 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Support Relations Inference and Scene Hierarchy Graph Construction from Point Cloud in Clustered Environments
Paper and Code
Apr 22, 2024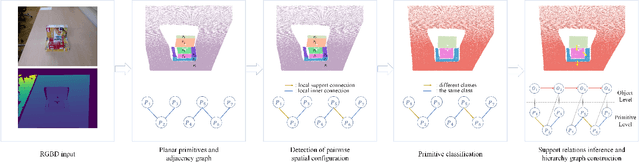
Over the years, scene understanding has attracted a growing interest in computer vision, providing the semantic and physical scene information necessary for robots to complete some particular tasks autonomously. In 3D scenes, rich spatial geometric and topological information are often ignored by RGB-based approaches for scene understanding. In this study, we develop a bottom-up approach for scene understanding that infers support relations between objects from a point cloud. Our approach utilizes the spatial topology information of the plane pairs in the scene, consisting of three major steps. 1) Detection of pairwise spatial configuration: dividing primitive pairs into local support connection and local inner connection; 2) primitive classification: a combinatorial optimization method applied to classify primitives; and 3) support relations inference and hierarchy graph construction: bottom-up support relations inference and scene hierarchy graph construction containing primitive level and object level. Through experiments, we demonstrate that the algorithm achieves excellent performance in primitive classification and support relations inference. Additionally, we show that the scene hierarchy graph contains rich geometric and topological information of objects, and it possesses great scalability for scene understanding.