 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussians on a Diet: High-Quality Memory-Bounded 3D Gaussian Splatting Training
Apr 21, 20263D Gaussian Splatting (3DGS) has revolutionized novel view synthesis with high-quality rendering through continuous aggregations of millions of 3D Gaussian primitives. However, it suffers from a substantial memory footprint, particularly during training due to uncontrolled densification, posing a critical bottleneck for deployment on memory-constrained edge devices. While existing methods prune redundant Gaussians post-training, they fail to address the peak memory spikes caused by the abrupt growth of Gaussians early in the training process. To solve the training memory consumption problem, we propose a systematic memory-bounded training framework that dynamically optimizes Gaussians through iterative growth and pruning. In other words, the proposed framework alternates between incremental pruning of low-impact Gaussians and strategic growing of new primitives with an adaptive Gaussian compensation, maintaining a near-constant low memory usage while progressively refining rendering fidelity. We comprehensively evaluate the proposed training framework on various real-world datasets under strict memory constraints, showing significant improvements over existing state-of-the-art methods. Particularly, our proposed method practically enables memory-efficient 3DGS training on NVIDIA Jetson AGX Xavier, achieving similar visual quality with up to 80% lower peak training memory consumption than the original 3DGS.
A Flow Matching Framework for Soft-Robot Inverse Dynamics
Apr 03, 2026Learning the inverse dynamics of soft continuum robots remains challenging due to high-dimensional nonlinearities and complex actuation coupling. Conventional feedback-based controllers often suffer from control chattering due to corrective oscillations, while deterministic regression-based learners struggle to capture the complex nonlinear mappings required for accurate dynamic tracking. Motivated by these limitations, we propose an inverse-dynamics framework for open-loop feedforward control that learns the system's differential dynamics as a generative transport map. Specifically, inverse dynamics is reformulated as a conditional flow-matching problem, and Rectified Flow (RF) is adopted as a lightweight instance to generate physically consistent control inputs rather than conditional averages. Two variants are introduced to further enhance physical consistency: RF-Physical, utilizing a physics-based prior for residual modeling; and RF-FWD, integrating a forward-dynamics consistency loss during flow matching. Extensive evaluations demonstrate that our framework reduces trajectory tracking RMSE by over 50% compared to standard regression baselines (MLP, LSTM, Transformer). The system sustains stable open-loop execution at a peak end-effector velocity of 1.14 m/s with sub-millisecond inference latency (0.995 ms). This work demonstrates flow matching as a robust, high-performance paradigm for learning differential inverse dynamics in soft robotic systems.
Ultra-Low Complexity On-Orbit Compression for Remote Sensing Imagery via Block Modulated Imaging
Dec 24, 2024The growing field of remote sensing faces a challenge: the ever-increasing size and volume of imagery data are exceeding the storage and transmission capabilities of satellite platforms. Efficient compression of remote sensing imagery is a critical solution to alleviate these burdens on satellites. However, existing compression methods are often too computationally expensive for satellites. With the continued advancement of compressed sensing theory, single-pixel imaging emerges as a powerful tool that brings new possibilities for on-orbit image compression. However, it still suffers from prolonged imaging times and the inability to perform high-resolution imaging, hindering its practical application. This paper advances the study of compressed sensing in remote sensing image compression, proposing Block Modulated Imaging (BMI). By requiring only a single exposure, BMI significantly enhances imaging acquisition speeds. Additionally, BMI obviates the need for digital micromirror devices and surpasses limitations in image resolution. Furthermore, we propose a novel decoding network specifically designed to reconstruct images compressed under the BMI framework. Leveraging the gated 3D convolutions and promoting efficient information flow across stages through a Two-Way Cross-Attention module, our decoding network exhibits demonstrably superior reconstruction performance. Extensive experiments conducted on multiple renowned remote sensing datasets unequivocally demonstrate the efficacy of our proposed method. To further validate its practical applicability, we developed and tested a prototype of the BMI-based camera, which has shown promising potential for on-orbit image compression. The code is available at https://github.com/Johnathan218/BMNet.
GaussianSpa: An "Optimizing-Sparsifying" Simplification Framework for Compact and High-Quality 3D Gaussian Splatting
Nov 09, 2024



3D Gaussian Splatting (3DGS) has emerged as a mainstream for novel view synthesis, leveraging continuous aggregations of Gaussian functions to model scene geometry. However, 3DGS suffers from substantial memory requirements to store the multitude of Gaussians, hindering its practicality. To address this challenge, we introduce GaussianSpa, an optimization-based simplification framework for compact and high-quality 3DGS. Specifically, we formulate the simplification as an optimization problem associated with the 3DGS training. Correspondingly, we propose an efficient "optimizing-sparsifying" solution that alternately solves two independent sub-problems, gradually imposing strong sparsity onto the Gaussians in the training process. Our comprehensive evaluations on various datasets show the superiority of GaussianSpa over existing state-of-the-art approaches. Notably, GaussianSpa achieves an average PSNR improvement of 0.9 dB on the real-world Deep Blending dataset with 10$\times$ fewer Gaussians compared to the vanilla 3DGS. Our project page is available at https://gaussianspa.github.io/.
A Two-Stage Imaging Framework Combining CNN and Physics-Informed Neural Networks for Full-Inverse Tomography: A Case Study in Electrical Impedance Tomography (EIT)
Jul 25, 2024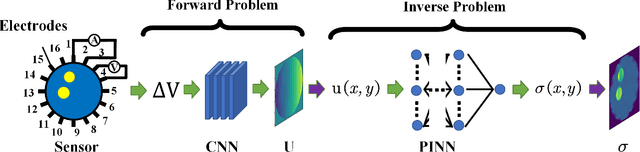
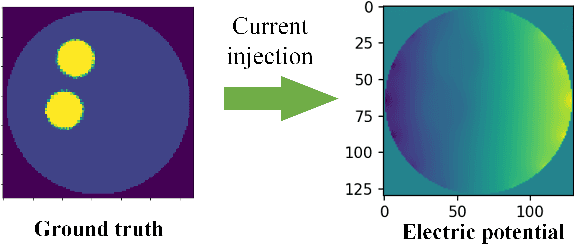
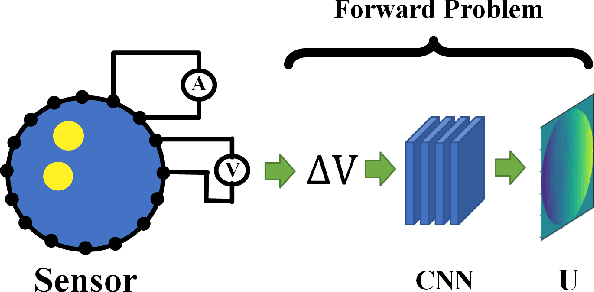
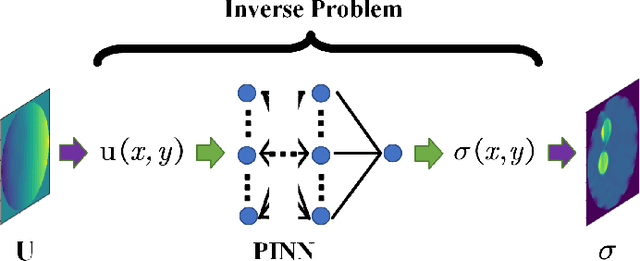
Physics-Informed Neural Networks (PINNs) are a machine learning technique for solving partial differential equations (PDEs) by incorporating PDEs as loss terms in neural networks and minimizing the loss function during training. Tomographic imaging, a method to reconstruct internal properties from external measurement data, is highly complex and ill-posed, making it an inverse problem. Recently, PINNs have shown significant potential in computational fluid dynamics (CFD) and have advantages in solving inverse problems. However, existing research has primarily focused on semi-inverse Electrical Impedance Tomography (EIT), where internal electric potentials are accessible. The practical full inverse EIT problem, where only boundary voltage measurements are available, remains challenging. To address this, we propose a two-stage hybrid learning framework combining Convolutional Neural Networks (CNNs) and PINNs to solve the full inverse EIT problem. This framework integrates data-driven and model-driven approaches, combines supervised and unsupervised learning, and decouples the forward and inverse problems within the PINN framework in EIT. Stage I: a U-Net constructs an end-to-end mapping from boundary voltage measurements to the internal potential distribution using supervised learning. Stage II: a Multilayer Perceptron (MLP)-based PINN takes the predicted internal potentials as input to solve for the conductivity distribution through unsupervised learning.
Diffusion Models as Optimizers for Efficient Planning in Offline RL
Jul 23, 2024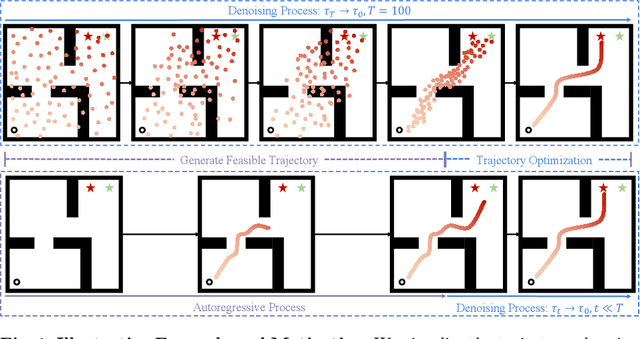
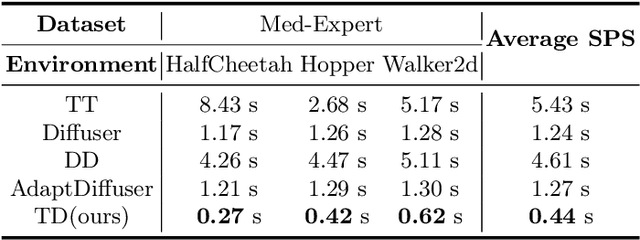
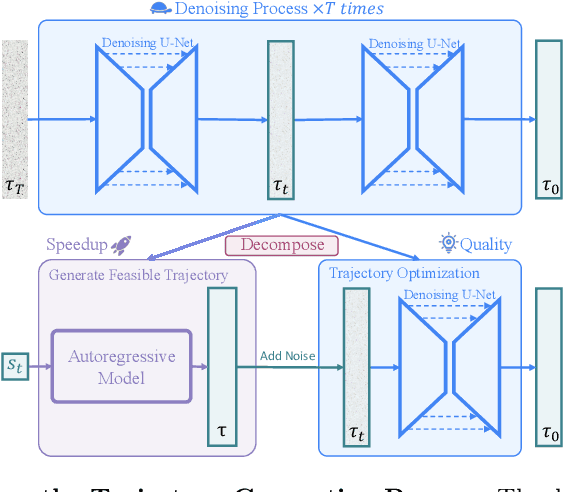
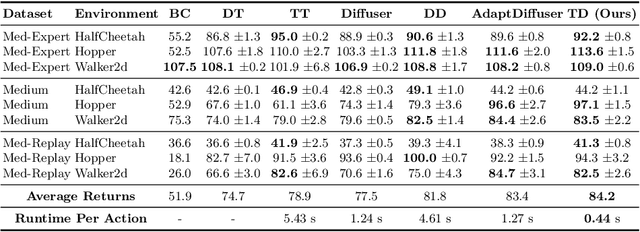
Diffusion models have shown strong competitiveness in offline reinforcement learning tasks by formulating decision-making as sequential generation. However, the practicality of these methods is limited due to the lengthy inference processes they require. In this paper, we address this problem by decomposing the sampling process of diffusion models into two decoupled subprocesses: 1) generating a feasible trajectory, which is a time-consuming process, and 2) optimizing the trajectory. With this decomposition approach, we are able to partially separate efficiency and quality factors, enabling us to simultaneously gain efficiency advantages and ensure quality assurance. We propose the Trajectory Diffuser, which utilizes a faster autoregressive model to handle the generation of feasible trajectories while retaining the trajectory optimization process of diffusion models. This allows us to achieve more efficient planning without sacrificing capability. To evaluate the effectiveness and efficiency of the Trajectory Diffuser, we conduct experiments on the D4RL benchmarks. The results demonstrate that our method achieves $\it 3$-$\it 10 \times$ faster inference speed compared to previous sequence modeling methods, while also outperforming them in terms of overall performance. https://github.com/RenMing-Huang/TrajectoryDiffuser Keywords: Reinforcement Learning and Efficient Planning and Diffusion Model
SoK: Comparing Different Membership Inference Attacks with a Comprehensive Benchmark
Jul 12, 2023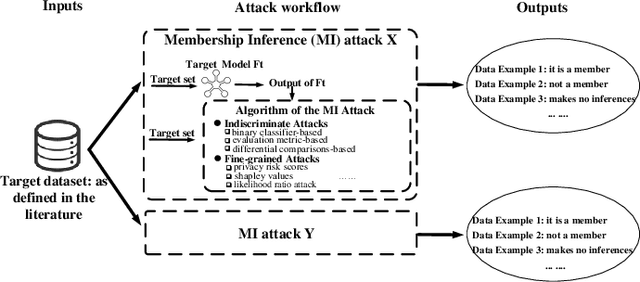
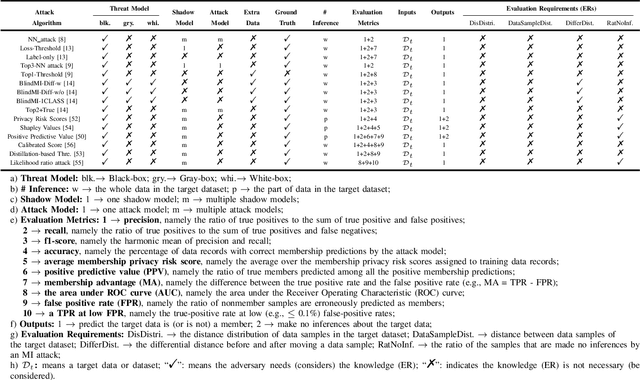

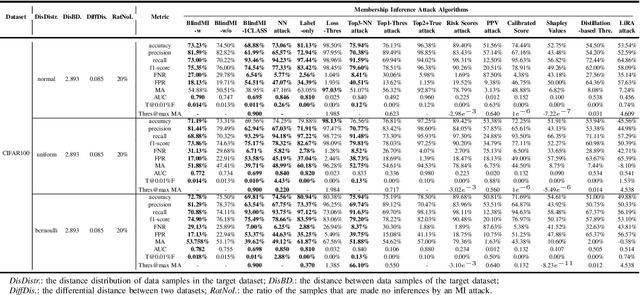
Membership inference (MI) attacks threaten user privacy through determining if a given data example has been used to train a target model. However, it has been increasingly recognized that the "comparing different MI attacks" methodology used in the existing works has serious limitations. Due to these limitations, we found (through the experiments in this work) that some comparison results reported in the literature are quite misleading. In this paper, we seek to develop a comprehensive benchmark for comparing different MI attacks, called MIBench, which consists not only the evaluation metrics, but also the evaluation scenarios. And we design the evaluation scenarios from four perspectives: the distance distribution of data samples in the target dataset, the distance between data samples of the target dataset, the differential distance between two datasets (i.e., the target dataset and a generated dataset with only nonmembers), and the ratio of the samples that are made no inferences by an MI attack. The evaluation metrics consist of ten typical evaluation metrics. We have identified three principles for the proposed "comparing different MI attacks" methodology, and we have designed and implemented the MIBench benchmark with 84 evaluation scenarios for each dataset. In total, we have used our benchmark to fairly and systematically compare 15 state-of-the-art MI attack algorithms across 588 evaluation scenarios, and these evaluation scenarios cover 7 widely used datasets and 7 representative types of models. All codes and evaluations of MIBench are publicly available at https://github.com/MIBench/MIBench.github.io/blob/main/README.md.