 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrimitive-Swarm: An Ultra-lightweight and Scalable Planner for Large-scale Aerial Swarms
Paper and Code
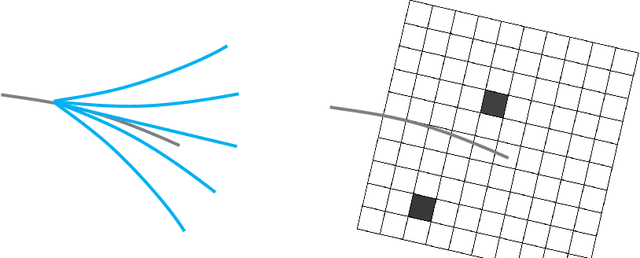
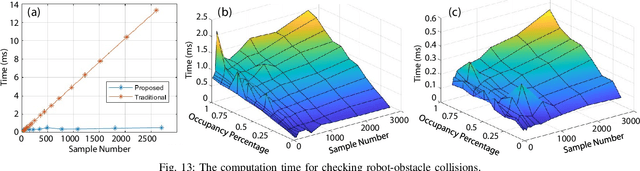
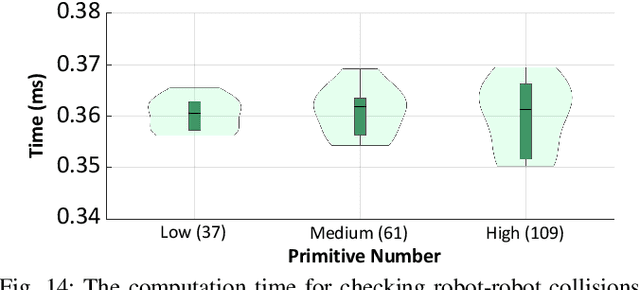
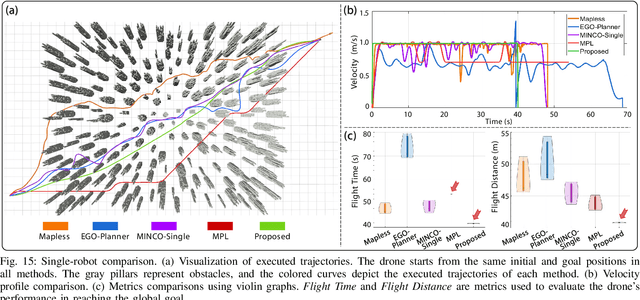
Achieving large-scale aerial swarms is challenging due to the inherent contradictions in balancing computational efficiency and scalability. This paper introduces Primitive-Swarm, an ultra-lightweight and scalable planner designed specifically for large-scale autonomous aerial swarms. The proposed approach adopts a decentralized and asynchronous replanning strategy. Within it is a novel motion primitive library consisting of time-optimal and dynamically feasible trajectories. They are generated utlizing a novel time-optimial path parameterization algorithm based on reachability analysis (TOPP-RA). Then, a rapid collision checking mechanism is developed by associating the motion primitives with the discrete surrounding space according to conflicts. By considering both spatial and temporal conflicts, the mechanism handles robot-obstacle and robot-robot collisions simultaneously. Then, during a replanning process, each robot selects the safe and minimum cost trajectory from the library based on user-defined requirements. Both the time-optimal motion primitive library and the occupancy information are computed offline, turning a time-consuming optimization problem into a linear-complexity selection problem. This enables the planner to comprehensively explore the non-convex, discontinuous 3-D safe space filled with numerous obstacles and robots, effectively identifying the best hidden path. Benchmark comparisons demonstrate that our method achieves the shortest flight time and traveled distance with a computation time of less than 1 ms in dense environments. Super large-scale swarm simulations, involving up to 1000 robots, running in real-time, verify the scalability of our method. Real-world experiments validate the feasibility and robustness of our approach. The code will be released to foster community collaboration.