 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFoundation Models in Remote Sensing: Evolving from Unimodality to Multimodality
Mar 01, 2026Remote sensing (RS) techniques are increasingly crucial for deepening our understanding of the planet. As the volume and diversity of RS data continue to grow exponentially, there is an urgent need for advanced data modeling and understanding capabilities to manage and interpret these vast datasets effectively. Foundation models present significant new growth opportunities and immense potential to revolutionize the RS field. In this paper, we conduct a comprehensive technical survey on foundation models in RS, offering a brand-new perspective by exploring their evolution from unimodality to multimodality. We hope this work serves as a valuable entry point for researchers interested in both foundation models and RS and helps them launch new projects or explore new research topics in this rapidly evolving area. This survey addresses the following three key questions: What are foundation models in RS? Why are foundation models needed in RS? How can we effectively guide junior researchers in gaining a comprehensive and practical understanding of foundation models in RS applications? More specifically, we begin by outlining the background and motivation, emphasizing the importance of foundation models in RS. We then review existing foundation models in RS, systematically categorizing them into unimodal and multimodal approaches. Additionally, we provide a tutorial-like section to guide researchers, especially beginners, on how to train foundation models in RS and apply them to real-world tasks. The survey aims to equip researchers in RS with a deeper and more efficient understanding of foundation models, enabling them to get started easily and effectively apply these models across various RS applications.
STARS: Shared-specific Translation and Alignment for missing-modality Remote Sensing Semantic Segmentation
Jan 24, 2026Multimodal remote sensing technology significantly enhances the understanding of surface semantics by integrating heterogeneous data such as optical images, Synthetic Aperture Radar (SAR), and Digital Surface Models (DSM). However, in practical applications, the missing of modality data (e.g., optical or DSM) is a common and severe challenge, which leads to performance decline in traditional multimodal fusion models. Existing methods for addressing missing modalities still face limitations, including feature collapse and overly generalized recovered features. To address these issues, we propose \textbf{STARS} (\textbf{S}hared-specific \textbf{T}ranslation and \textbf{A}lignment for missing-modality \textbf{R}emote \textbf{S}ensing), a robust semantic segmentation framework for incomplete multimodal inputs. STARS is built on two key designs. First, we introduce an asymmetric alignment mechanism with bidirectional translation and stop-gradient, which effectively prevents feature collapse and reduces sensitivity to hyperparameters. Second, we propose a Pixel-level Semantic sampling Alignment (PSA) strategy that combines class-balanced pixel sampling with cross-modality semantic alignment loss, to mitigate alignment failures caused by severe class imbalance and improve minority-class recognition.
Any-Optical-Model: A Universal Foundation Model for Optical Remote Sensing
Dec 19, 2025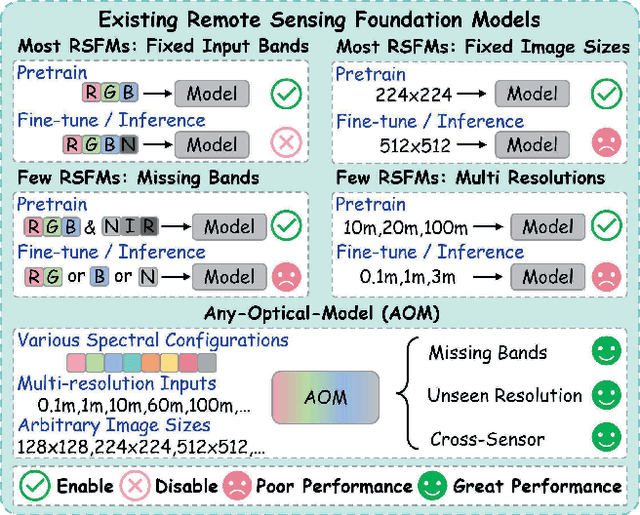
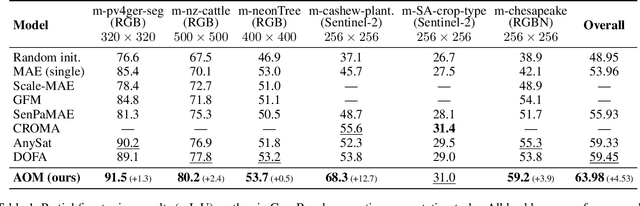
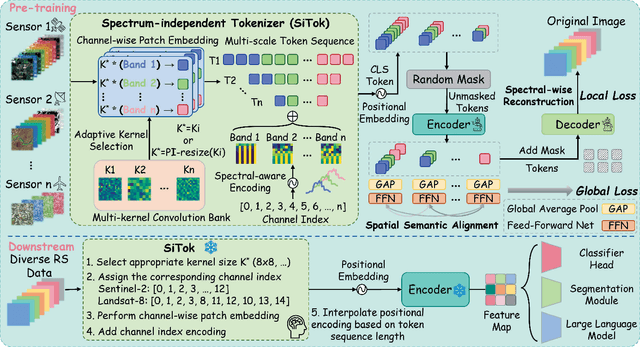
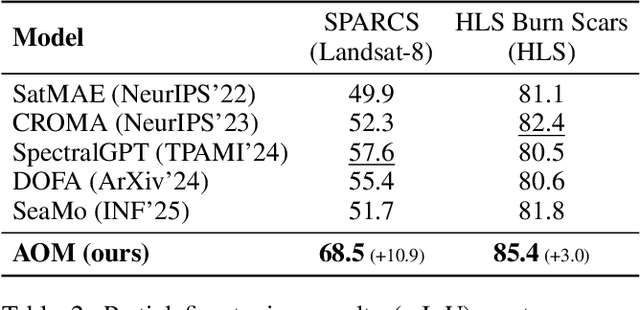
Optical satellites, with their diverse band layouts and ground sampling distances, supply indispensable evidence for tasks ranging from ecosystem surveillance to emergency response. However, significant discrepancies in band composition and spatial resolution across different optical sensors present major challenges for existing Remote Sensing Foundation Models (RSFMs). These models are typically pretrained on fixed band configurations and resolutions, making them vulnerable to real world scenarios involving missing bands, cross sensor fusion, and unseen spatial scales, thereby limiting their generalization and practical deployment. To address these limitations, we propose Any Optical Model (AOM), a universal RSFM explicitly designed to accommodate arbitrary band compositions, sensor types, and resolution scales. To preserve distinctive spectral characteristics even when bands are missing or newly introduced, AOM introduces a spectrum-independent tokenizer that assigns each channel a dedicated band embedding, enabling explicit encoding of spectral identity. To effectively capture texture and contextual patterns from sub-meter to hundred-meter imagery, we design a multi-scale adaptive patch embedding mechanism that dynamically modulates the receptive field. Furthermore, to maintain global semantic consistency across varying resolutions, AOM incorporates a multi-scale semantic alignment mechanism alongside a channel-wise self-supervised masking and reconstruction pretraining strategy that jointly models spectral-spatial relationships. Extensive experiments on over 10 public datasets, including those from Sentinel-2, Landsat, and HLS, demonstrate that AOM consistently achieves state-of-the-art (SOTA) performance under challenging conditions such as band missing, cross sensor, and cross resolution settings.
TSGDiff: Rethinking Synthetic Time Series Generation from a Pure Graph Perspective
Nov 15, 2025Diffusion models have shown great promise in data generation, yet generating time series data remains challenging due to the need to capture complex temporal dependencies and structural patterns. In this paper, we present \textit{TSGDiff}, a novel framework that rethinks time series generation from a graph-based perspective. Specifically, we represent time series as dynamic graphs, where edges are constructed based on Fourier spectrum characteristics and temporal dependencies. A graph neural network-based encoder-decoder architecture is employed to construct a latent space, enabling the diffusion process to model the structural representation distribution of time series effectively. Furthermore, we propose the Topological Structure Fidelity (Topo-FID) score, a graph-aware metric for assessing the structural similarity of time series graph representations. Topo-FID integrates two sub-metrics: Graph Edit Similarity, which quantifies differences in adjacency matrices, and Structural Entropy Similarity, which evaluates the entropy of node degree distributions. This comprehensive metric provides a more accurate assessment of structural fidelity in generated time series. Experiments on real-world datasets demonstrate that \textit{TSGDiff} generates high-quality synthetic time series data generation, faithfully preserving temporal dependencies and structural integrity, thereby advancing the field of synthetic time series generation.
A Weak Penalty Neural ODE for Learning Chaotic Dynamics from Noisy Time Series
Nov 10, 2025Accurate forecasting of complex high-dimensional dynamical systems from observational data is essential for several applications across science and engineering. A key challenge, however, is that real-world measurements are often corrupted by noise, which severely degrades the performance of data-driven models. Particularly, in chaotic dynamical systems, where small errors amplify rapidly, it is challenging to identify a data-driven model from noisy data that achieves short-term accuracy while preserving long-term invariant properties. In this paper, we propose the use of the weak formulation as a complementary approach to the classical strong formulation of data-driven time-series forecasting models. Specifically, we focus on the neural ordinary differential equation (NODE) architecture. Unlike the standard strong formulation, which relies on the discretization of the NODE followed by optimization, the weak formulation constrains the model using a set of integrated residuals over temporal subdomains. While such a formulation yields an effective NODE model, we discover that the performance of a NODE can be further enhanced by employing this weak formulation as a penalty alongside the classical strong formulation-based learning. Through numerical demonstrations, we illustrate that our proposed training strategy, which we coined as the Weak-Penalty NODE (WP-NODE), achieves state-of-the-art forecasting accuracy and exceptional robustness across benchmark chaotic dynamical systems.
FlexiMo: A Flexible Remote Sensing Foundation Model
Mar 31, 2025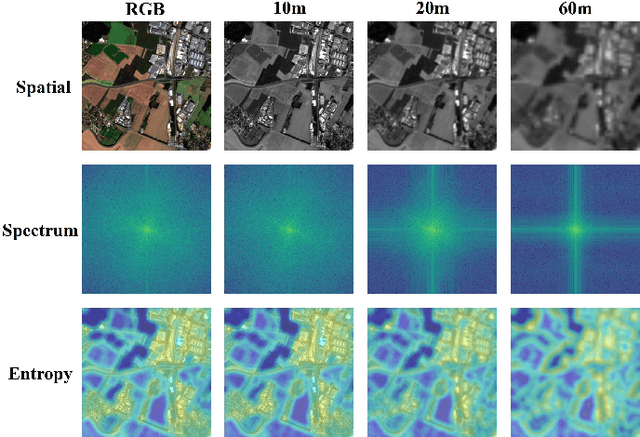
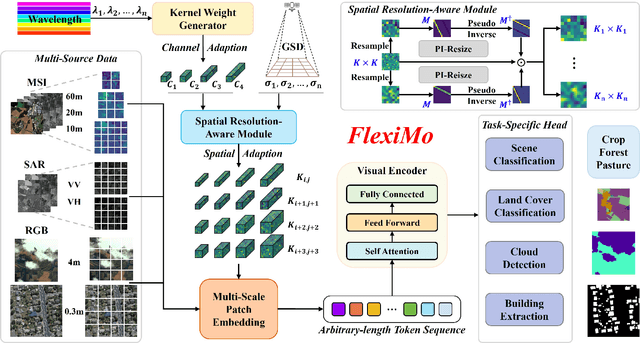
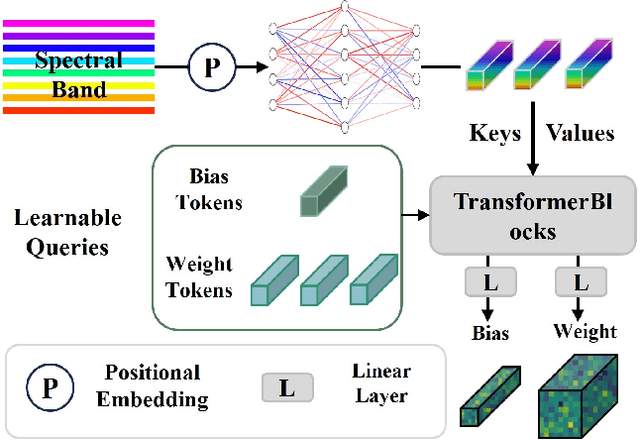
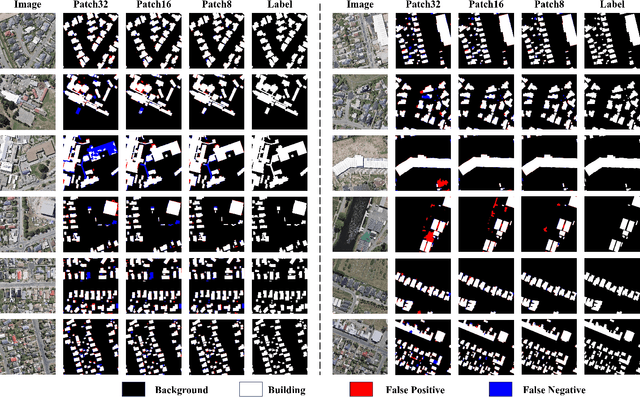
The rapid expansion of multi-source satellite imagery drives innovation in Earth observation, opening unprecedented opportunities for Remote Sensing Foundation Models to harness diverse data. However, many existing models remain constrained by fixed spatial resolutions and patch sizes, limiting their ability to fully exploit the heterogeneous spatial characteristics inherent in satellite imagery. To address these challenges, we propose FlexiMo, a flexible remote sensing foundation model that endows the pre-trained model with the flexibility to adapt to arbitrary spatial resolutions. Central to FlexiMo is a spatial resolution-aware module that employs a parameter-free alignment embedding mechanism to dynamically recalibrate patch embeddings based on the input image's resolution and dimensions. This design not only preserves critical token characteristics and ensures multi-scale feature fidelity but also enables efficient feature extraction without requiring modifications to the underlying network architecture. In addition, FlexiMo incorporates a lightweight channel adaptation module that leverages prior spectral information from sensors. This mechanism allows the model to process images with varying numbers of channels while maintaining the data's intrinsic physical properties. Extensive experiments on diverse multimodal, multi-resolution, and multi-scale datasets demonstrate that FlexiMo significantly enhances model generalization and robustness. In particular, our method achieves outstanding performance across a range of downstream tasks, including scene classification, land cover classification, urban building segmentation, and cloud detection. By enabling parameter-efficient and physically consistent adaptation, FlexiMo paves the way for more adaptable and effective foundation models in real-world remote sensing applications.
SALSA-RL: Stability Analysis in the Latent Space of Actions for Reinforcement Learning
Feb 21, 2025



Modern deep reinforcement learning (DRL) methods have made significant advances in handling continuous action spaces. However, real-world control systems--especially those requiring precise and reliable performance--often demand formal stability, and existing DRL approaches typically lack explicit mechanisms to ensure or analyze stability. To address this limitation, we propose SALSA-RL (Stability Analysis in the Latent Space of Actions), a novel RL framework that models control actions as dynamic, time-dependent variables evolving within a latent space. By employing a pre-trained encoder-decoder and a state-dependent linear system, our approach enables both stability analysis and interpretability. We demonstrated that SALSA-RL can be deployed in a non-invasive manner for assessing the local stability of actions from pretrained RL agents without compromising on performance across diverse benchmark environments. By enabling a more interpretable analysis of action generation, SALSA-RL provides a powerful tool for advancing the design, analysis, and theoretical understanding of RL systems.
SeaMo: A Multi-Seasonal and Multimodal Remote Sensing Foundation Model
Dec 26, 2024



Remote Sensing (RS) data contains a wealth of multi-dimensional information crucial for Earth observation. Owing to its vast volume, diverse sources, and temporal properties, RS data is highly suitable for the development of large Visual Foundation Models (VFMs). VFMs act as robust feature extractors, learning from extensive RS data, and are subsequently fine-tuned for deployment in various geoscientific tasks. However, current VFMs in the RS domain are predominantly pretrained and tailored exclusively for specific characteristics of RS imagery, neglecting the potential of utilizing the multi-dimensional properties of RS data. Therefore, in this work, we propose SeaMo, a pioneering visual foundation model that integrates multi-seasonal and multimodal information in the RS field. SeaMo is designed to harness multiple properties of RS data. Within the masked image modeling framework, we employ non-aligned cropping techniques to extract spatial properties, use multi-source inputs for multimodal integration, and incorporate temporal-multimodal fusion blocks for effective assimilation of multi-seasonal data. SeaMo explicitly models the multi-dimensional properties of RS data, making the model more comprehensive, robust, and versatile. We applied SeaMo to several downstream geoscience tasks, which demonstrated exceptional performance. Extensive ablation studies were conducted to validate the model's superiority.
Mechanics-Informed Autoencoder Enables Automated Detection and Localization of Unforeseen Structural Damage
Feb 23, 2024Structural health monitoring (SHM) is vital for ensuring the safety and longevity of structures like buildings and bridges. As the volume and scale of structures and the impact of their failure continue to grow, there is a dire need for SHM techniques that are scalable, inexpensive, operate passively without human intervention, and customized for each mechanical structure without the need for complex baseline models. We present a novel "deploy-and-forget" approach for automated detection and localization of damages in structures. It is based on a synergistic combination of fully passive measurements from inexpensive sensors and a mechanics-informed autoencoder. Once deployed, our solution continuously learns and adapts a bespoke baseline model for each structure, learning from its undamaged state's response characteristics. After learning from just 3 hours of data, it can autonomously detect and localize different types of unforeseen damage. Results from numerical simulations and experiments indicate that incorporating the mechanical characteristics into the variational autoencoder allows for up to 35\% earlier detection and localization of damage over a standard autoencoder. Our approach holds substantial promise for a significant reduction in human intervention and inspection costs and enables proactive and preventive maintenance strategies, thus extending the lifespan, reliability, and sustainability of civil infrastructures.
SpectralGPT: Spectral Foundation Model
Nov 25, 2023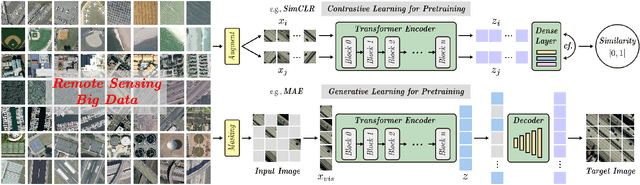
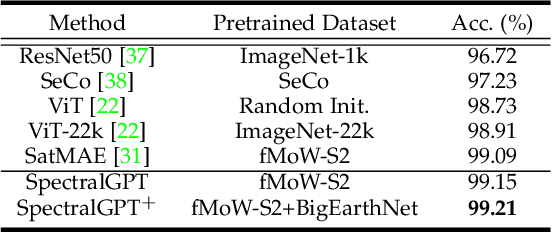
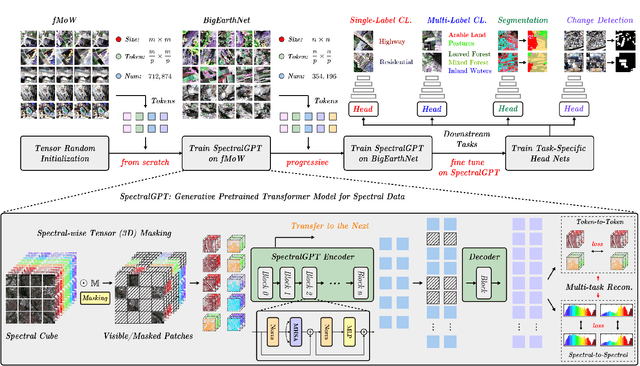
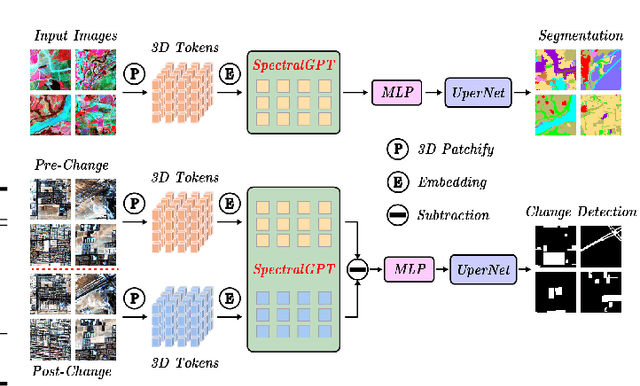
The foundation model has recently garnered significant attention due to its potential to revolutionize the field of visual representation learning in a self-supervised manner. While most foundation models are tailored to effectively process RGB images for various visual tasks, there is a noticeable gap in research focused on spectral data, which offers valuable information for scene understanding, especially in remote sensing (RS) applications. To fill this gap, we created for the first time a universal RS foundation model, named SpectralGPT, which is purpose-built to handle spectral RS images using a novel 3D generative pretrained transformer (GPT). Compared to existing foundation models, SpectralGPT 1) accommodates input images with varying sizes, resolutions, time series, and regions in a progressive training fashion, enabling full utilization of extensive RS big data; 2) leverages 3D token generation for spatial-spectral coupling; 3) captures spectrally sequential patterns via multi-target reconstruction; 4) trains on one million spectral RS images, yielding models with over 600 million parameters. Our evaluation highlights significant performance improvements with pretrained SpectralGPT models, signifying substantial potential in advancing spectral RS big data applications within the field of geoscience across four downstream tasks: single/multi-label scene classification, semantic segmentation, and change detection.