 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNVIDIA Nemotron 3: Efficient and Open Intelligence
Dec 24, 2025We introduce the Nemotron 3 family of models - Nano, Super, and Ultra. These models deliver strong agentic, reasoning, and conversational capabilities. The Nemotron 3 family uses a Mixture-of-Experts hybrid Mamba-Transformer architecture to provide best-in-class throughput and context lengths of up to 1M tokens. Super and Ultra models are trained with NVFP4 and incorporate LatentMoE, a novel approach that improves model quality. The two larger models also include MTP layers for faster text generation. All Nemotron 3 models are post-trained using multi-environment reinforcement learning enabling reasoning, multi-step tool use, and support granular reasoning budget control. Nano, the smallest model, outperforms comparable models in accuracy while remaining extremely cost-efficient for inference. Super is optimized for collaborative agents and high-volume workloads such as IT ticket automation. Ultra, the largest model, provides state-of-the-art accuracy and reasoning performance. Nano is released together with its technical report and this white paper, while Super and Ultra will follow in the coming months. We will openly release the model weights, pre- and post-training software, recipes, and all data for which we hold redistribution rights.
Nemotron 3 Nano: Open, Efficient Mixture-of-Experts Hybrid Mamba-Transformer Model for Agentic Reasoning
Dec 23, 2025We present Nemotron 3 Nano 30B-A3B, a Mixture-of-Experts hybrid Mamba-Transformer language model. Nemotron 3 Nano was pretrained on 25 trillion text tokens, including more than 3 trillion new unique tokens over Nemotron 2, followed by supervised fine tuning and large-scale RL on diverse environments. Nemotron 3 Nano achieves better accuracy than our previous generation Nemotron 2 Nano while activating less than half of the parameters per forward pass. It achieves up to 3.3x higher inference throughput than similarly-sized open models like GPT-OSS-20B and Qwen3-30B-A3B-Thinking-2507, while also being more accurate on popular benchmarks. Nemotron 3 Nano demonstrates enhanced agentic, reasoning, and chat abilities and supports context lengths up to 1M tokens. We release both our pretrained Nemotron 3 Nano 30B-A3B Base and post-trained Nemotron 3 Nano 30B-A3B checkpoints on Hugging Face.
LLM Inference Beyond a Single Node: From Bottlenecks to Mitigations with Fast All-Reduce Communication
Nov 13, 2025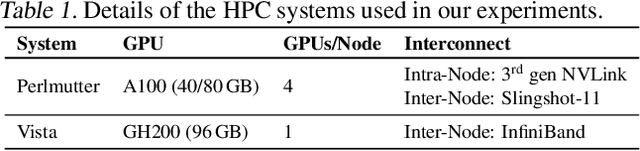
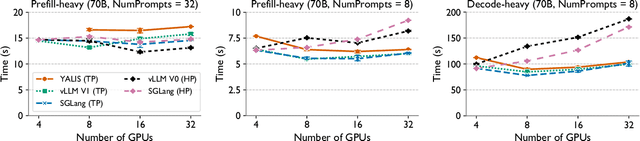

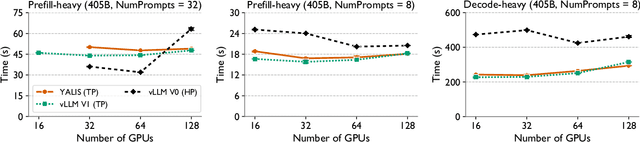
As large language models (LLMs) continue to grow in size, distributed inference has become increasingly important. Model-parallel strategies must now efficiently scale not only across multiple GPUs but also across multiple nodes. In this work, we present a detailed performance study of multi-node distributed inference using LLMs on GPU-based supercomputers. We conduct experiments with several state-of-the-art inference engines alongside YALIS, a research-oriented prototype engine designed for controlled experimentation. We analyze the strong-scaling behavior of different model-parallel schemes and identify key bottlenecks. Since all-reduce operations are a common performance bottleneck, we develop NVRAR, a hierarchical all-reduce algorithm based on recursive doubling with NVSHMEM. NVRAR achieves up to 1.9x-3.6x lower latency than NCCL for message sizes between 128 KB and 2 MB on HPE Slingshot and InfiniBand interconnects. Integrated into YALIS, NVRAR achieves up to a 1.72x reduction in end-to-end batch latency for the Llama 3.1 405B model in multi-node decode-heavy workloads using tensor parallelism.
NVIDIA Nemotron Nano 2: An Accurate and Efficient Hybrid Mamba-Transformer Reasoning Model
Aug 21, 2025



We introduce Nemotron-Nano-9B-v2, a hybrid Mamba-Transformer language model designed to increase throughput for reasoning workloads while achieving state-of-the-art accuracy compared to similarly-sized models. Nemotron-Nano-9B-v2 builds on the Nemotron-H architecture, in which the majority of the self-attention layers in the common Transformer architecture are replaced with Mamba-2 layers, to achieve improved inference speed when generating the long thinking traces needed for reasoning. We create Nemotron-Nano-9B-v2 by first pre-training a 12-billion-parameter model (Nemotron-Nano-12B-v2-Base) on 20 trillion tokens using an FP8 training recipe. After aligning Nemotron-Nano-12B-v2-Base, we employ the Minitron strategy to compress and distill the model with the goal of enabling inference on up to 128k tokens on a single NVIDIA A10G GPU (22GiB of memory, bfloat16 precision). Compared to existing similarly-sized models (e.g., Qwen3-8B), we show that Nemotron-Nano-9B-v2 achieves on-par or better accuracy on reasoning benchmarks while achieving up to 6x higher inference throughput in reasoning settings like 8k input and 16k output tokens. We are releasing Nemotron-Nano-9B-v2, Nemotron-Nano12B-v2-Base, and Nemotron-Nano-9B-v2-Base checkpoints along with the majority of our pre- and post-training datasets on Hugging Face.
Plexus: Taming Billion-edge Graphs with 3D Parallel GNN Training
May 07, 2025Graph neural networks have emerged as a potent class of neural networks capable of leveraging the connectivity and structure of real-world graphs to learn intricate properties and relationships between nodes. Many real-world graphs exceed the memory capacity of a GPU due to their sheer size, and using GNNs on them requires techniques such as mini-batch sampling to scale. However, this can lead to reduced accuracy in some cases, and sampling and data transfer from the CPU to the GPU can also slow down training. On the other hand, distributed full-graph training suffers from high communication overhead and load imbalance due to the irregular structure of graphs. We propose Plexus, a three-dimensional (3D) parallel approach for full-graph training that tackles these issues and scales to billion-edge graphs. Additionally, we introduce optimizations such as a permutation scheme for load balancing, and a performance model to predict the optimal 3D configuration. We evaluate Plexus on several graph datasets and show scaling results for up to 2048 GPUs on Perlmutter, which is 33% of the machine, and 2048 GCDs on Frontier. Plexus achieves unprecedented speedups of 2.3x-12.5x over existing methods and a reduction in the time to solution by 5.2-8.7x on Perlmutter and 7-54.2x on Frontier.
The Big Send-off: High Performance Collectives on GPU-based Supercomputers
Apr 25, 2025We evaluate the current state of collective communication on GPU-based supercomputers for large language model (LLM) training at scale. Existing libraries such as RCCL and Cray-MPICH exhibit critical limitations on systems such as Frontier -- Cray-MPICH underutilizes network and compute resources, while RCCL suffers from severe scalability issues. To address these challenges, we introduce PCCL, a communication library with highly optimized implementations of all-gather and reduce-scatter operations tailored for distributed deep learning workloads. PCCL is designed to maximally utilize all available network and compute resources and to scale efficiently to thousands of GPUs. It achieves substantial performance improvements, delivering 6-33x speedups over RCCL and 28-70x over Cray-MPICH for all-gather on 2048 GCDs of Frontier. These gains translate directly to end-to-end performance: in large-scale GPT-3-style training, PCCL provides up to 60% and 40% speedups over RCCL for 7B and 13B parameter models, respectively.
Hybrid Robot Learning for Automatic Robot Motion Planning in Manufacturing
Feb 26, 2025Industrial robots are widely used in diverse manufacturing environments. Nonetheless, how to enable robots to automatically plan trajectories for changing tasks presents a considerable challenge. Further complexities arise when robots operate within work cells alongside machines, humans, or other robots. This paper introduces a multi-level hybrid robot motion planning method combining a task space Reinforcement Learning-based Learning from Demonstration (RL-LfD) agent and a joint-space based Deep Reinforcement Learning (DRL) based agent. A higher level agent learns to switch between the two agents to enable feasible and smooth motion. The feasibility is computed by incorporating reachability, joint limits, manipulability, and collision risks of the robot in the given environment. Therefore, the derived hybrid motion planning policy generates a feasible trajectory that adheres to task constraints. The effectiveness of the method is validated through sim ulated robotic scenarios and in a real-world setup.
Democratizing AI: Open-source Scalable LLM Training on GPU-based Supercomputers
Feb 12, 2025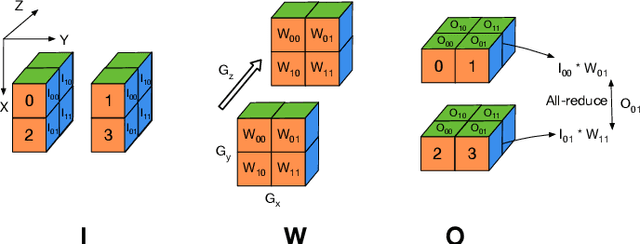
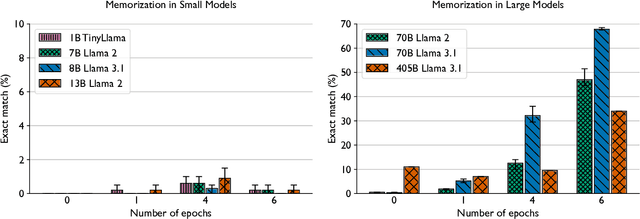
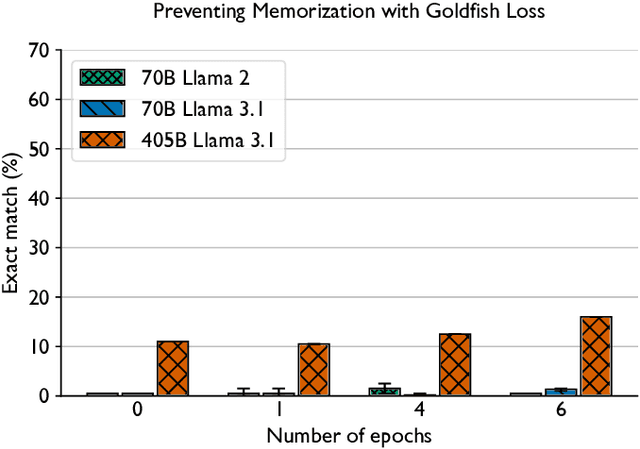
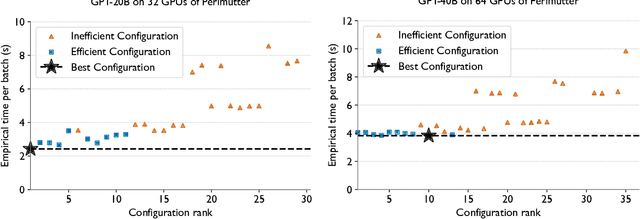
Training and fine-tuning large language models (LLMs) with hundreds of billions to trillions of parameters requires tens of thousands of GPUs, and a highly scalable software stack. In this work, we present a novel four-dimensional hybrid parallel algorithm implemented in a highly scalable, portable, open-source framework called AxoNN. We describe several performance optimizations in AxoNN to improve matrix multiply kernel performance, overlap non-blocking collectives with computation, and performance modeling to choose performance optimal configurations. These have resulted in unprecedented scaling and peak flop/s (bf16) for training of GPT-style transformer models on Perlmutter (620.1 Petaflop/s), Frontier (1.381 Exaflop/s) and Alps (1.423 Exaflop/s). While the abilities of LLMs improve with the number of trainable parameters, so do privacy and copyright risks caused by memorization of training data, which can cause disclosure of sensitive or private information at inference time. We highlight this side effect of scale through experiments that explore "catastrophic memorization", where models are sufficiently large to memorize training data in a single pass, and present an approach to prevent it. As part of this study, we demonstrate fine-tuning of a 405-billion parameter LLM using AxoNN on Frontier.
Scaling up Test-Time Compute with Latent Reasoning: A Recurrent Depth Approach
Feb 07, 2025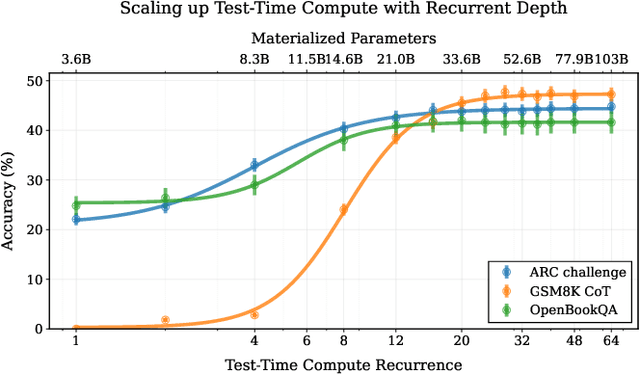
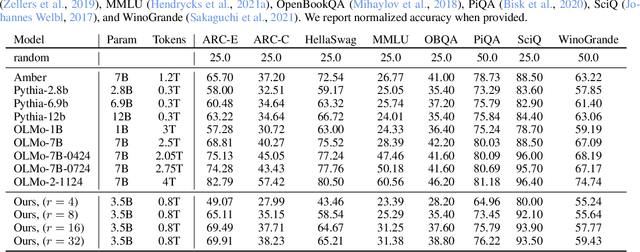
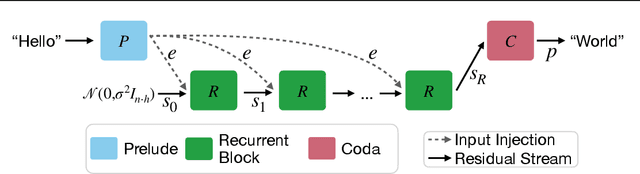
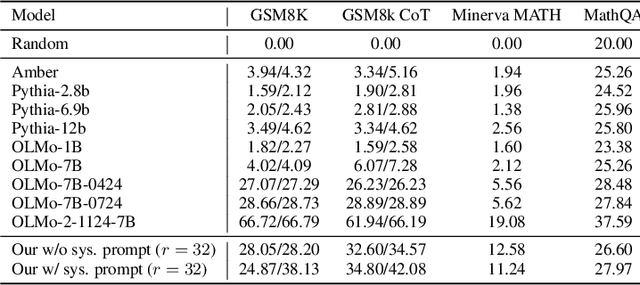
We study a novel language model architecture that is capable of scaling test-time computation by implicitly reasoning in latent space. Our model works by iterating a recurrent block, thereby unrolling to arbitrary depth at test-time. This stands in contrast to mainstream reasoning models that scale up compute by producing more tokens. Unlike approaches based on chain-of-thought, our approach does not require any specialized training data, can work with small context windows, and can capture types of reasoning that are not easily represented in words. We scale a proof-of-concept model to 3.5 billion parameters and 800 billion tokens. We show that the resulting model can improve its performance on reasoning benchmarks, sometimes dramatically, up to a computation load equivalent to 50 billion parameters.
Gemstones: A Model Suite for Multi-Faceted Scaling Laws
Feb 07, 2025



Scaling laws are typically fit using a family of models with a narrow range of frozen hyper-parameter choices. In this work we study scaling laws using a wide range of architecture and hyper-parameter choices, and highlight their impact on resulting prescriptions. As a primary artifact of our research, we release the Gemstones: the most comprehensive open-source scaling law dataset to date, consisting of over 4000 checkpoints from transformers with up to 2 billion parameters; these models have been trained with different learning rates, cooldown schedules, and architectural shapes. Our checkpoints enable more complex studies of scaling, such as a law that predicts language modeling performance as a function of model width and depth. By examining the various facets of our model suite, we find that the prescriptions of scaling laws can be highly sensitive to the experimental design process and the specific model checkpoints used during fitting. Code: https://github.com/mcleish7/gemstone-scaling-laws