 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRISM: Festina Lente Proactivity -- Risk-Sensitive, Uncertainty-Aware Deliberation for Proactive Agents
Feb 02, 2026Proactive agents must decide not only what to say but also whether and when to intervene. Many current systems rely on brittle heuristics or indiscriminate long reasoning, which offers little control over the benefit-burden tradeoff. We formulate the problem as cost-sensitive selective intervention and present PRISM, a novel framework that couples a decision-theoretic gate with a dual-process reasoning architecture. At inference time, the agent intervenes only when a calibrated probability of user acceptance exceeds a threshold derived from asymmetric costs of missed help and false alarms. Inspired by festina lente (Latin: "make haste slowly"), we gate by an acceptance-calibrated, cost-derived threshold and invoke a resource-intensive Slow mode with counterfactual checks only near the decision boundary, concentrating computation on ambiguous and high-stakes cases. Training uses gate-aligned, schema-locked distillation: a teacher running the full PRISM pipeline provides dense, executable supervision on unlabeled interaction traces, while the student learns a response policy that is explicitly decoupled from the intervention gate to enable tunable and auditable control. On ProactiveBench, PRISM reduces false alarms by 22.78% and improves F1 by 20.14% over strong baselines. These results show that principled decision-theoretic gating, paired with selective slow reasoning and aligned distillation, yields proactive agents that are precise, computationally efficient, and controllable. To facilitate reproducibility, we release our code, models, and resources at https://prism-festinalente.github.io/; all experiments use the open-source ProactiveBench benchmark.
Youtu-VL: Unleashing Visual Potential via Unified Vision-Language Supervision
Jan 27, 2026Despite the significant advancements represented by Vision-Language Models (VLMs), current architectures often exhibit limitations in retaining fine-grained visual information, leading to coarse-grained multimodal comprehension. We attribute this deficiency to a suboptimal training paradigm inherent in prevailing VLMs, which exhibits a text-dominant optimization bias by conceptualizing visual signals merely as passive conditional inputs rather than supervisory targets. To mitigate this, we introduce Youtu-VL, a framework leveraging the Vision-Language Unified Autoregressive Supervision (VLUAS) paradigm, which fundamentally shifts the optimization objective from ``vision-as-input'' to ``vision-as-target.'' By integrating visual tokens directly into the prediction stream, Youtu-VL applies unified autoregressive supervision to both visual details and linguistic content. Furthermore, we extend this paradigm to encompass vision-centric tasks, enabling a standard VLM to perform vision-centric tasks without task-specific additions. Extensive empirical evaluations demonstrate that Youtu-VL achieves competitive performance on both general multimodal tasks and vision-centric tasks, establishing a robust foundation for the development of comprehensive generalist visual agents.
Curiosity Driven Knowledge Retrieval for Mobile Agents
Jan 27, 2026Mobile agents have made progress toward reliable smartphone automation, yet performance in complex applications remains limited by incomplete knowledge and weak generalization to unseen environments. We introduce a curiosity driven knowledge retrieval framework that formalizes uncertainty during execution as a curiosity score. When this score exceeds a threshold, the system retrieves external information from documentation, code repositories, and historical trajectories. Retrieved content is organized into structured AppCards, which encode functional semantics, parameter conventions, interface mappings, and interaction patterns. During execution, an enhanced agent selectively integrates relevant AppCards into its reasoning process, thereby compensating for knowledge blind spots and improving planning reliability. Evaluation on the AndroidWorld benchmark shows consistent improvements across backbones, with an average gain of six percentage points and a new state of the art success rate of 88.8\% when combined with GPT-5. Analysis indicates that AppCards are particularly effective for multi step and cross application tasks, while improvements depend on the backbone model. Case studies further confirm that AppCards reduce ambiguity, shorten exploration, and support stable execution trajectories. Task trajectories are publicly available at https://lisalsj.github.io/Droidrun-appcard/.
SRU-Pix2Pix: A Fusion-Driven Generator Network for Medical Image Translation with Few-Shot Learning
Jan 08, 2026Magnetic Resonance Imaging (MRI) provides detailed tissue information, but its clinical application is limited by long acquisition time, high cost, and restricted resolution. Image translation has recently gained attention as a strategy to address these limitations. Although Pix2Pix has been widely applied in medical image translation, its potential has not been fully explored. In this study, we propose an enhanced Pix2Pix framework that integrates Squeeze-and-Excitation Residual Networks (SEResNet) and U-Net++ to improve image generation quality and structural fidelity. SEResNet strengthens critical feature representation through channel attention, while U-Net++ enhances multi-scale feature fusion. A simplified PatchGAN discriminator further stabilizes training and refines local anatomical realism. Experimental results demonstrate that under few-shot conditions with fewer than 500 images, the proposed method achieves consistent structural fidelity and superior image quality across multiple intra-modality MRI translation tasks, showing strong generalization ability. These results suggest an effective extension of Pix2Pix for medical image translation.
Youtu-LLM: Unlocking the Native Agentic Potential for Lightweight Large Language Models
Dec 31, 2025We introduce Youtu-LLM, a lightweight yet powerful language model that harmonizes high computational efficiency with native agentic intelligence. Unlike typical small models that rely on distillation, Youtu-LLM (1.96B) is pre-trained from scratch to systematically cultivate reasoning and planning capabilities. The key technical advancements are as follows: (1) Compact Architecture with Long-Context Support: Built on a dense Multi-Latent Attention (MLA) architecture with a novel STEM-oriented vocabulary, Youtu-LLM supports a 128k context window. This design enables robust long-context reasoning and state tracking within a minimal memory footprint, making it ideal for long-horizon agent and reasoning tasks. (2) Principled "Commonsense-STEM-Agent" Curriculum: We curated a massive corpus of approximately 11T tokens and implemented a multi-stage training strategy. By progressively shifting the pre-training data distribution from general commonsense to complex STEM and agentic tasks, we ensure the model acquires deep cognitive abilities rather than superficial alignment. (3) Scalable Agentic Mid-training: Specifically for the agentic mid-training, we employ diverse data construction schemes to synthesize rich and varied trajectories across math, coding, and tool-use domains. This high-quality data enables the model to internalize planning and reflection behaviors effectively. Extensive evaluations show that Youtu-LLM sets a new state-of-the-art for sub-2B LLMs. On general benchmarks, it achieves competitive performance against larger models, while on agent-specific tasks, it significantly surpasses existing SOTA baselines, demonstrating that lightweight models can possess strong intrinsic agentic capabilities.
Youtu-Agent: Scaling Agent Productivity with Automated Generation and Hybrid Policy Optimization
Dec 31, 2025Existing Large Language Model (LLM) agent frameworks face two significant challenges: high configuration costs and static capabilities. Building a high-quality agent often requires extensive manual effort in tool integration and prompt engineering, while deployed agents struggle to adapt to dynamic environments without expensive fine-tuning. To address these issues, we propose \textbf{Youtu-Agent}, a modular framework designed for the automated generation and continuous evolution of LLM agents. Youtu-Agent features a structured configuration system that decouples execution environments, toolkits, and context management, enabling flexible reuse and automated synthesis. We introduce two generation paradigms: a \textbf{Workflow} mode for standard tasks and a \textbf{Meta-Agent} mode for complex, non-standard requirements, capable of automatically generating tool code, prompts, and configurations. Furthermore, Youtu-Agent establishes a hybrid policy optimization system: (1) an \textbf{Agent Practice} module that enables agents to accumulate experience and improve performance through in-context optimization without parameter updates; and (2) an \textbf{Agent RL} module that integrates with distributed training frameworks to enable scalable and stable reinforcement learning of any Youtu-Agents in an end-to-end, large-scale manner. Experiments demonstrate that Youtu-Agent achieves state-of-the-art performance on WebWalkerQA (71.47\%) and GAIA (72.8\%) using open-weight models. Our automated generation pipeline achieves over 81\% tool synthesis success rate, while the Practice module improves performance on AIME 2024/2025 by +2.7\% and +5.4\% respectively. Moreover, our Agent RL training achieves 40\% speedup with steady performance improvement on 7B LLMs, enhancing coding/reasoning and searching capabilities respectively up to 35\% and 21\% on Maths and general/multi-hop QA benchmarks.
SmartSnap: Proactive Evidence Seeking for Self-Verifying Agents
Dec 26, 2025Agentic reinforcement learning (RL) holds great promise for the development of autonomous agents under complex GUI tasks, but its scalability remains severely hampered by the verification of task completion. Existing task verification is treated as a passive, post-hoc process: a verifier (i.e., rule-based scoring script, reward or critic model, and LLM-as-a-Judge) analyzes the agent's entire interaction trajectory to determine if the agent succeeds. Such processing of verbose context that contains irrelevant, noisy history poses challenges to the verification protocols and therefore leads to prohibitive cost and low reliability. To overcome this bottleneck, we propose SmartSnap, a paradigm shift from this passive, post-hoc verification to proactive, in-situ self-verification by the agent itself. We introduce the Self-Verifying Agent, a new type of agent designed with dual missions: to not only complete a task but also to prove its accomplishment with curated snapshot evidences. Guided by our proposed 3C Principles (Completeness, Conciseness, and Creativity), the agent leverages its accessibility to the online environment to perform self-verification on a minimal, decisive set of snapshots. Such evidences are provided as the sole materials for a general LLM-as-a-Judge verifier to determine their validity and relevance. Experiments on mobile tasks across model families and scales demonstrate that our SmartSnap paradigm allows training LLM-driven agents in a scalable manner, bringing performance gains up to 26.08% and 16.66% respectively to 8B and 30B models. The synergizing between solution finding and evidence seeking facilitates the cultivation of efficient, self-verifying agents with competitive performance against DeepSeek V3.1 and Qwen3-235B-A22B.
Learn the Ropes, Then Trust the Wins: Self-imitation with Progressive Exploration for Agentic Reinforcement Learning
Sep 26, 2025
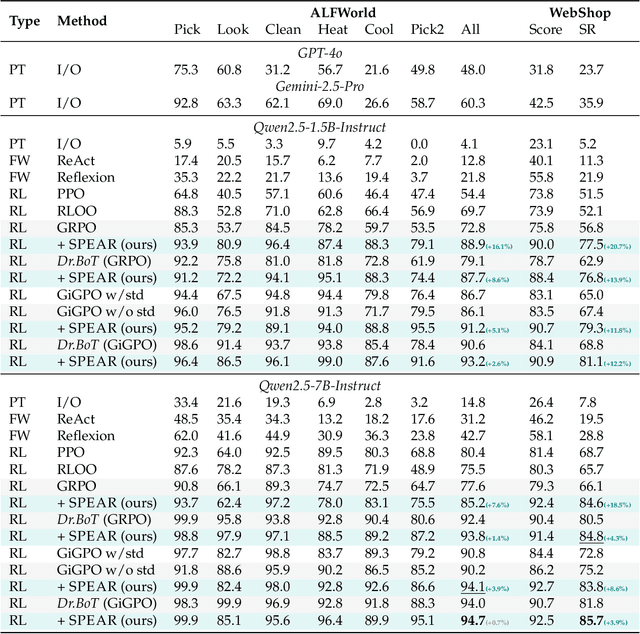
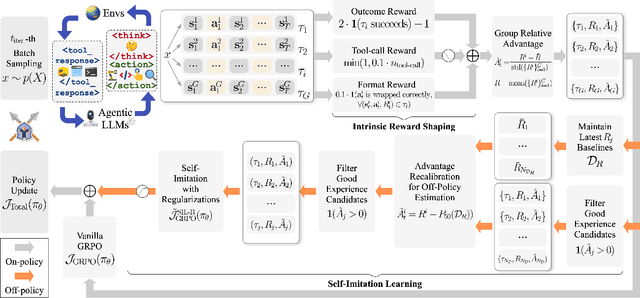
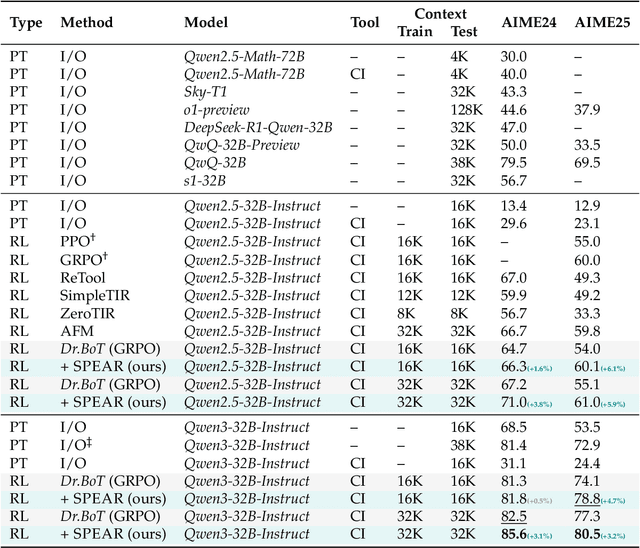
Reinforcement learning (RL) is the dominant paradigm for sharpening strategic tool use capabilities of LLMs on long-horizon, sparsely-rewarded agent tasks, yet it faces a fundamental challenge of exploration-exploitation trade-off. Existing studies stimulate exploration through the lens of policy entropy, but such mechanical entropy maximization is prone to RL training instability due to the multi-turn distribution shifting. In this paper, we target the progressive exploration-exploitation balance under the guidance of the agent own experiences without succumbing to either entropy collapsing or runaway divergence. We propose SPEAR, a curriculum-based self-imitation learning (SIL) recipe for training agentic LLMs. It extends the vanilla SIL framework, where a replay buffer stores self-generated promising trajectories for off-policy update, by gradually steering the policy evolution within a well-balanced range of entropy across stages. Specifically, our approach incorporates a curriculum to manage the exploration process, utilizing intrinsic rewards to foster skill-level exploration and facilitating action-level exploration through SIL. At first, the auxiliary tool call reward plays a critical role in the accumulation of tool-use skills, enabling broad exposure to the unfamiliar distributions of the environment feedback with an upward entropy trend. As training progresses, self-imitation gets strengthened to exploit existing successful patterns from replayed experiences for comparative action-level exploration, accelerating solution iteration without unbounded entropy growth. To further stabilize training, we recalibrate the advantages of experiences in the replay buffer to address the potential policy drift. Reugularizations such as the clipping of tokens with high covariance between probability and advantage are introduced to the trajectory-level entropy control to curb over-confidence.
The Choice of Divergence: A Neglected Key to Mitigating Diversity Collapse in Reinforcement Learning with Verifiable Reward
Sep 09, 2025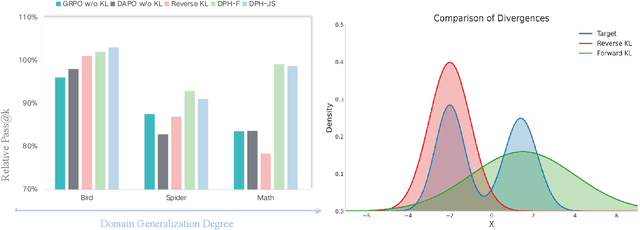
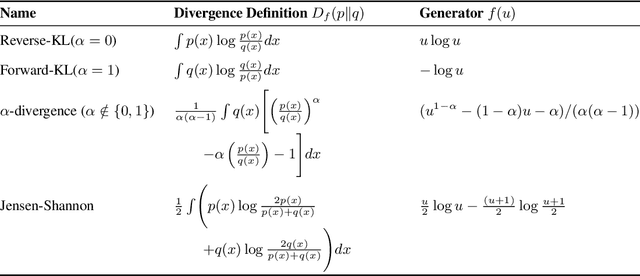
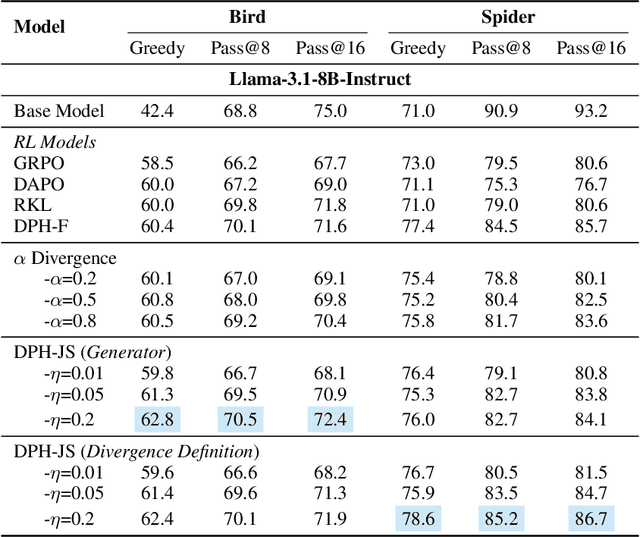
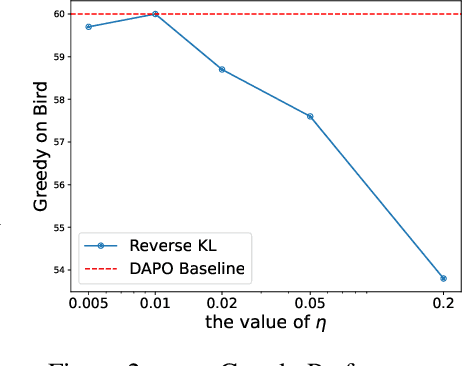
A central paradox in fine-tuning Large Language Models (LLMs) with Reinforcement Learning with Verifiable Reward (RLVR) is the frequent degradation of multi-attempt performance (Pass@k) despite improvements in single-attempt accuracy (Pass@1). This is often accompanied by catastrophic forgetting, where models lose previously acquired skills. While various methods have been proposed, the choice and function of the divergence term have been surprisingly unexamined as a proactive solution. We argue that standard RLVR objectives -- both those using the mode-seeking reverse KL-divergence and those forgoing a divergence term entirely -- lack a crucial mechanism for knowledge retention. The reverse-KL actively accelerates this decay by narrowing the policy, while its absence provides no safeguard against the model drifting from its diverse knowledge base. We propose a fundamental shift in perspective: using the divergence term itself as the solution. Our framework, Diversity-Preserving Hybrid RL (DPH-RL), leverages mass-covering f-divergences (like forward-KL and JS-divergence) to function as a rehearsal mechanism. By continuously referencing the initial policy, this approach forces the model to maintain broad solution coverage. Extensive experiments on math and SQL generation demonstrate that DPH-RL not only resolves the Pass@k degradation but improves both Pass@1 and Pass@k in- and out-of-domain. Additionally, DPH-RL is more training-efficient because it computes f-divergence using generator functions, requiring only sampling from the initial policy and no online reference model. Our work highlights a crucial, overlooked axis for improving RLVR, demonstrating that the proper selection of a divergence measure is a powerful tool for building more general and diverse reasoning models.
Guess What I am Thinking: A Benchmark for Inner Thought Reasoning of Role-Playing Language Agents
Mar 11, 2025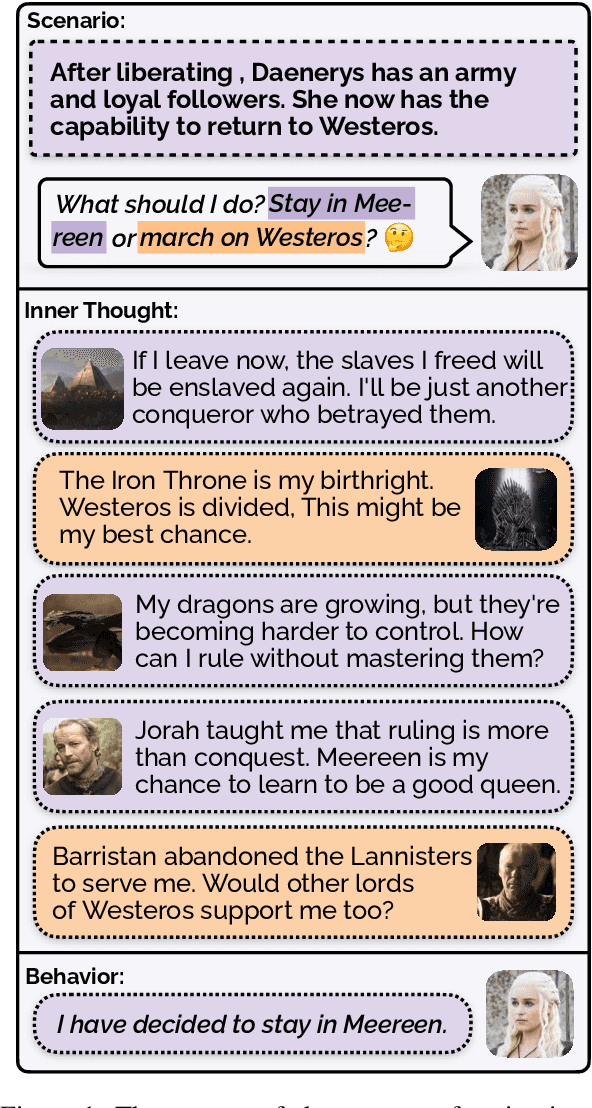
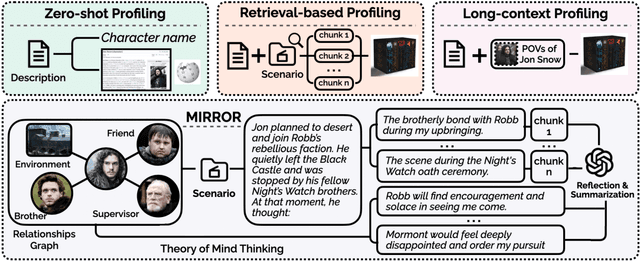
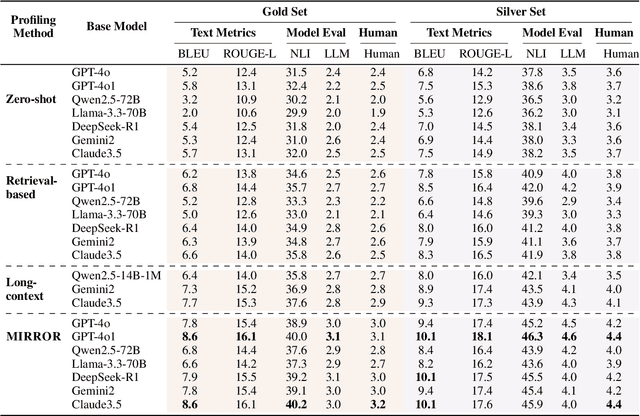
Recent advances in LLM-based role-playing language agents (RPLAs) have attracted broad attention in various applications. While chain-of-thought reasoning has shown importance in many tasks for LLMs, the internal thinking processes of RPLAs remain unexplored. Understanding characters' inner thoughts is crucial for developing advanced RPLAs. In this paper, we introduce ROLETHINK, a novel benchmark constructed from literature for evaluating character thought generation. We propose the task of inner thought reasoning, which includes two sets: the gold set that compares generated thoughts with original character monologues, and the silver set that uses expert synthesized character analyses as references. To address this challenge, we propose MIRROR, a chain-of-thought approach that generates character thoughts by retrieving memories, predicting character reactions, and synthesizing motivations. Through extensive experiments, we demonstrate the importance of inner thought reasoning for RPLAs, and MIRROR consistently outperforms existing methods. Resources are available at https://github.com/airaer1998/RPA_Thought.