 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Two-Stage Imaging Framework Combining CNN and Physics-Informed Neural Networks for Full-Inverse Tomography: A Case Study in Electrical Impedance Tomography (EIT)
Jul 25, 2024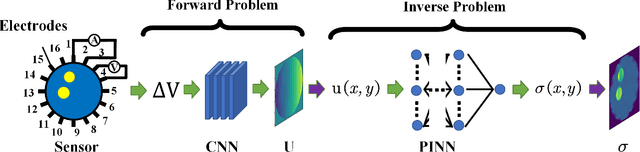
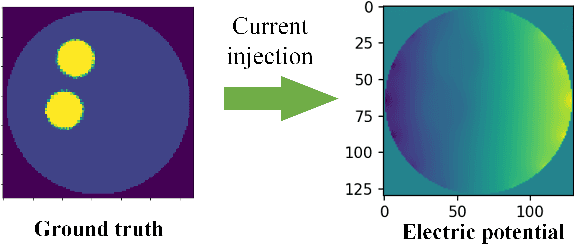
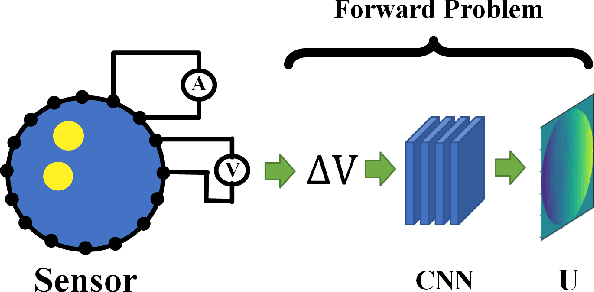
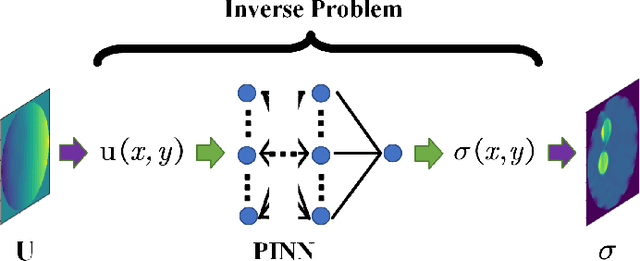
Physics-Informed Neural Networks (PINNs) are a machine learning technique for solving partial differential equations (PDEs) by incorporating PDEs as loss terms in neural networks and minimizing the loss function during training. Tomographic imaging, a method to reconstruct internal properties from external measurement data, is highly complex and ill-posed, making it an inverse problem. Recently, PINNs have shown significant potential in computational fluid dynamics (CFD) and have advantages in solving inverse problems. However, existing research has primarily focused on semi-inverse Electrical Impedance Tomography (EIT), where internal electric potentials are accessible. The practical full inverse EIT problem, where only boundary voltage measurements are available, remains challenging. To address this, we propose a two-stage hybrid learning framework combining Convolutional Neural Networks (CNNs) and PINNs to solve the full inverse EIT problem. This framework integrates data-driven and model-driven approaches, combines supervised and unsupervised learning, and decouples the forward and inverse problems within the PINN framework in EIT. Stage I: a U-Net constructs an end-to-end mapping from boundary voltage measurements to the internal potential distribution using supervised learning. Stage II: a Multilayer Perceptron (MLP)-based PINN takes the predicted internal potentials as input to solve for the conductivity distribution through unsupervised learning.
On Support Relations Inference and Scene Hierarchy Graph Construction from Point Cloud in Clustered Environments
Apr 22, 2024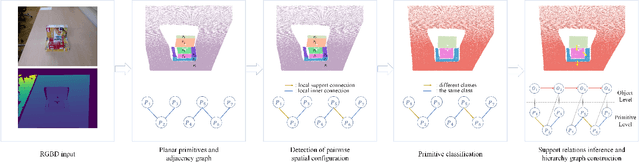
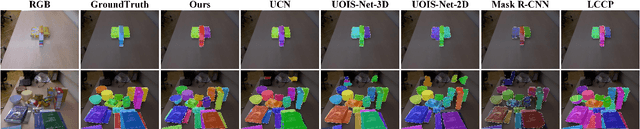
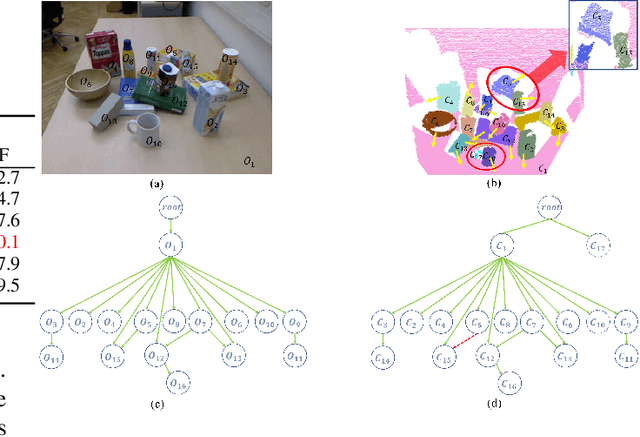
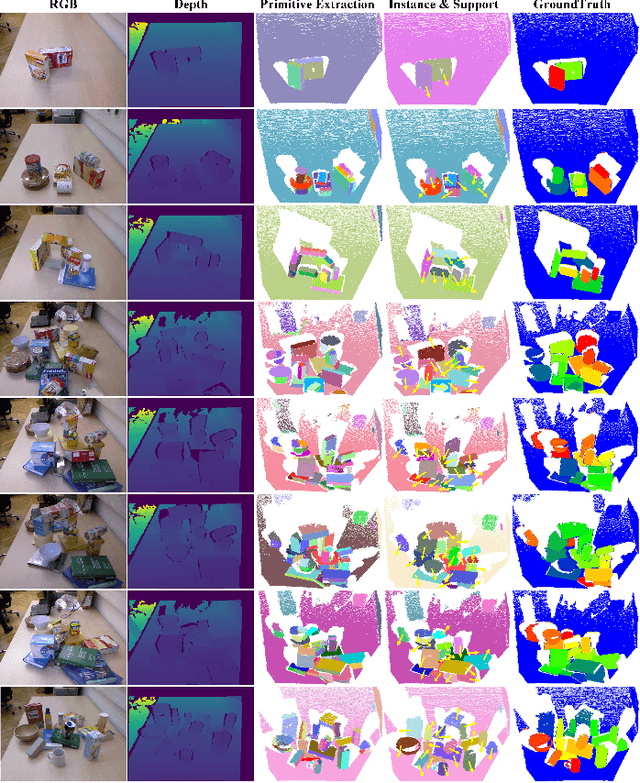
Over the years, scene understanding has attracted a growing interest in computer vision, providing the semantic and physical scene information necessary for robots to complete some particular tasks autonomously. In 3D scenes, rich spatial geometric and topological information are often ignored by RGB-based approaches for scene understanding. In this study, we develop a bottom-up approach for scene understanding that infers support relations between objects from a point cloud. Our approach utilizes the spatial topology information of the plane pairs in the scene, consisting of three major steps. 1) Detection of pairwise spatial configuration: dividing primitive pairs into local support connection and local inner connection; 2) primitive classification: a combinatorial optimization method applied to classify primitives; and 3) support relations inference and hierarchy graph construction: bottom-up support relations inference and scene hierarchy graph construction containing primitive level and object level. Through experiments, we demonstrate that the algorithm achieves excellent performance in primitive classification and support relations inference. Additionally, we show that the scene hierarchy graph contains rich geometric and topological information of objects, and it possesses great scalability for scene understanding.
RaLiBEV: Radar and LiDAR BEV Fusion Learning for Anchor Box Free Object Detection System
Nov 11, 2022Radar, the only sensor that could provide reliable perception capability in all weather conditions at an affordable cost, has been widely accepted as a key supplement to camera and LiDAR in modern advanced driver assistance systems (ADAS) and autonomous driving systems. Recent state-of-the-art works reveal that fusion of radar and LiDAR can lead to robust detection in adverse weather, such as fog. However, these methods still suffer from low accuracy of bounding box estimations. This paper proposes a bird's-eye view (BEV) fusion learning for an anchor box-free object detection system, which uses the feature derived from the radar range-azimuth heatmap and the LiDAR point cloud to estimate the possible objects. Different label assignment strategies have been designed to facilitate the consistency between the classification of foreground or background anchor points and the corresponding bounding box regressions. Furthermore, the performance of the proposed object detector can be further enhanced by employing a novel interactive transformer module. We demonstrated the superior performance of the proposed methods in this paper using the recently published Oxford Radar RobotCar (ORR) dataset. We showed that the accuracy of our system significantly outperforms the other state-of-the-art methods by a large margin.