 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepth Based Semantic Scene Completion with Position Importance Aware Loss
Paper and Code

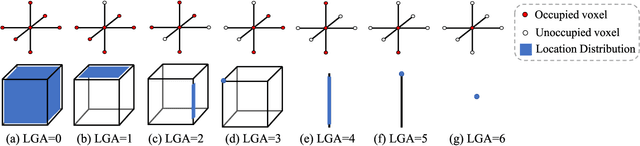
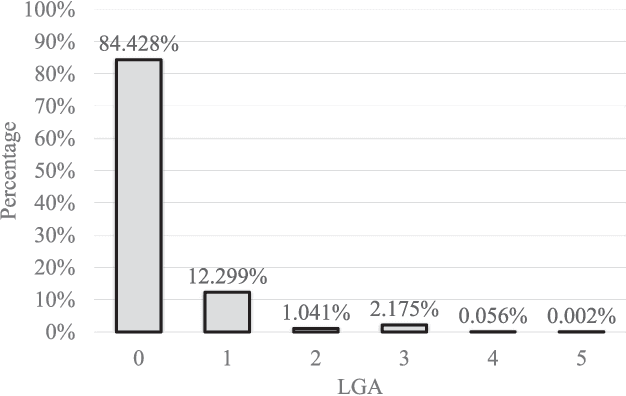
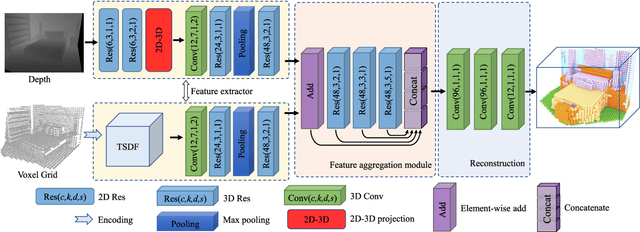
Semantic Scene Completion (SSC) refers to the task of inferring the 3D semantic segmentation of a scene while simultaneously completing the 3D shapes. We propose PALNet, a novel hybrid network for SSC based on single depth. PALNet utilizes a two-stream network to extract both 2D and 3D features from multi-stages using fine-grained depth information to efficiently captures the context, as well as the geometric cues of the scene. Current methods for SSC treat all parts of the scene equally causing unnecessary attention to the interior of objects. To address this problem, we propose Position Aware Loss(PA-Loss) which is position importance aware while training the network. Specifically, PA-Loss considers Local Geometric Anisotropy to determine the importance of different positions within the scene. It is beneficial for recovering key details like the boundaries of objects and the corners of the scene. Comprehensive experiments on two benchmark datasets demonstrate the effectiveness of the proposed method and its superior performance. Models and Video demo can be found at: https://github.com/UniLauX/PALNet.