 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Intuition to Understanding: Using AI Peers to Overcome Physics Misconceptions
Apr 01, 2025Generative AI has the potential to transform personalization and accessibility of education. However, it raises serious concerns about accuracy and helping students become independent critical thinkers. In this study, we designed a helpful AI "Peer" to help students correct fundamental physics misconceptions related to Newtonian mechanic concepts. In contrast to approaches that seek near-perfect accuracy to create an authoritative AI tutor or teacher, we directly inform students that this AI can answer up to 40% of questions incorrectly. In a randomized controlled trial with 165 students, those who engaged in targeted dialogue with the AI Peer achieved post-test scores that were, on average, 10.5 percentage points higher - with over 20 percentage points higher normalized gain - than a control group that discussed physics history. Qualitative feedback indicated that 91% of the treatment group's AI interactions were rated as helpful. Furthermore, by comparing student performance on pre- and post-test questions about the same concept, along with experts' annotations of the AI interactions, we find initial evidence suggesting the improvement in performance does not depend on the correctness of the AI. With further research, the AI Peer paradigm described here could open new possibilities for how we learn, adapt to, and grow with AI.
Primitive-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitives
Feb 24, 2025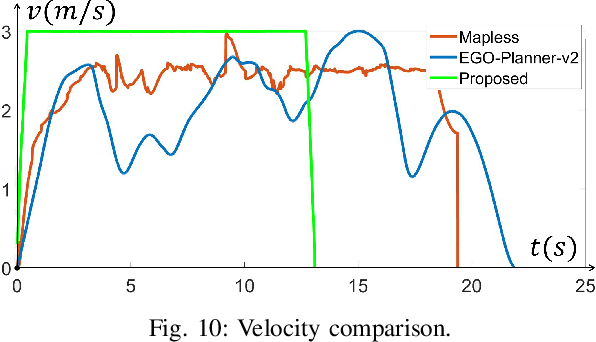
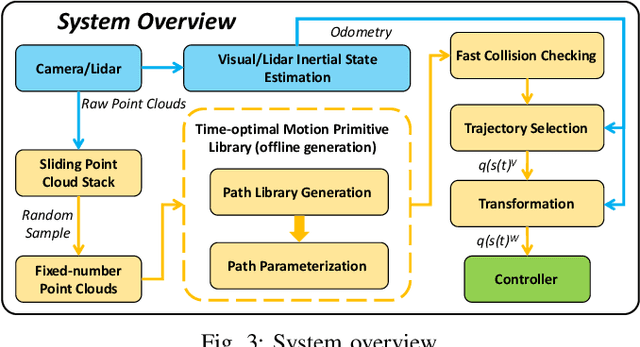
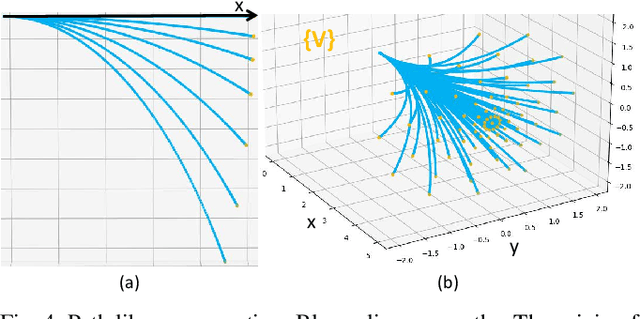
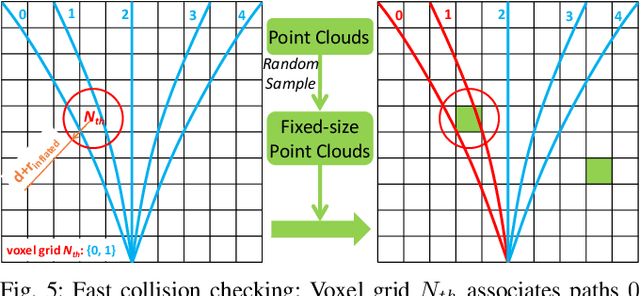
It is a significant requirement for a quadrotor trajectory planner to simultaneously guarantee trajectory quality and system lightweight. Many researchers focus on this problem, but there's still a gap between their performance and our common wish. In this paper, we propose an ultra lightweight quadrotor planner with time-optimal primitives. Firstly, a novel motion primitive library is proposed to generate time-optimal and dynamical feasible trajectories offline. Secondly, we propose a fast collision checking method with a deterministic time consumption, independent of the sampling resolution of the primitives. Finally, we select the minimum cost trajectory to execute among the safe primitives based on user-defined requirements. The propsed transformation relation between the local trajectories ensures the smoothness of the global trajectory. The planner reduces unnecessary online computing power consumption as much as possible, while ensuring a high-quality trajectory. Benchmark comparisons show that our method can generate the shortest flight time and distance of trajectory with the lowest computation overload. Challenging real-world experiments validate the robustness of our method.
Primitive-Swarm: An Ultra-lightweight and Scalable Planner for Large-scale Aerial Swarms
Feb 24, 2025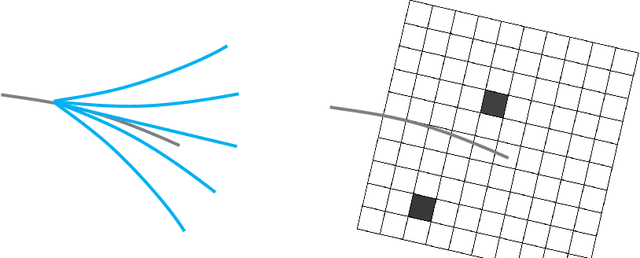
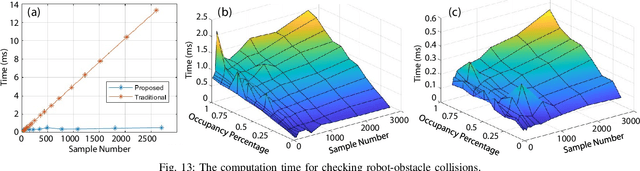
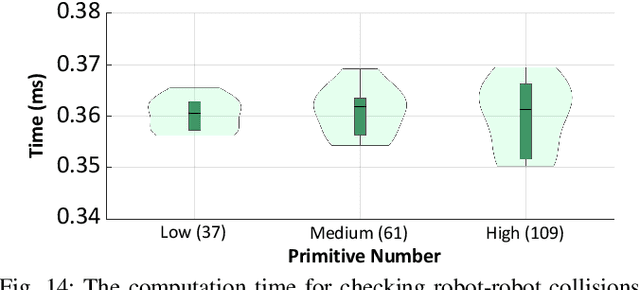
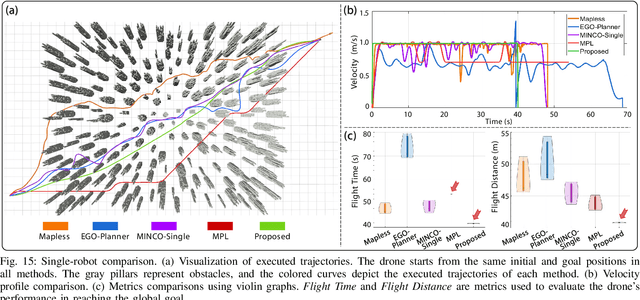
Achieving large-scale aerial swarms is challenging due to the inherent contradictions in balancing computational efficiency and scalability. This paper introduces Primitive-Swarm, an ultra-lightweight and scalable planner designed specifically for large-scale autonomous aerial swarms. The proposed approach adopts a decentralized and asynchronous replanning strategy. Within it is a novel motion primitive library consisting of time-optimal and dynamically feasible trajectories. They are generated utlizing a novel time-optimial path parameterization algorithm based on reachability analysis (TOPP-RA). Then, a rapid collision checking mechanism is developed by associating the motion primitives with the discrete surrounding space according to conflicts. By considering both spatial and temporal conflicts, the mechanism handles robot-obstacle and robot-robot collisions simultaneously. Then, during a replanning process, each robot selects the safe and minimum cost trajectory from the library based on user-defined requirements. Both the time-optimal motion primitive library and the occupancy information are computed offline, turning a time-consuming optimization problem into a linear-complexity selection problem. This enables the planner to comprehensively explore the non-convex, discontinuous 3-D safe space filled with numerous obstacles and robots, effectively identifying the best hidden path. Benchmark comparisons demonstrate that our method achieves the shortest flight time and traveled distance with a computation time of less than 1 ms in dense environments. Super large-scale swarm simulations, involving up to 1000 robots, running in real-time, verify the scalability of our method. Real-world experiments validate the feasibility and robustness of our approach. The code will be released to foster community collaboration.
A Guide to Misinformation Detection Datasets
Nov 07, 2024



Misinformation is a complex societal issue, and mitigating solutions are difficult to create due to data deficiencies. To address this problem, we have curated the largest collection of (mis)information datasets in the literature, totaling 75. From these, we evaluated the quality of all of the 36 datasets that consist of statements or claims. We assess these datasets to identify those with solid foundations for empirical work and those with flaws that could result in misleading and non-generalizable results, such as insufficient label quality, spurious correlations, or political bias. We further provide state-of-the-art baselines on all these datasets, but show that regardless of label quality, categorical labels may no longer give an accurate evaluation of detection model performance. We discuss alternatives to mitigate this problem. Overall, this guide aims to provide a roadmap for obtaining higher quality data and conducting more effective evaluations, ultimately improving research in misinformation detection. All datasets and other artifacts are available at https://misinfo-datasets.complexdatalab.com/.
Lie Theory Based Optimization for Unified State Planning of Mobile Manipulators
Oct 20, 2024



Mobile manipulators are finding use in numerous practical applications. The current issues with mobile manipulation are the large state space owing to the mobile base and the challenge of modeling high degree of freedom systems. It is critical to devise fast and accurate algorithms that generate smooth motion plans for such mobile manipulators. Existing techniques attempt to solve this problem but focus on separating the motion of the base and manipulator. We propose an approach using Lie theory to find the inverse kinematic constraints by converting the kinematic model, created using screw coordinates, between its Lie group and vector representation. An optimization function is devised to solve for the desired joint states of the entire mobile manipulator. This allows the motion of the mobile base and manipulator to be planned and applied in unison resulting in a smooth and accurate motion plan. The performance of the proposed state planner is validated on simulated mobile manipulators in an analytical experiment. Our solver is available with further derivations and results at https://github.com/peleito/slithers.
FlowMap: Path Generation for Automated Vehicles in Open Space Using Traffic Flow
May 11, 2023



There is extensive literature on perceiving road structures by fusing various sensor inputs such as lidar point clouds and camera images using deep neural nets. Leveraging the latest advance of neural architects (such as transformers) and bird-eye-view (BEV) representation, the road cognition accuracy keeps improving. However, how to cognize the ``road'' for automated vehicles where there is no well-defined ``roads'' remains an open problem. For example, how to find paths inside intersections without HD maps is hard since there is neither an explicit definition for ``roads'' nor explicit features such as lane markings. The idea of this paper comes from a proverb: it becomes a way when people walk on it. Although there are no ``roads'' from sensor readings, there are ``roads'' from tracks of other vehicles. In this paper, we propose FlowMap, a path generation framework for automated vehicles based on traffic flows. FlowMap is built by extending our previous work RoadMap, a light-weight semantic map, with an additional traffic flow layer. A path generation algorithm on traffic flow fields (TFFs) is proposed to generate human-like paths. The proposed framework is validated using real-world driving data and is amenable to generating paths for super complicated intersections without using HD maps.