 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVeo-Act: How Far Can Frontier Video Models Advance Generalizable Robot Manipulation?
Apr 06, 2026Video generation models have advanced rapidly and are beginning to show a strong understanding of physical dynamics. In this paper, we investigate how far an advanced video generation model such as Veo-3 can support generalizable robotic manipulation. We first study a zero-shot approach in which Veo-3 predicts future image sequences from current robot observations, while an inverse dynamics model IDM recovers the corresponding robot actions. The IDM is trained solely on random-play data, requiring neither human supervision nor expert demonstrations. The key intuition is that, if a video model can generate physically plausible future motions in image space, an IDM can translate those visual trajectories into executable robot actions. We evaluate this "Veo-3+IDM" approach in both simulation and the real world using a high-dimensional dexterous hand. We find that, owing to the strong generalization capability of frontier video models, Veo-3+IDM can consistently generate approximately correct task-level trajectories. However, its low-level control accuracy remains insufficient to solve most tasks reliably. Motivated by this observation, we develop a hierarchical framework, Veo-Act, which uses Veo-3 as a high-level motion planner and a VLA policy as the low-level executor, significantly improving the instruction-following performance of a state-of-the-art vision-language-action policy. Overall, our results suggest that, as video generation models continue to improve, video models can be a valuable component for generalizable robot learning.
RealChart2Code: Advancing Chart-to-Code Generation with Real Data and Multi-Task Evaluation
Mar 26, 2026Vision-Language Models (VLMs) have demonstrated impressive capabilities in code generation across various domains. However, their ability to replicate complex, multi-panel visualizations from real-world data remains largely unassessed. To address this gap, we introduce \textbf{\texttt{RealChart2Code}}, a new large-scale benchmark with over 2,800 instances grounded in authentic datasets and featuring tasks with clear analytical intent. Crucially, it is the first benchmark to systematically evaluate chart generation from large-scale raw data and assess iterative code refinement in a multi-turn conversational setting. Our comprehensive evaluation of 14 leading VLMs on \texttt{RealChart2Code} reveals significant performance degradation compared to simpler benchmarks, highlighting their struggles with complex plot structures and authentic data. Our analysis uncovers a substantial performance gap between proprietary and open-weight models and confirms that even state-of-the-art VLMs often fail to accurately replicate intricate, multi-panel charts. These findings provide valuable insights into the current limitations of VLMs and guide future research directions. We release the benchmark and code at \url{https://github.com/Speakn0w/RealChart2Code}.
BagelVLA: Enhancing Long-Horizon Manipulation via Interleaved Vision-Language-Action Generation
Feb 11, 2026Equipping embodied agents with the ability to reason about tasks, foresee physical outcomes, and generate precise actions is essential for general-purpose manipulation. While recent Vision-Language-Action (VLA) models have leveraged pre-trained foundation models, they typically focus on either linguistic planning or visual forecasting in isolation. These methods rarely integrate both capabilities simultaneously to guide action generation, leading to suboptimal performance in complex, long-horizon manipulation tasks. To bridge this gap, we propose BagelVLA, a unified model that integrates linguistic planning, visual forecasting, and action generation within a single framework. Initialized from a pretrained unified understanding and generative model, BagelVLA is trained to interleave textual reasoning and visual prediction directly into the action execution loop. To efficiently couple these modalities, we introduce Residual Flow Guidance (RFG), which initializes from current observation and leverages single-step denoising to extract predictive visual features, guiding action generation with minimal latency. Extensive experiments demonstrate that BagelVLA outperforms existing baselines by a significant margin on multiple simulated and real-world benchmarks, particularly in tasks requiring multi-stage reasoning.
VLM4VLA: Revisiting Vision-Language-Models in Vision-Language-Action Models
Jan 06, 2026Vision-Language-Action (VLA) models, which integrate pretrained large Vision-Language Models (VLM) into their policy backbone, are gaining significant attention for their promising generalization capabilities. This paper revisits a fundamental yet seldom systematically studied question: how VLM choice and competence translate to downstream VLA policies performance? We introduce VLM4VLA, a minimal adaptation pipeline that converts general-purpose VLMs into VLA policies using only a small set of new learnable parameters for fair and efficient comparison. Despite its simplicity, VLM4VLA proves surprisingly competitive with more sophisticated network designs. Through extensive empirical studies on various downstream tasks across three benchmarks, we find that while VLM initialization offers a consistent benefit over training from scratch, a VLM's general capabilities are poor predictors of its downstream task performance. This challenges common assumptions, indicating that standard VLM competence is necessary but insufficient for effective embodied control. We further investigate the impact of specific embodied capabilities by fine-tuning VLMs on seven auxiliary embodied tasks (e.g., embodied QA, visual pointing, depth estimation). Contrary to intuition, improving a VLM's performance on specific embodied skills does not guarantee better downstream control performance. Finally, modality-level ablations identify the visual module in VLM, rather than the language component, as the primary performance bottleneck. We demonstrate that injecting control-relevant supervision into the vision encoder of the VLM yields consistent gains, even when the encoder remains frozen during downstream fine-tuning. This isolates a persistent domain gap between current VLM pretraining objectives and the requirements of embodied action-planning.
UP-VLA: A Unified Understanding and Prediction Model for Embodied Agent
Jan 31, 2025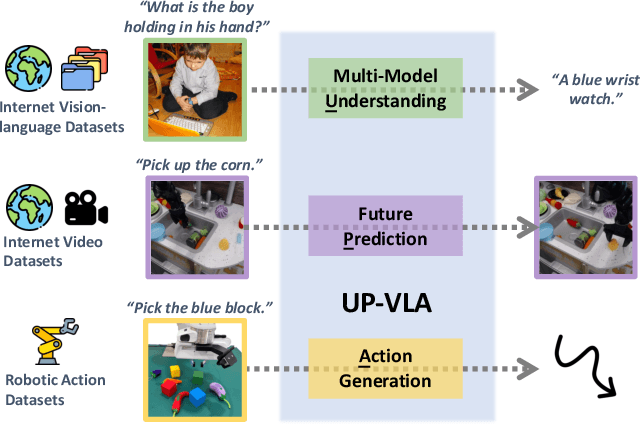
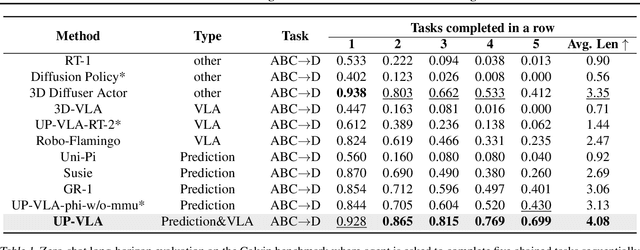
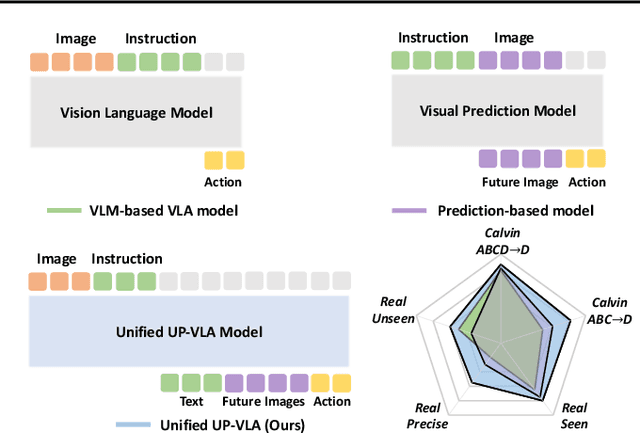
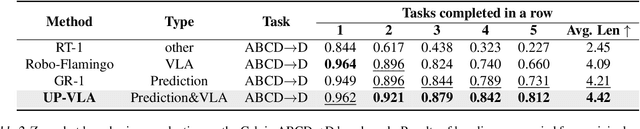
Recent advancements in Vision-Language-Action (VLA) models have leveraged pre-trained Vision-Language Models (VLMs) to improve the generalization capabilities. VLMs, typically pre-trained on vision-language understanding tasks, provide rich semantic knowledge and reasoning abilities. However, prior research has shown that VLMs often focus on high-level semantic content and neglect low-level features, limiting their ability to capture detailed spatial information and understand physical dynamics. These aspects, which are crucial for embodied control tasks, remain underexplored in existing pre-training paradigms. In this paper, we investigate the training paradigm for VLAs, and introduce \textbf{UP-VLA}, a \textbf{U}nified VLA model training with both multi-modal \textbf{U}nderstanding and future \textbf{P}rediction objectives, enhancing both high-level semantic comprehension and low-level spatial understanding. Experimental results show that UP-VLA achieves a 33% improvement on the Calvin ABC-D benchmark compared to the previous state-of-the-art method. Additionally, UP-VLA demonstrates improved success rates in real-world manipulation tasks, particularly those requiring precise spatial information.
Improving Vision-Language-Action Model with Online Reinforcement Learning
Jan 28, 2025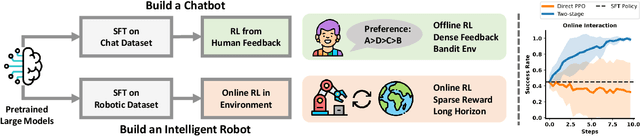
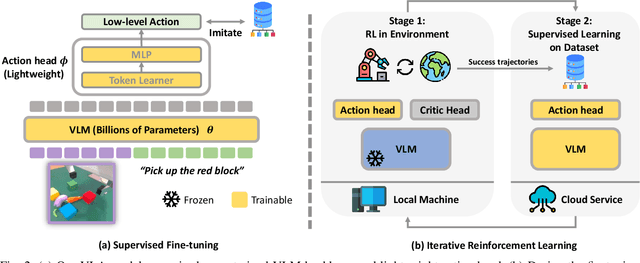
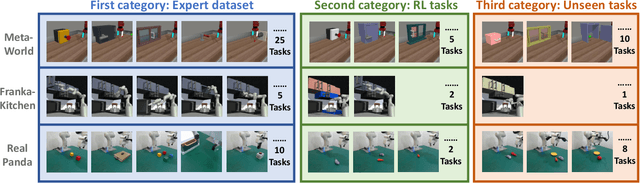
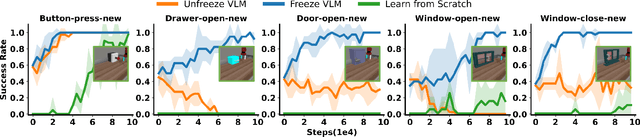
Recent studies have successfully integrated large vision-language models (VLMs) into low-level robotic control by supervised fine-tuning (SFT) with expert robotic datasets, resulting in what we term vision-language-action (VLA) models. Although the VLA models are powerful, how to improve these large models during interaction with environments remains an open question. In this paper, we explore how to further improve these VLA models via Reinforcement Learning (RL), a commonly used fine-tuning technique for large models. However, we find that directly applying online RL to large VLA models presents significant challenges, including training instability that severely impacts the performance of large models, and computing burdens that exceed the capabilities of most local machines. To address these challenges, we propose iRe-VLA framework, which iterates between Reinforcement Learning and Supervised Learning to effectively improve VLA models, leveraging the exploratory benefits of RL while maintaining the stability of supervised learning. Experiments in two simulated benchmarks and a real-world manipulation suite validate the effectiveness of our method.
Video Prediction Policy: A Generalist Robot Policy with Predictive Visual Representations
Dec 19, 2024



Recent advancements in robotics have focused on developing generalist policies capable of performing multiple tasks. Typically, these policies utilize pre-trained vision encoders to capture crucial information from current observations. However, previous vision encoders, which trained on two-image contrastive learning or single-image reconstruction, can not perfectly capture the sequential information essential for embodied tasks. Recently, video diffusion models (VDMs) have demonstrated the capability to accurately predict future image sequences, exhibiting a good understanding of physical dynamics. Motivated by the strong visual prediction capabilities of VDMs, we hypothesize that they inherently possess visual representations that reflect the evolution of the physical world, which we term predictive visual representations. Building on this hypothesis, we propose the Video Prediction Policy (VPP), a generalist robotic policy conditioned on the predictive visual representations from VDMs. To further enhance these representations, we incorporate diverse human or robotic manipulation datasets, employing unified video-generation training objectives. VPP consistently outperforms existing methods across two simulated and two real-world benchmarks. Notably, it achieves a 28.1\% relative improvement in the Calvin ABC-D benchmark compared to the previous state-of-the-art and delivers a 28.8\% increase in success rates for complex real-world dexterous manipulation tasks.
Prediction with Action: Visual Policy Learning via Joint Denoising Process
Nov 27, 2024



Diffusion models have demonstrated remarkable capabilities in image generation tasks, including image editing and video creation, representing a good understanding of the physical world. On the other line, diffusion models have also shown promise in robotic control tasks by denoising actions, known as diffusion policy. Although the diffusion generative model and diffusion policy exhibit distinct capabilities--image prediction and robotic action, respectively--they technically follow a similar denoising process. In robotic tasks, the ability to predict future images and generate actions is highly correlated since they share the same underlying dynamics of the physical world. Building on this insight, we introduce PAD, a novel visual policy learning framework that unifies image Prediction and robot Action within a joint Denoising process. Specifically, PAD utilizes Diffusion Transformers (DiT) to seamlessly integrate images and robot states, enabling the simultaneous prediction of future images and robot actions. Additionally, PAD supports co-training on both robotic demonstrations and large-scale video datasets and can be easily extended to other robotic modalities, such as depth images. PAD outperforms previous methods, achieving a significant 26.3% relative improvement on the full Metaworld benchmark, by utilizing a single text-conditioned visual policy within a data-efficient imitation learning setting. Furthermore, PAD demonstrates superior generalization to unseen tasks in real-world robot manipulation settings with 28.0% success rate increase compared to the strongest baseline. Project page at https://sites.google.com/view/pad-paper
Cross-Modal Adapter for Text-Video Retrieval
Nov 17, 2022Text-video retrieval is an important multi-modal learning task, where the goal is to retrieve the most relevant video for a given text query. Recently, pre-trained models, e.g., CLIP, show great potential on this task. However, as pre-trained models are scaling up, fully fine-tuning them on text-video retrieval datasets has a high risk of overfitting. Moreover, in practice, it would be costly to train and store a large model for each task. To overcome the above issues, we present a novel $\textbf{Cross-Modal Adapter}$ for parameter-efficient fine-tuning. Inspired by adapter-based methods, we adjust the pre-trained model with a few parameterization layers. However, there are two notable differences. First, our method is designed for the multi-modal domain. Secondly, it allows early cross-modal interactions between CLIP's two encoders. Although surprisingly simple, our approach has three notable benefits: (1) reduces $\textbf{99.6}\%$ of fine-tuned parameters, and alleviates the problem of overfitting, (2) saves approximately 30% of training time, and (3) allows all the pre-trained parameters to be fixed, enabling the pre-trained model to be shared across datasets. Extensive experiments demonstrate that, without bells and whistles, it achieves superior or comparable performance compared to fully fine-tuned methods on MSR-VTT, MSVD, VATEX, ActivityNet, and DiDeMo datasets. The code will be available at \url{https://github.com/LeapLabTHU/Cross-Modal-Adapter}.