 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Word to Sentence: A Large-Scale Multi-Instance Dataset for Open-Set Aerial Detection
May 06, 2025In recent years, language-guided open-world aerial object detection has gained significant attention due to its better alignment with real-world application needs. However, due to limited datasets, most existing language-guided methods primarily focus on vocabulary, which fails to meet the demands of more fine-grained open-world detection. To address this limitation, we propose constructing a large-scale language-guided open-set aerial detection dataset, encompassing three levels of language guidance: from words to phrases, and ultimately to sentences. Centered around an open-source large vision-language model and integrating image-operation-based preprocessing with BERT-based postprocessing, we present the OS-W2S Label Engine, an automatic annotation pipeline capable of handling diverse scene annotations for aerial images. Using this label engine, we expand existing aerial detection datasets with rich textual annotations and construct a novel benchmark dataset, called Multi-instance Open-set Aerial Dataset (MI-OAD), addressing the limitations of current remote sensing grounding data and enabling effective open-set aerial detection. Specifically, MI-OAD contains 163,023 images and 2 million image-caption pairs, approximately 40 times larger than comparable datasets. We also employ state-of-the-art open-set methods from the natural image domain, trained on our proposed dataset, to validate the model's open-set detection capabilities. For instance, when trained on our dataset, Grounding DINO achieves improvements of 29.5 AP_{50} and 33.7 Recall@10 for sentence inputs under zero-shot transfer conditions. Both the dataset and the label engine will be released publicly.
Real-Time Animatable 2DGS-Avatars with Detail Enhancement from Monocular Videos
May 01, 2025High-quality, animatable 3D human avatar reconstruction from monocular videos offers significant potential for reducing reliance on complex hardware, making it highly practical for applications in game development, augmented reality, and social media. However, existing methods still face substantial challenges in capturing fine geometric details and maintaining animation stability, particularly under dynamic or complex poses. To address these issues, we propose a novel real-time framework for animatable human avatar reconstruction based on 2D Gaussian Splatting (2DGS). By leveraging 2DGS and global SMPL pose parameters, our framework not only aligns positional and rotational discrepancies but also enables robust and natural pose-driven animation of the reconstructed avatars. Furthermore, we introduce a Rotation Compensation Network (RCN) that learns rotation residuals by integrating local geometric features with global pose parameters. This network significantly improves the handling of non-rigid deformations and ensures smooth, artifact-free pose transitions during animation. Experimental results demonstrate that our method successfully reconstructs realistic and highly animatable human avatars from monocular videos, effectively preserving fine-grained details while ensuring stable and natural pose variation. Our approach surpasses current state-of-the-art methods in both reconstruction quality and animation robustness on public benchmarks.
OVA-DETR: Open Vocabulary Aerial Object Detection Using Image-Text Alignment and Fusion
Aug 22, 2024



Aerial object detection has been a hot topic for many years due to its wide application requirements. However, most existing approaches can only handle predefined categories, which limits their applicability for the open scenarios in real-world. In this paper, we extend aerial object detection to open scenarios by exploiting the relationship between image and text, and propose OVA-DETR, a high-efficiency open-vocabulary detector for aerial images. Specifically, based on the idea of image-text alignment, we propose region-text contrastive loss to replace the category regression loss in the traditional detection framework, which breaks the category limitation. Then, we propose Bidirectional Vision-Language Fusion (Bi-VLF), which includes a dual-attention fusion encoder and a multi-level text-guided Fusion Decoder. The dual-attention fusion encoder enhances the feature extraction process in the encoder part. The multi-level text-guided Fusion Decoder is designed to improve the detection ability for small objects, which frequently appear in aerial object detection scenarios. Experimental results on three widely used benchmark datasets show that our proposed method significantly improves the mAP and recall, while enjoying faster inference speed. For instance, in zero shot detection experiments on DIOR, the proposed OVA-DETR outperforms DescReg and YOLO-World by 37.4% and 33.1%, respectively, while achieving 87 FPS inference speed, which is 7.9x faster than DescReg and 3x faster than YOLO-world. The code is available at https://github.com/GT-Wei/OVA-DETR.
Deep Dictionary Learning with An Intra-class Constraint
Jul 14, 2022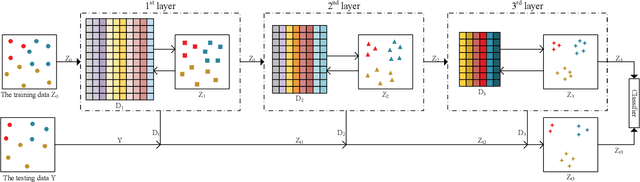
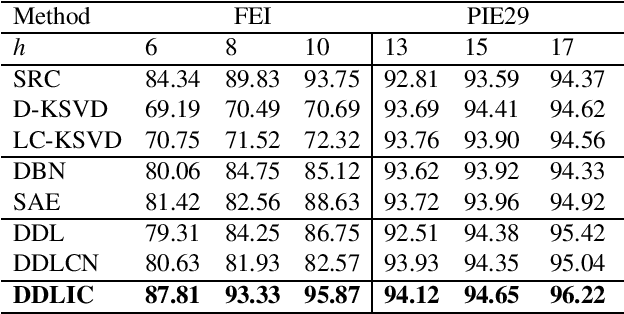
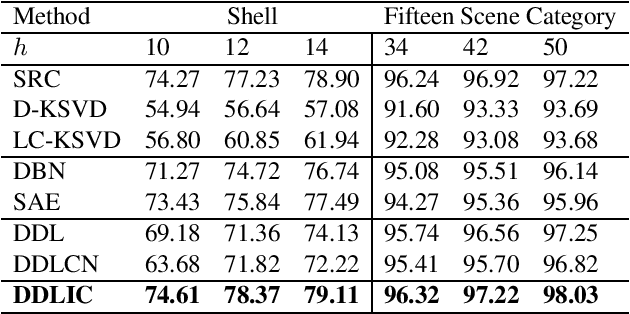
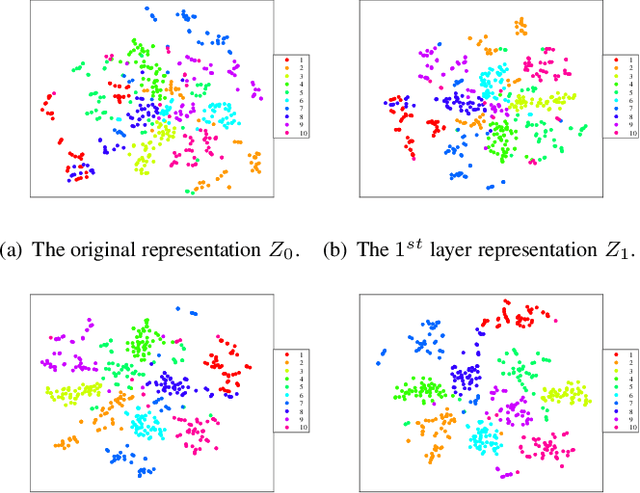
In recent years, deep dictionary learning (DDL)has attracted a great amount of attention due to its effectiveness for representation learning and visual recognition.~However, most existing methods focus on unsupervised deep dictionary learning, failing to further explore the category information.~To make full use of the category information of different samples, we propose a novel deep dictionary learning model with an intra-class constraint (DDLIC) for visual classification. Specifically, we design the intra-class compactness constraint on the intermediate representation at different levels to encourage the intra-class representations to be closer to each other, and eventually the learned representation becomes more discriminative.~Unlike the traditional DDL methods, during the classification stage, our DDLIC performs a layer-wise greedy optimization in a similar way to the training stage. Experimental results on four image datasets show that our method is superior to the state-of-the-art methods.
Real-time Keypoints Detection for Autonomous Recovery of the Unmanned Ground Vehicle
Jul 27, 2021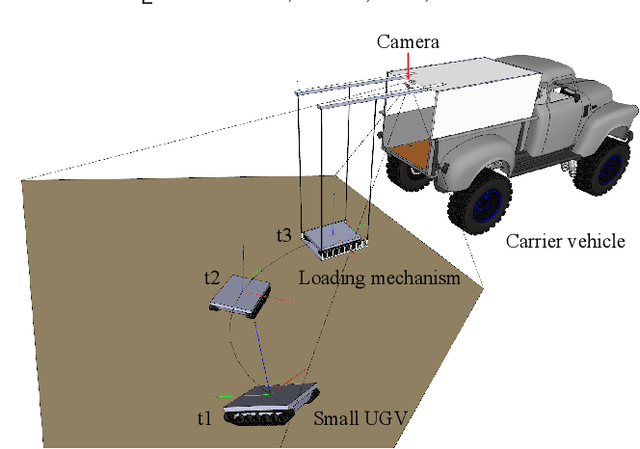

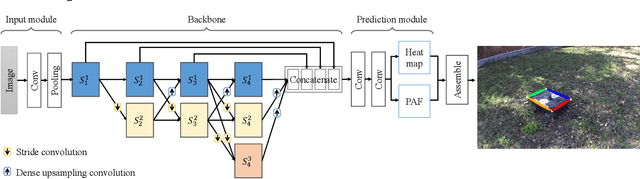

The combination of a small unmanned ground vehicle (UGV) and a large unmanned carrier vehicle allows more flexibility in real applications such as rescue in dangerous scenarios. The autonomous recovery system, which is used to guide the small UGV back to the carrier vehicle, is an essential component to achieve a seamless combination of the two vehicles. This paper proposes a novel autonomous recovery framework with a low-cost monocular vision system to provide accurate positioning and attitude estimation of the UGV during navigation. First, we introduce a light-weight convolutional neural network called UGV-KPNet to detect the keypoints of the small UGV from the images captured by a monocular camera. UGV-KPNet is computationally efficient with a small number of parameters and provides pixel-level accurate keypoints detection results in real-time. Then, six degrees of freedom pose is estimated using the detected keypoints to obtain positioning and attitude information of the UGV. Besides, we are the first to create a large-scale real-world keypoints dataset of the UGV. The experimental results demonstrate that the proposed system achieves state-of-the-art performance in terms of both accuracy and speed on UGV keypoint detection, and can further boost the 6-DoF pose estimation for the UGV.
Anisotropic Convolutional Networks for 3D Semantic Scene Completion
Apr 05, 2020
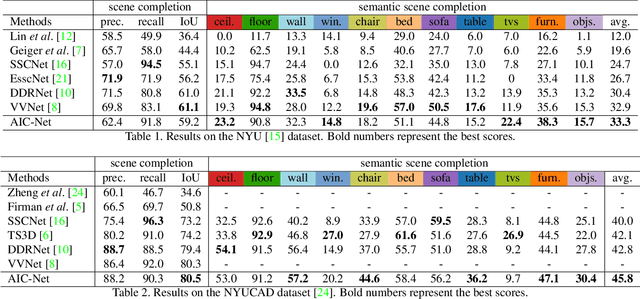
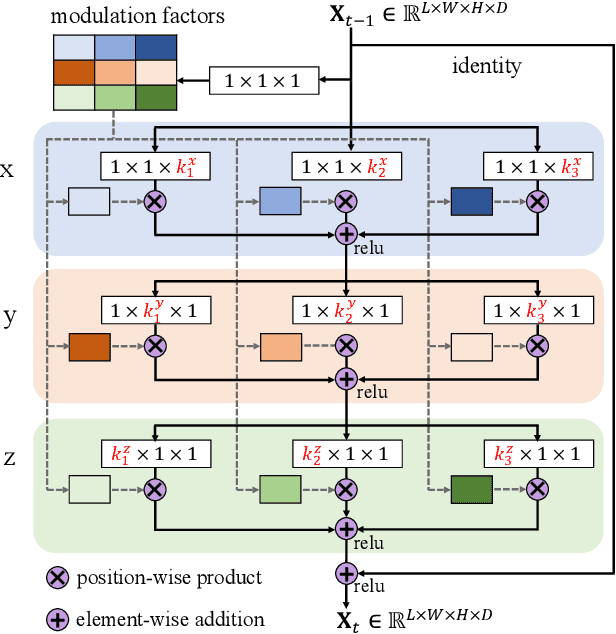

As a voxel-wise labeling task, semantic scene completion (SSC) tries to simultaneously infer the occupancy and semantic labels for a scene from a single depth and/or RGB image. The key challenge for SSC is how to effectively take advantage of the 3D context to model various objects or stuffs with severe variations in shapes, layouts and visibility. To handle such variations, we propose a novel module called anisotropic convolution, which properties with flexibility and power impossible for the competing methods such as standard 3D convolution and some of its variations. In contrast to the standard 3D convolution that is limited to a fixed 3D receptive field, our module is capable of modeling the dimensional anisotropy voxel-wisely. The basic idea is to enable anisotropic 3D receptive field by decomposing a 3D convolution into three consecutive 1D convolutions, and the kernel size for each such 1D convolution is adaptively determined on the fly. By stacking multiple such anisotropic convolution modules, the voxel-wise modeling capability can be further enhanced while maintaining a controllable amount of model parameters. Extensive experiments on two SSC benchmarks, NYU-Depth-v2 and NYUCAD, show the superior performance of the proposed method. Our code is available at https://waterljwant.github.io/SSC/
3D Gated Recurrent Fusion for Semantic Scene Completion
Feb 17, 2020
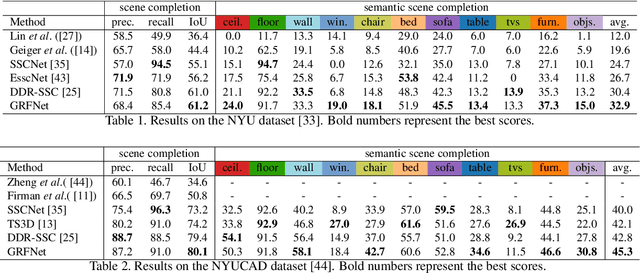


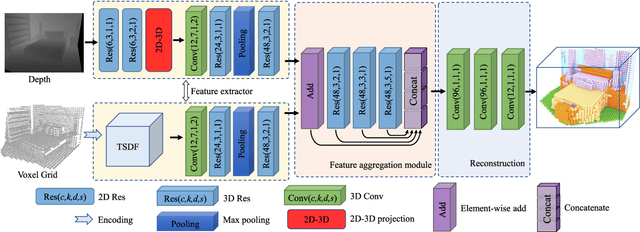
This paper tackles the problem of data fusion in the semantic scene completion (SSC) task, which can simultaneously deal with semantic labeling and scene completion. RGB images contain texture details of the object(s) which are vital for semantic scene understanding. Meanwhile, depth images capture geometric clues of high relevance for shape completion. Using both RGB and depth images can further boost the accuracy of SSC over employing one modality in isolation. We propose a 3D gated recurrent fusion network (GRFNet), which learns to adaptively select and fuse the relevant information from depth and RGB by making use of the gate and memory modules. Based on the single-stage fusion, we further propose a multi-stage fusion strategy, which could model the correlations among different stages within the network. Extensive experiments on two benchmark datasets demonstrate the superior performance and the effectiveness of the proposed GRFNet for data fusion in SSC. Code will be made available.
Depth Based Semantic Scene Completion with Position Importance Aware Loss
Jan 30, 2020
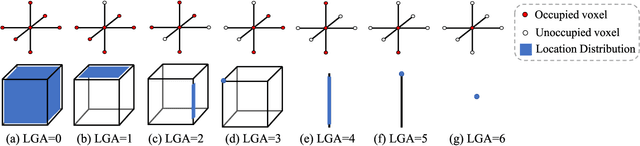
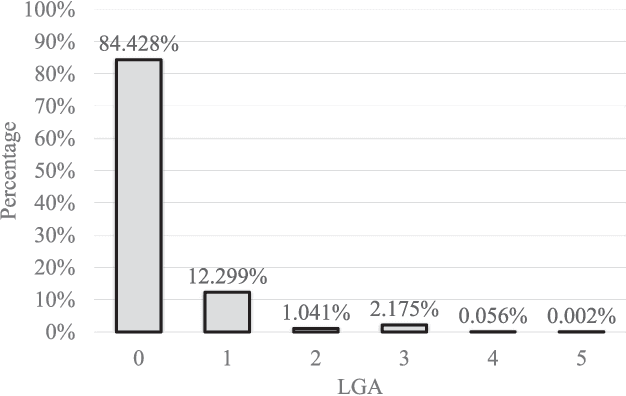
Semantic Scene Completion (SSC) refers to the task of inferring the 3D semantic segmentation of a scene while simultaneously completing the 3D shapes. We propose PALNet, a novel hybrid network for SSC based on single depth. PALNet utilizes a two-stream network to extract both 2D and 3D features from multi-stages using fine-grained depth information to efficiently captures the context, as well as the geometric cues of the scene. Current methods for SSC treat all parts of the scene equally causing unnecessary attention to the interior of objects. To address this problem, we propose Position Aware Loss(PA-Loss) which is position importance aware while training the network. Specifically, PA-Loss considers Local Geometric Anisotropy to determine the importance of different positions within the scene. It is beneficial for recovering key details like the boundaries of objects and the corners of the scene. Comprehensive experiments on two benchmark datasets demonstrate the effectiveness of the proposed method and its superior performance. Models and Video demo can be found at: https://github.com/UniLauX/PALNet.
RGBD Based Dimensional Decomposition Residual Network for 3D Semantic Scene Completion
Mar 02, 2019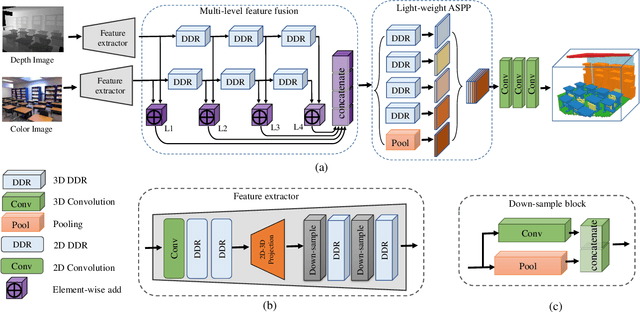

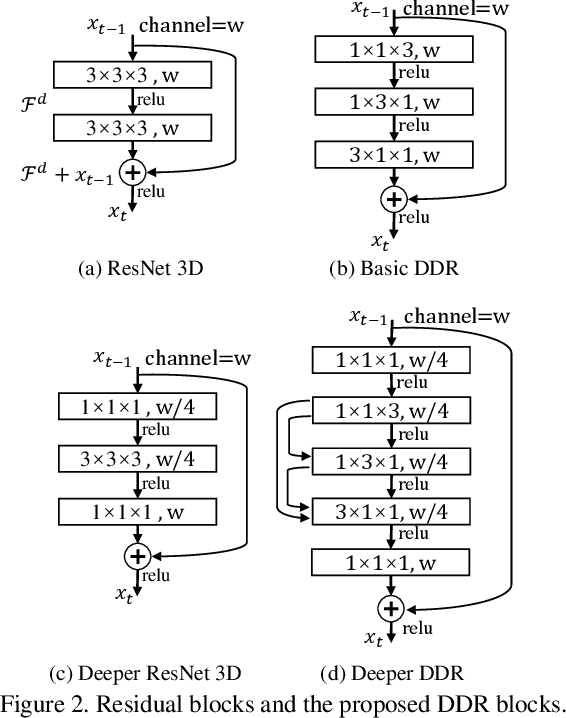

RGB images differentiate from depth images as they carry more details about the color and texture information, which can be utilized as a vital complementary to depth for boosting the performance of 3D semantic scene completion (SSC). SSC is composed of 3D shape completion (SC) and semantic scene labeling while most of the existing methods use depth as the sole input which causes the performance bottleneck. Moreover, the state-of-the-art methods employ 3D CNNs which have cumbersome networks and tremendous parameters. We introduce a light-weight Dimensional Decomposition Residual network (DDR) for 3D dense prediction tasks. The novel factorized convolution layer is effective for reducing the network parameters, and the proposed multi-scale fusion mechanism for depth and color image can improve the completion and segmentation accuracy simultaneously. Our method demonstrates excellent performance on two public datasets. Compared with the latest method SSCNet, we achieve 5.9% gains in SC-IoU and 5.7% gains in SSC-IOU, albeit with only 21% network parameters and 16.6% FLOPs employed compared with that of SSCNet.
Extracting PICO elements from RCT abstracts using 1-2gram analysis and multitask classification
Jan 24, 2019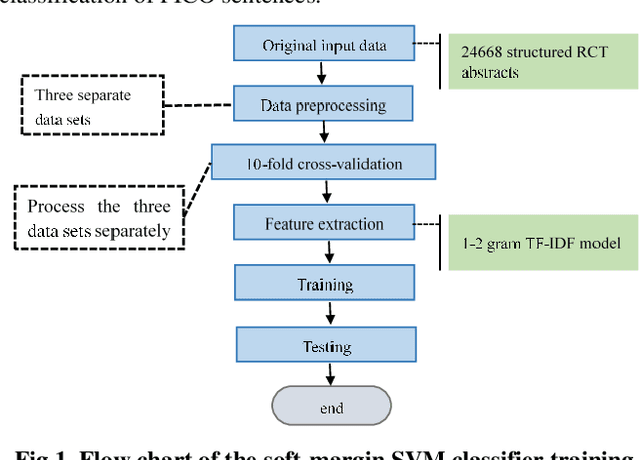
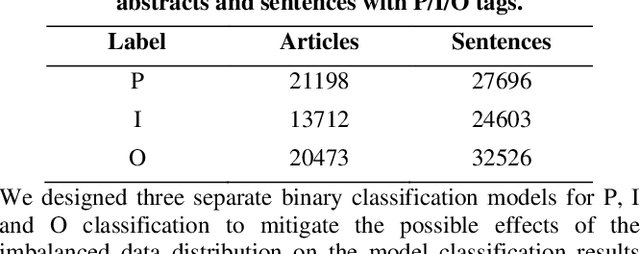

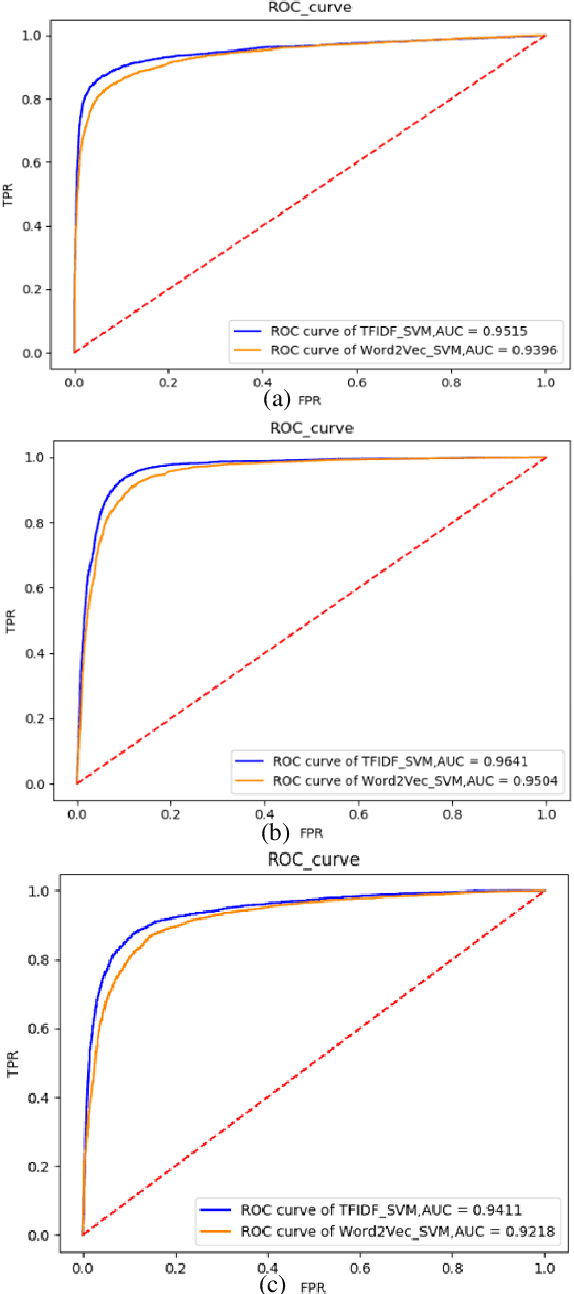
The core of evidence-based medicine is to read and analyze numerous papers in the medical literature on a specific clinical problem and summarize the authoritative answers to that problem. Currently, to formulate a clear and focused clinical problem, the popular PICO framework is usually adopted, in which each clinical problem is considered to consist of four parts: patient/problem (P), intervention (I), comparison (C) and outcome (O). In this study, we compared several classification models that are commonly used in traditional machine learning. Next, we developed a multitask classification model based on a soft-margin SVM with a specialized feature engineering method that combines 1-2gram analysis with TF-IDF analysis. Finally, we trained and tested several generic models on an open-source data set from BioNLP 2018. The results show that the proposed multitask SVM classification model based on 1-2gram TF-IDF features exhibits the best performance among the tested models.