 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrimitive-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitives
Feb 24, 2025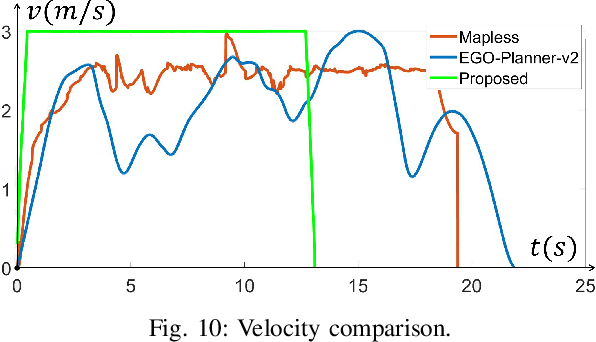
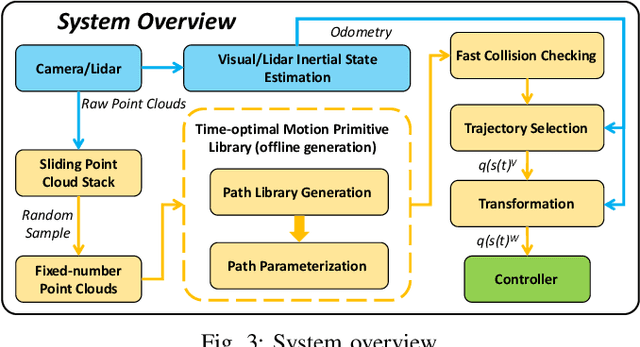
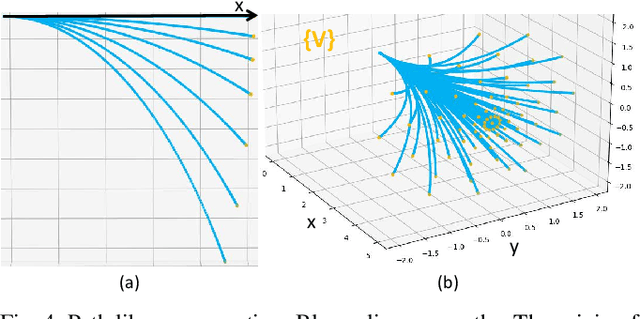
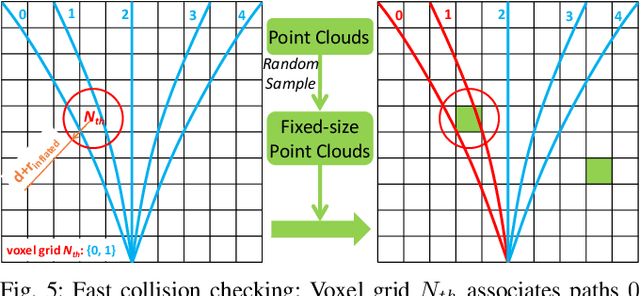
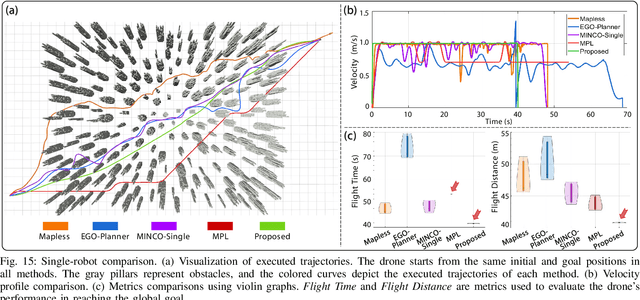
It is a significant requirement for a quadrotor trajectory planner to simultaneously guarantee trajectory quality and system lightweight. Many researchers focus on this problem, but there's still a gap between their performance and our common wish. In this paper, we propose an ultra lightweight quadrotor planner with time-optimal primitives. Firstly, a novel motion primitive library is proposed to generate time-optimal and dynamical feasible trajectories offline. Secondly, we propose a fast collision checking method with a deterministic time consumption, independent of the sampling resolution of the primitives. Finally, we select the minimum cost trajectory to execute among the safe primitives based on user-defined requirements. The propsed transformation relation between the local trajectories ensures the smoothness of the global trajectory. The planner reduces unnecessary online computing power consumption as much as possible, while ensuring a high-quality trajectory. Benchmark comparisons show that our method can generate the shortest flight time and distance of trajectory with the lowest computation overload. Challenging real-world experiments validate the robustness of our method.
Primitive-Swarm: An Ultra-lightweight and Scalable Planner for Large-scale Aerial Swarms
Feb 24, 2025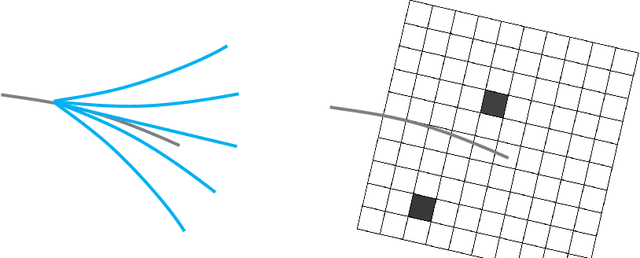
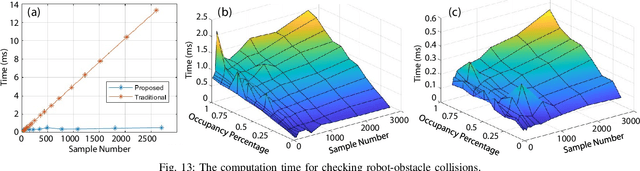
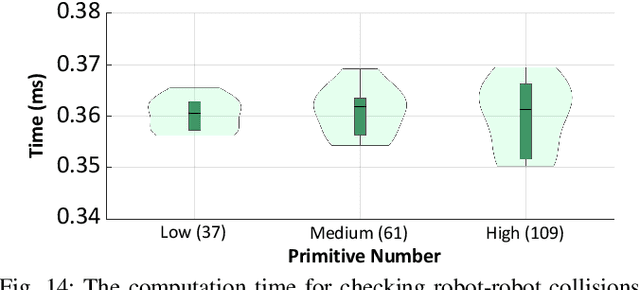
Achieving large-scale aerial swarms is challenging due to the inherent contradictions in balancing computational efficiency and scalability. This paper introduces Primitive-Swarm, an ultra-lightweight and scalable planner designed specifically for large-scale autonomous aerial swarms. The proposed approach adopts a decentralized and asynchronous replanning strategy. Within it is a novel motion primitive library consisting of time-optimal and dynamically feasible trajectories. They are generated utlizing a novel time-optimial path parameterization algorithm based on reachability analysis (TOPP-RA). Then, a rapid collision checking mechanism is developed by associating the motion primitives with the discrete surrounding space according to conflicts. By considering both spatial and temporal conflicts, the mechanism handles robot-obstacle and robot-robot collisions simultaneously. Then, during a replanning process, each robot selects the safe and minimum cost trajectory from the library based on user-defined requirements. Both the time-optimal motion primitive library and the occupancy information are computed offline, turning a time-consuming optimization problem into a linear-complexity selection problem. This enables the planner to comprehensively explore the non-convex, discontinuous 3-D safe space filled with numerous obstacles and robots, effectively identifying the best hidden path. Benchmark comparisons demonstrate that our method achieves the shortest flight time and traveled distance with a computation time of less than 1 ms in dense environments. Super large-scale swarm simulations, involving up to 1000 robots, running in real-time, verify the scalability of our method. Real-world experiments validate the feasibility and robustness of our approach. The code will be released to foster community collaboration.
Oracle Bone Script Similiar Character Screening Approach Based on Simsiam Contrastive Learning and Supervised Learning
Aug 13, 2024



This project proposes a new method that uses fuzzy comprehensive evaluation method to integrate ResNet-50 self-supervised and RepVGG supervised learning. The source image dataset HWOBC oracle is taken as input, the target image is selected, and finally the most similar image is output in turn without any manual intervention. The same feature encoding method is not used for images of different modalities. Before the model training, the image data is preprocessed, and the image is enhanced by random rotation processing, self-square graph equalization theory algorithm, and gamma transform, which effectively enhances the key feature learning. Finally, the fuzzy comprehensive evaluation method is used to combine the results of supervised training and unsupervised training, which can better solve the "most similar" problem that is difficult to quantify. At present, there are many unknown oracle-bone inscriptions waiting for us to crack. Contacting with the glyphs can provide new ideas for cracking.
Enhanced Decentralized Autonomous Aerial Swarm with Group Planning
Mar 02, 2022



Autonomous aerial swarm remains a grand challenge in robotics. Existing works in this field can be categorized as centralized and decentralized. Centralized methods suffer from scale dilemmas, while decentralized ones often lead to poor planning quality. In this paper, we propose an enhanced decentralized autonomous aerial swarm system with group planning. According to the spatial distribution of agents, the system dynamically divides the swarm into several groups and isolated agents. For conflicts within each group, we propose a novel coordination mechanism named group planning. The group planning consists of efficient multi-agent pathfinding and trajectory joint optimization, which can significantly improve the planning quality and success rate. We demonstrate simulations and real-world experiments that our method not only has applicability for a large-scale swarm, but also has top-level planning quality.