 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContrastive Balancing Representation Learning for Heterogeneous Dose-Response Curves Estimation
Mar 21, 2024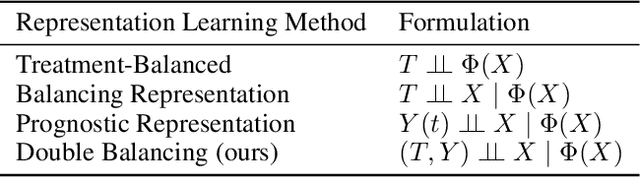
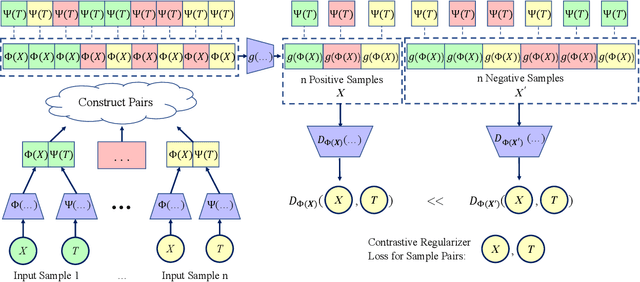
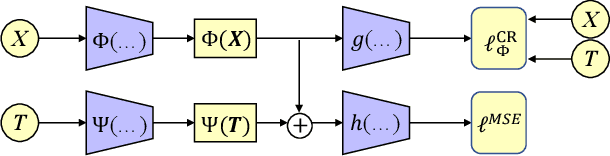
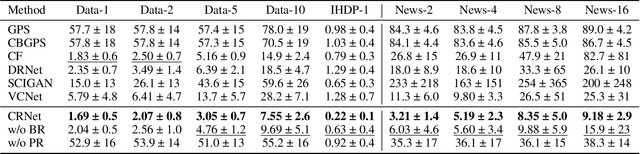
Estimating the individuals' potential response to varying treatment doses is crucial for decision-making in areas such as precision medicine and management science. Most recent studies predict counterfactual outcomes by learning a covariate representation that is independent of the treatment variable. However, such independence constraints neglect much of the covariate information that is useful for counterfactual prediction, especially when the treatment variables are continuous. To tackle the above issue, in this paper, we first theoretically demonstrate the importance of the balancing and prognostic representations for unbiased estimation of the heterogeneous dose-response curves, that is, the learned representations are constrained to satisfy the conditional independence between the covariates and both of the treatment variables and the potential responses. Based on this, we propose a novel Contrastive balancing Representation learning Network using a partial distance measure, called CRNet, for estimating the heterogeneous dose-response curves without losing the continuity of treatments. Extensive experiments are conducted on synthetic and real-world datasets demonstrating that our proposal significantly outperforms previous methods.
RDE: A Hybrid Policy Framework for Multi-Agent Path Finding Problem
Nov 03, 2023


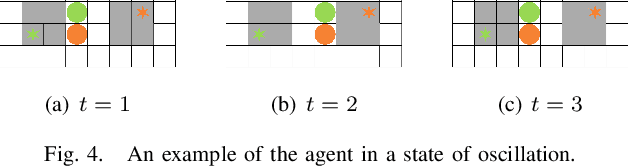
Multi-agent path finding (MAPF) is an abstract model for the navigation of multiple robots in warehouse automation, where multiple robots plan collision-free paths from the start to goal positions. Reinforcement learning (RL) has been employed to develop partially observable distributed MAPF policies that can be scaled to any number of agents. However, RL-based MAPF policies often get agents stuck in deadlock due to warehouse automation's dense and structured obstacles. This paper proposes a novel hybrid MAPF policy, RDE, based on switching among the RL-based MAPF policy, the Distance heat map (DHM)-based policy and the Escape policy. The RL-based policy is used for coordination among agents. In contrast, when no other agents are in the agent's field of view, it can get the next action by querying the DHM. The escape policy that randomly selects valid actions can help agents escape the deadlock. We conduct simulations on warehouse-like structured grid maps using state-of-the-art RL-based MAPF policies (DHC and DCC), which show that RDE can significantly improve their performance.
Long-term Causal Effects Estimation via Latent Surrogates Representation Learning
Aug 09, 2022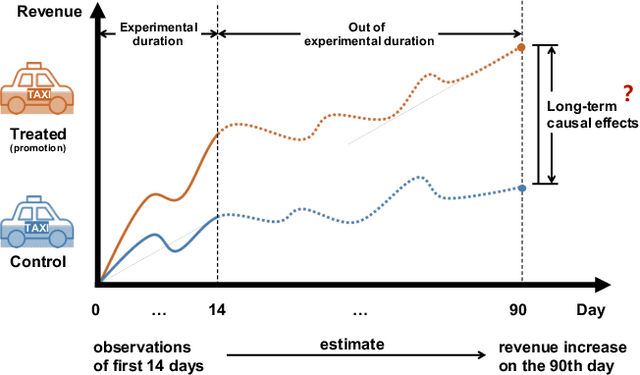
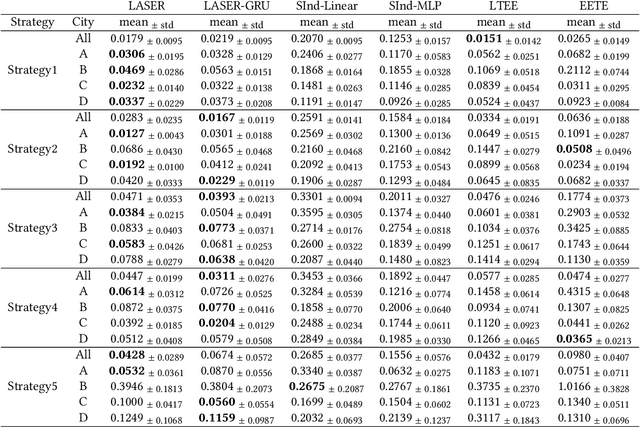
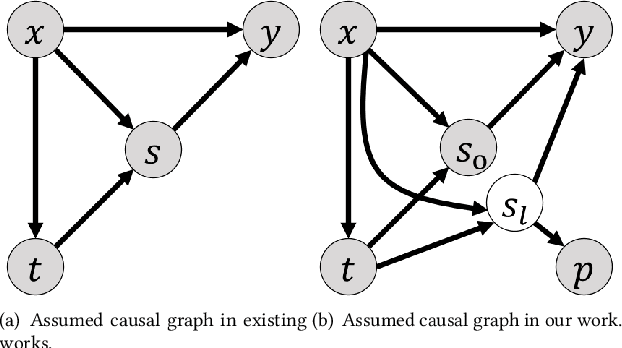
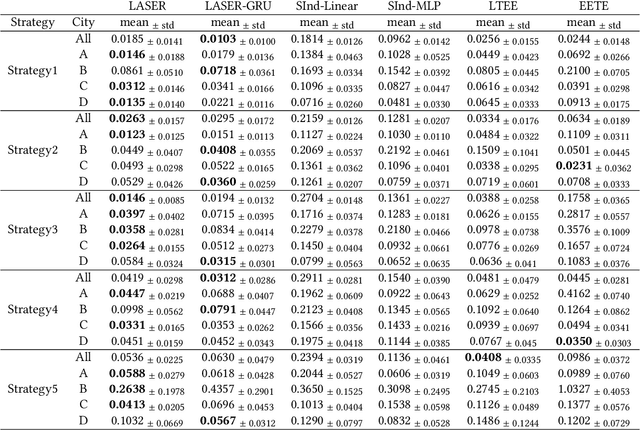
Estimating long-term causal effects based on short-term surrogates is a significant but challenging problem in many real-world applications, e.g., marketing and medicine. Despite its success in certain domains, most existing methods estimate causal effects in an idealistic and simplistic way - ignoring the causal structure among short-term outcomes and treating all of them as surrogates. However, such methods cannot be well applied to real-world scenarios, in which the partially observed surrogates are mixed with their proxies among short-term outcomes. To this end, we develop our flexible method, Laser, to estimate long-term causal effects in the more realistic situation that the surrogates are observed or have observed proxies.Given the indistinguishability between the surrogates and proxies, we utilize identifiable variational auto-encoder (iVAE) to recover the whole valid surrogates on all the surrogates candidates without the need of distinguishing the observed surrogates or the proxies of latent surrogates. With the help of the recovered surrogates, we further devise an unbiased estimation of long-term causal effects. Extensive experimental results on the real-world and semi-synthetic datasets demonstrate the effectiveness of our proposed method.
GCF: Generalized Causal Forest for Heterogeneous Treatment Effect Estimation in Online Marketplace
Mar 21, 2022

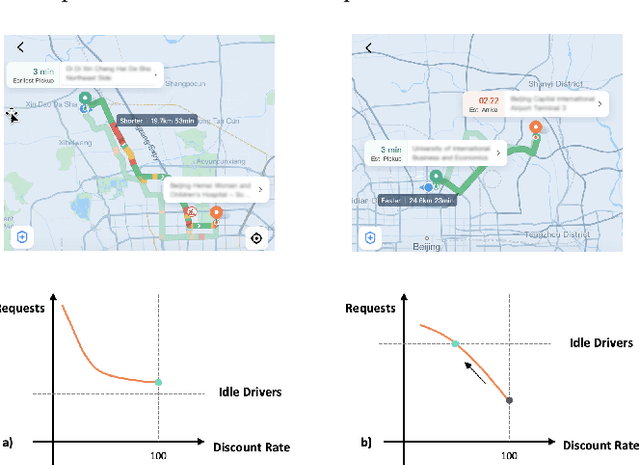
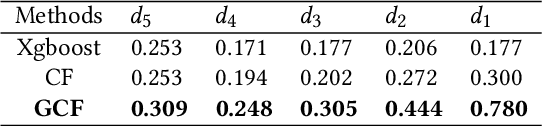
Uplift modeling is a rapidly growing approach that utilizes machine learning and causal inference methods to estimate the heterogeneous treatment effects. It has been widely adopted and applied to online marketplaces to assist large-scale decision-making in recent years. The existing popular methods, like forest-based modeling, either work only for discrete treatments or make partially linear or parametric assumptions that may suffer from model misspecification. To alleviate these problems, we extend causal forest (CF) with non-parametric dose-response functions (DRFs) that can be estimated locally using a kernel-based doubly robust estimator. Moreover, we propose a distance-based splitting criterion in the functional space of conditional DRFs to capture the heterogeneity for the continuous treatments. We call the proposed algorithm generalized causal forest (GCF) as it generalizes the use case of CF to a much broader setup. We show the effectiveness of GCF by comparing it to popular uplift modeling models on both synthetic and real-world datasets. We implement GCF in Spark and successfully deploy it into DiDi's real-time pricing system. Online A/B testing results further validate the superiority of GCF.
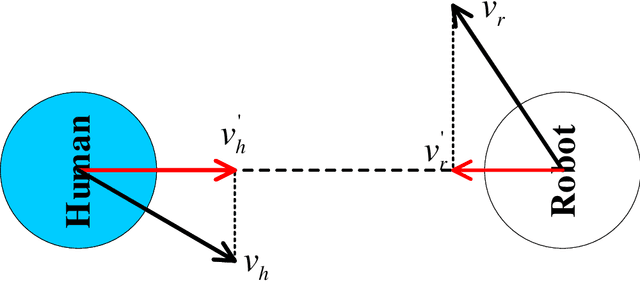
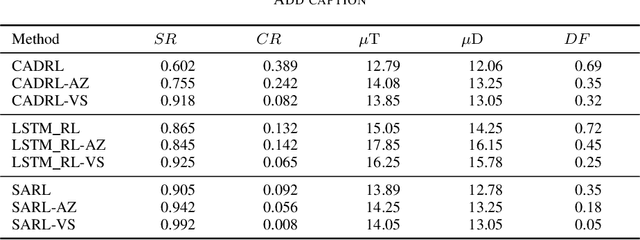
Relative velocity-based reward functions for crowd navigation of robots
Jan 14, 2022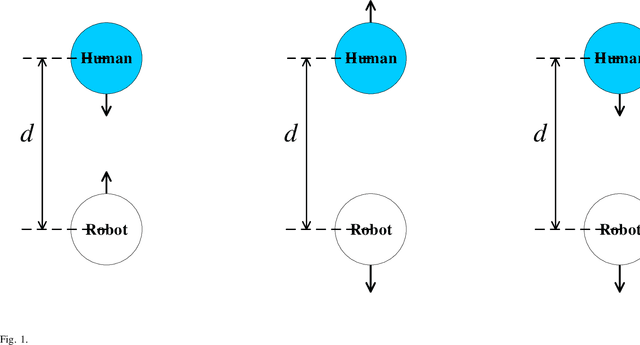
The four-wheeled Mecanum robot is widely used in various industries due to its maneuverability and strong load capacity, which is suitable for performing precise transportation tasks in a narrow environment, but while the Mecanum wheel robot has mobility, it also consumes more energy than ordinary robots. The power consumed by the Mecanum wheel mobile robot varies enormously depending on their operating regimes and environments. Therefore, only knowing the working environment of the robot and the accurate power consumption model can we accurately predict the power consumption of the robot. In order to increase the appli-cable scenarios of energy consumption modeling for Mecanum wheel robots and improve the accuracy of energy consumption modeling, this paper focuses on various factors that affect the energy consumption of the Mecanum wheel robot, such as motor temperature, terrain, the center of gravity position, etc. The model is derived from the kinematic and kinetic model combined with electrical engineering and energy flow principles. The model has been simulated in MATLAB and experimentally validated with the four-wheeled Mecanum robot platform in our lab. Experimental results show that the model is 90% accurate. The results of energy consumption modeling can help robots to save energy by helping them to perform rational path planning and task planning.
Meta Graph Attention on Heterogeneous Graph with Node-Edge Co-evolution
Oct 09, 2020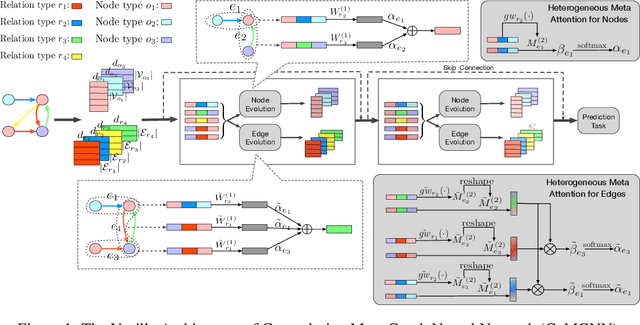
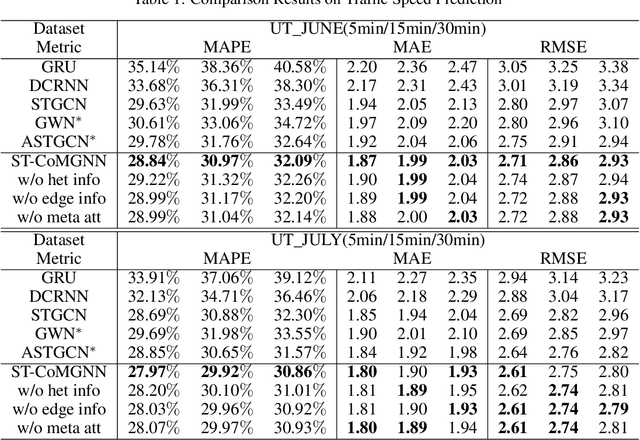
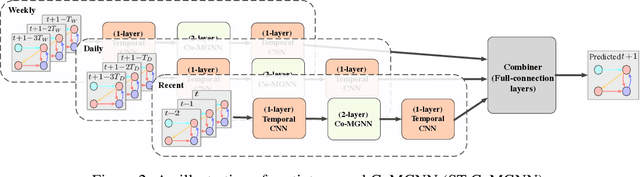

Graph neural networks have become an important tool for modeling structured data. In many real-world systems, intricate hidden information may exist, e.g., heterogeneity in nodes/edges, static node/edge attributes, and spatiotemporal node/edge features. However, most existing methods only take part of the information into consideration. In this paper, we present the Co-evolved Meta Graph Neural Network (CoMGNN), which applies meta graph attention to heterogeneous graphs with co-evolution of node and edge states. We further propose a spatiotemporal adaption of CoMGNN (ST-CoMGNN) for modeling spatiotemporal patterns on nodes and edges. We conduct experiments on two large-scale real-world datasets. Experimental results show that our models significantly outperform the state-of-the-art methods, demonstrating the effectiveness of encoding diverse information from different aspects.
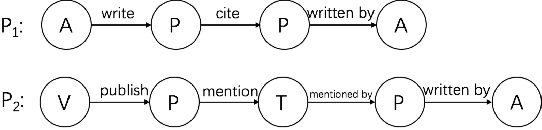
An Attention-based Graph Neural Network for Heterogeneous Structural Learning
Dec 19, 2019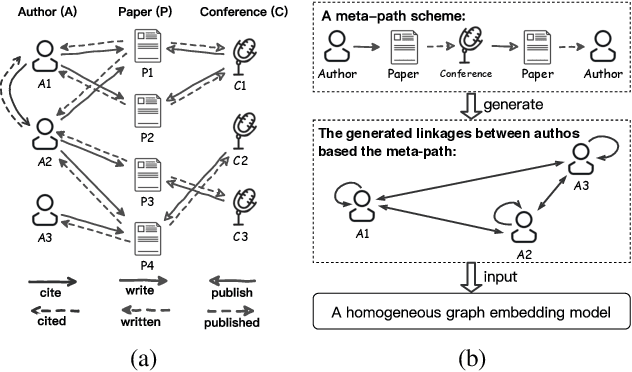
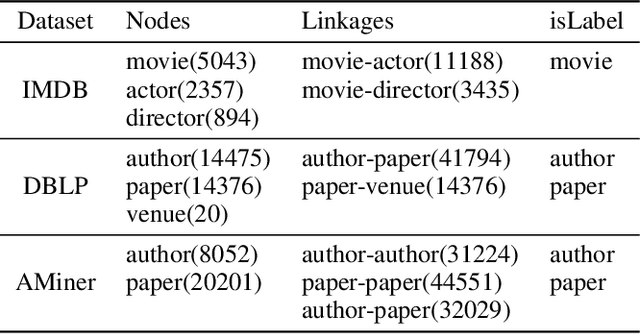
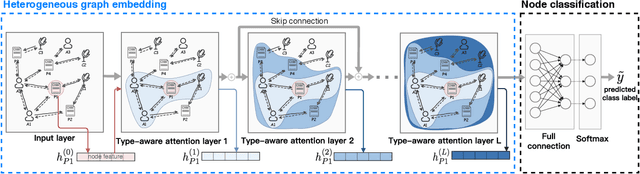
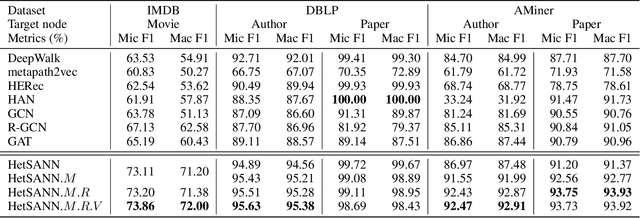
In this paper, we focus on graph representation learning of heterogeneous information network (HIN), in which various types of vertices are connected by various types of relations. Most of the existing methods conducted on HIN revise homogeneous graph embedding models via meta-paths to learn low-dimensional vector space of HIN. In this paper, we propose a novel Heterogeneous Graph Structural Attention Neural Network (HetSANN) to directly encode structural information of HIN without meta-path and achieve more informative representations. With this method, domain experts will not be needed to design meta-path schemes and the heterogeneous information can be processed automatically by our proposed model. Specifically, we implicitly represent heterogeneous information using the following two methods: 1) we model the transformation between heterogeneous vertices through a projection in low-dimensional entity spaces; 2) afterwards, we apply the graph neural network to aggregate multi-relational information of projected neighborhood by means of attention mechanism. We also present three extensions of HetSANN, i.e., voices-sharing product attention for the pairwise relationships in HIN, cycle-consistency loss to retain the transformation between heterogeneous entity spaces, and multi-task learning with full use of information. The experiments conducted on three public datasets demonstrate that our proposed models achieve significant and consistent improvements compared to state-of-the-art solutions.
Interpretable Text Classification Using CNN and Max-pooling
Oct 14, 2019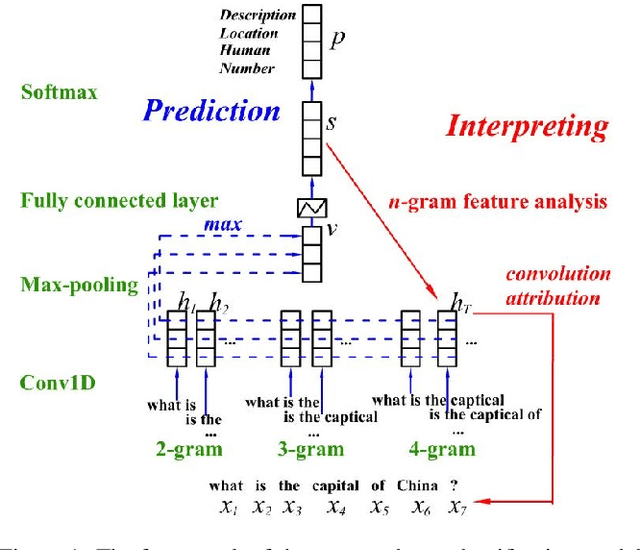
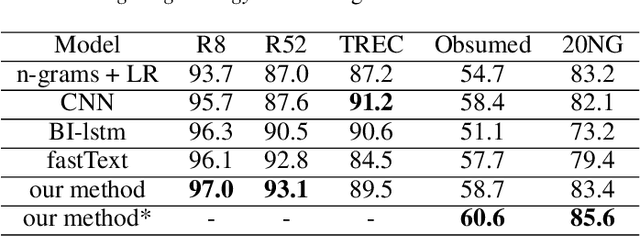
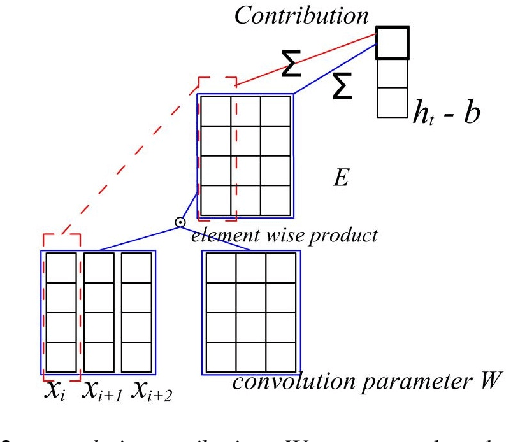
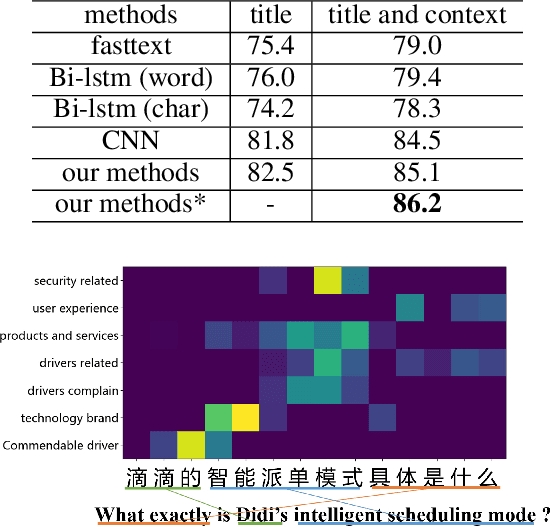
Deep neural networks have been widely used in text classification. However, it is hard to interpret the neural models due to the complicate mechanisms. In this work, we study the interpretability of a variant of the typical text classification model which is based on convolutional operation and max-pooling layer. Two mechanisms: convolution attribution and n-gram feature analysis are proposed to analyse the process procedure for the CNN model. The interpretability of the model is reflected by providing posterior interpretation for neural network predictions. Besides, a multi-sentence strategy is proposed to enable the model to beused in multi-sentence situation without loss of performance and interpret ability. We evaluate the performance of the model on several classification tasks and justify the interpretable performance with some case studies.
AHINE: Adaptive Heterogeneous Information Network Embedding
Aug 20, 2019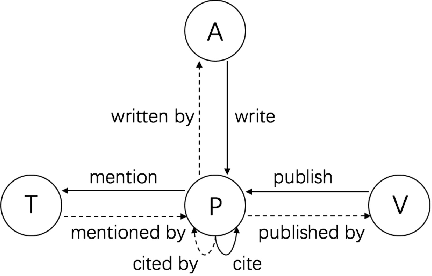
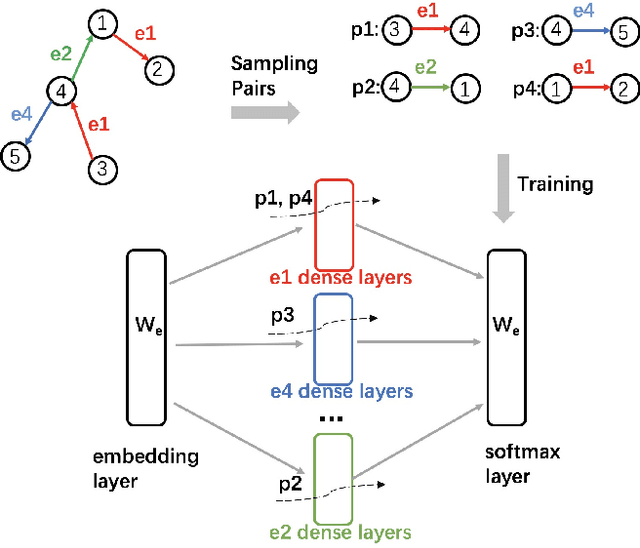
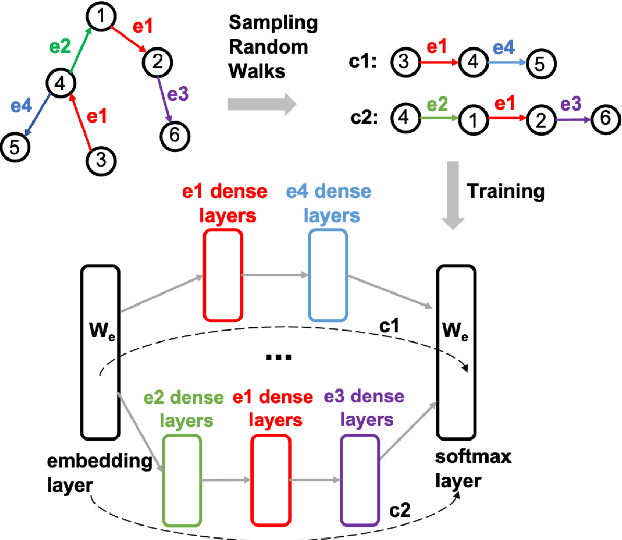
Network embedding is an effective way to solve the network analytics problems such as node classification, link prediction, etc. It represents network elements using low dimensional vectors such that the graph structural information and properties are maximumly preserved. Many prior works focused on embeddings for networks with the same type of edges or vertices, while some works tried to generate embeddings for heterogeneous network using mechanisms like specially designed meta paths. In this paper, we propose two novel algorithms, GHINE (General Heterogeneous Information Network Embedding) and AHINE (Adaptive Heterogeneous Information Network Embedding), to compute distributed representations for elements in heterogeneous networks. Specially, AHINE uses an adaptive deep model to learn network embeddings that maximizes the likelihood of preserving the relationship chains between non-adjacent nodes. We apply our embeddings to a large network of points of interest (POIs) and achieve superior accuracy on some prediction problems on a ride-hailing platform. In addition, we show that AHINE outperforms state-of-the-art methods on a set of learning tasks on public datasets, including node labelling and similarity ranking in bibliographic networks.