other robotic modalities, such as depth images. PAD outperforms previous methods, achieving a significant 26.3% relative improvement on the full Metaworld benchmark, by utilizing a single text-conditioned visual policy within a data-efficient imitation learning setting. Furthermore, PAD demonstrates superior generalization to unseen tasks in real-world robot manipulation settings with 28.0% success rate increase compared to the strongest baseline. Project page at https://sites.google.com/view/pad-paper
Advancing Humanoid Locomotion: Mastering Challenging Terrains with Denoising World Model Learning
Aug 26, 2024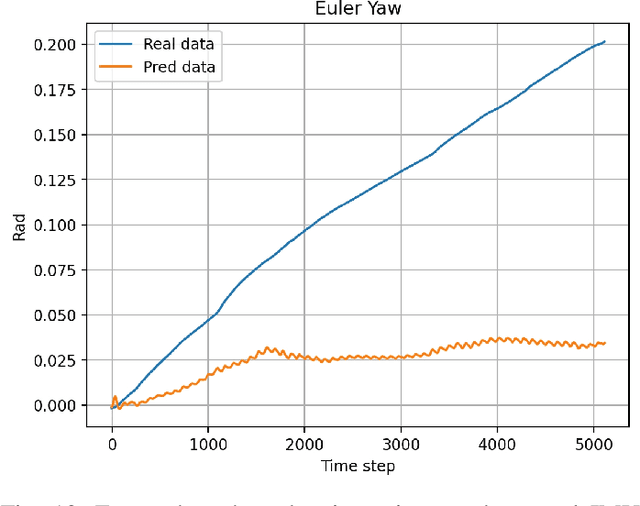
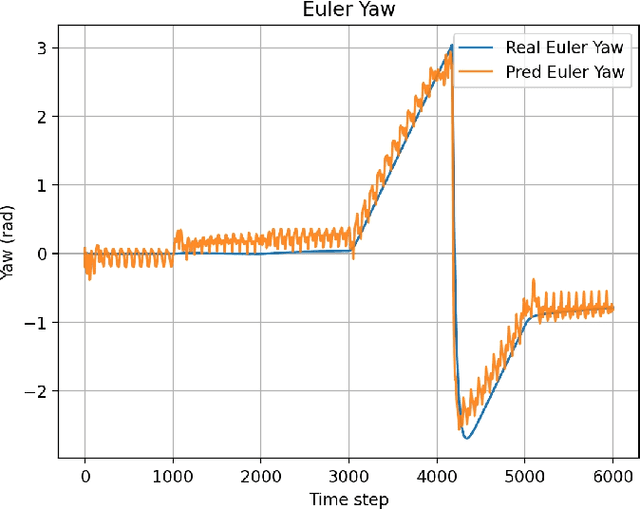
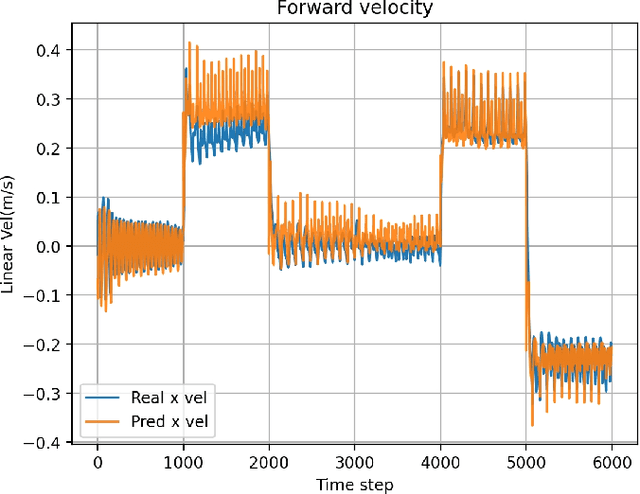
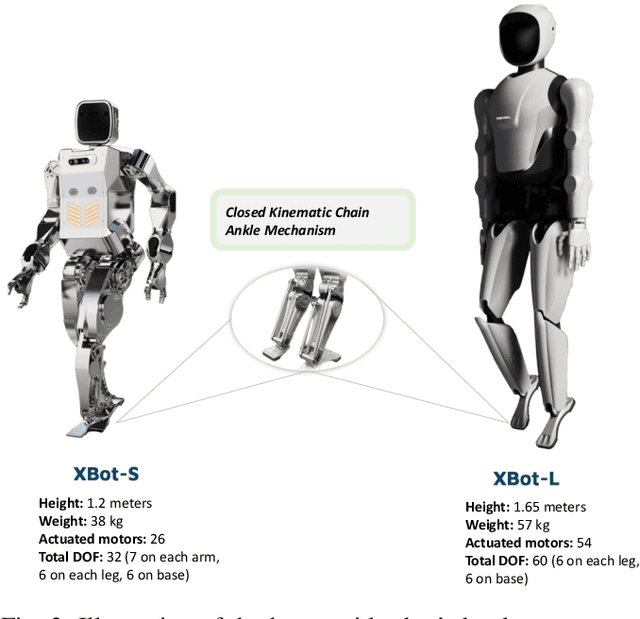
Humanoid robots, with their human-like skeletal structure, are especially suited for tasks in human-centric environments. However, this structure is accompanied by additional challenges in locomotion controller design, especially in complex real-world environments. As a result, existing humanoid robots are limited to relatively simple terrains, either with model-based control or model-free reinforcement learning. In this work, we introduce Denoising World Model Learning (DWL), an end-to-end reinforcement learning framework for humanoid locomotion control, which demonstrates the world's first humanoid robot to master real-world challenging terrains such as snowy and inclined land in the wild, up and down stairs, and extremely uneven terrains. All scenarios run the same learned neural network with zero-shot sim-to-real transfer, indicating the superior robustness and generalization capability of the proposed method.
DoReMi: Grounding Language Model by Detecting and Recovering from Plan-Execution Misalignment
Jul 01, 2023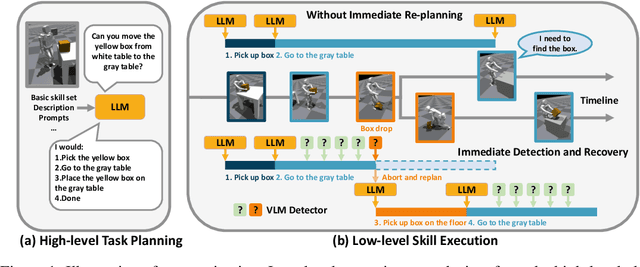

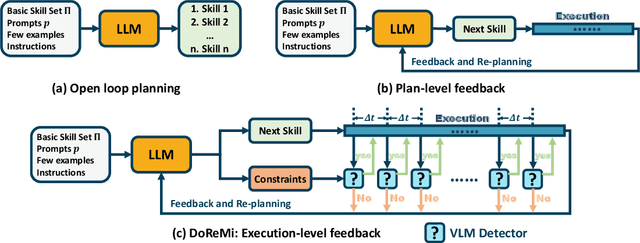
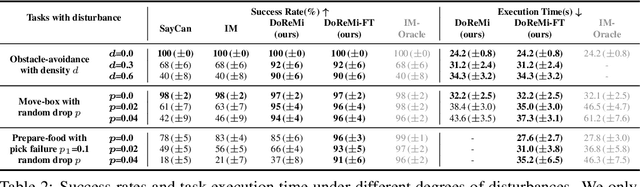
Large language models encode a vast amount of semantic knowledge and possess remarkable understanding and reasoning capabilities. Previous research has explored how to ground language models in robotic tasks to ensure that the sequences generated by the language model are both logically correct and practically executable. However, low-level execution may deviate from the high-level plan due to environmental perturbations or imperfect controller design. In this paper, we propose DoReMi, a novel language model grounding framework that enables immediate Detection and Recovery from Misalignments between plan and execution. Specifically, during low-level skill execution, we use a vision question answering (VQA) model to regularly detect plan-execution misalignments. If certain misalignment occurs, our method will call the language model to re-plan in order to recover from misalignments. Experiments on various complex tasks including robot arms and humanoid robots demonstrate that our method can lead to higher task success rates and shorter task completion times. Videos of DoReMi are available at https://sites.google.com/view/doremi-paper.
Decentralized Motor Skill Learning for Complex Robotic Systems
Jun 30, 2023Reinforcement learning (RL) has achieved remarkable success in complex robotic systems (eg. quadruped locomotion). In previous works, the RL-based controller was typically implemented as a single neural network with concatenated observation input. However, the corresponding learned policy is highly task-specific. Since all motors are controlled in a centralized way, out-of-distribution local observations can impact global motors through the single coupled neural network policy. In contrast, animals and humans can control their limbs separately. Inspired by this biological phenomenon, we propose a Decentralized motor skill (DEMOS) learning algorithm to automatically discover motor groups that can be decoupled from each other while preserving essential connections and then learn a decentralized motor control policy. Our method improves the robustness and generalization of the policy without sacrificing performance. Experiments on quadruped and humanoid robots demonstrate that the learned policy is robust against local motor malfunctions and can be transferred to new tasks.
Reinforcement learning with Demonstrations from Mismatched Task under Sparse Reward
Dec 03, 2022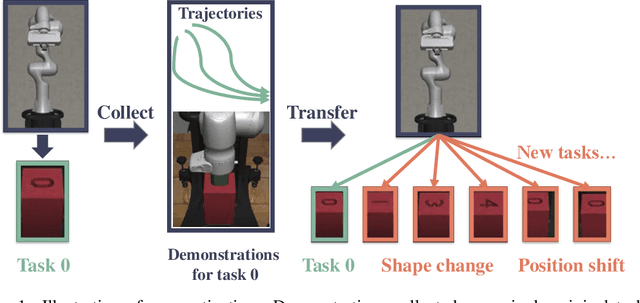
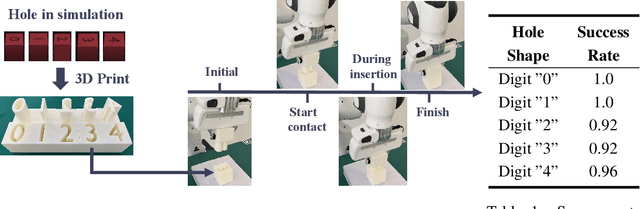
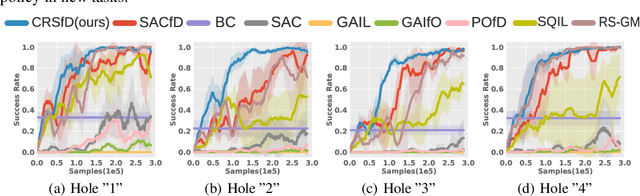
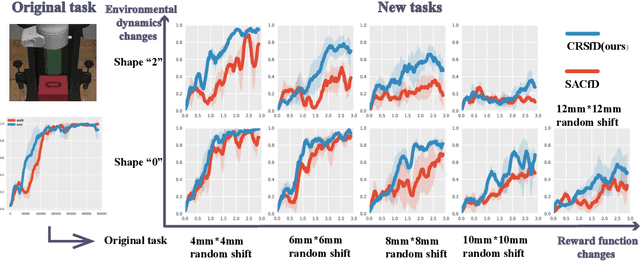
Reinforcement learning often suffer from the sparse reward issue in real-world robotics problems. Learning from demonstration (LfD) is an effective way to eliminate this problem, which leverages collected expert data to aid online learning. Prior works often assume that the learning agent and the expert aim to accomplish the same task, which requires collecting new data for every new task. In this paper, we consider the case where the target task is mismatched from but similar with that of the expert. Such setting can be challenging and we found existing LfD methods can not effectively guide learning in mismatched new tasks with sparse rewards. We propose conservative reward shaping from demonstration (CRSfD), which shapes the sparse rewards using estimated expert value function. To accelerate learning processes, CRSfD guides the agent to conservatively explore around demonstrations. Experimental results of robot manipulation tasks show that our approach outperforms baseline LfD methods when transferring demonstrations collected in a single task to other different but similar tasks.