 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLie Theory Based Optimization for Unified State Planning of Mobile Manipulators
Oct 20, 2024



Mobile manipulators are finding use in numerous practical applications. The current issues with mobile manipulation are the large state space owing to the mobile base and the challenge of modeling high degree of freedom systems. It is critical to devise fast and accurate algorithms that generate smooth motion plans for such mobile manipulators. Existing techniques attempt to solve this problem but focus on separating the motion of the base and manipulator. We propose an approach using Lie theory to find the inverse kinematic constraints by converting the kinematic model, created using screw coordinates, between its Lie group and vector representation. An optimization function is devised to solve for the desired joint states of the entire mobile manipulator. This allows the motion of the mobile base and manipulator to be planned and applied in unison resulting in a smooth and accurate motion plan. The performance of the proposed state planner is validated on simulated mobile manipulators in an analytical experiment. Our solver is available with further derivations and results at https://github.com/peleito/slithers.
3D Neuron Morphology Analysis
Dec 14, 2022


We consider the problem of finding an accurate representation of neuron shapes, extracting sub-cellular features, and classifying neurons based on neuron shapes. In neuroscience research, the skeleton representation is often used as a compact and abstract representation of neuron shapes. However, existing methods are limited to getting and analyzing "curve" skeletons which can only be applied for tubular shapes. This paper presents a 3D neuron morphology analysis method for more general and complex neuron shapes. First, we introduce the concept of skeleton mesh to represent general neuron shapes and propose a novel method for computing mesh representations from 3D surface point clouds. A skeleton graph is then obtained from skeleton mesh and is used to extract sub-cellular features. Finally, an unsupervised learning method is used to embed the skeleton graph for neuron classification. Extensive experiment results are provided and demonstrate the robustness of our method to analyze neuron morphology.
Learning Task Requirements and Agent Capabilities for Multi-agent Task Allocation
Nov 08, 2022



This paper presents a learning framework to estimate an agent capability and task requirement model for multi-agent task allocation. With a set of team configurations and the corresponding task performances as the training data, linear task constraints can be learned to be embedded in many existing optimization-based task allocation frameworks. Comprehensive computational evaluations are conducted to test the scalability and prediction accuracy of the learning framework with a limited number of team configurations and performance pairs. A ROS and Gazebo-based simulation environment is developed to validate the proposed requirements learning and task allocation framework in practical multi-agent exploration and manipulation tasks. Results show that the learning process for scenarios with 40 tasks and 6 types of agents uses around 12 seconds, ending up with prediction errors in the range of 0.5-2%.
Neural Radiance Fields for Outdoor Scene Relighting
Dec 09, 2021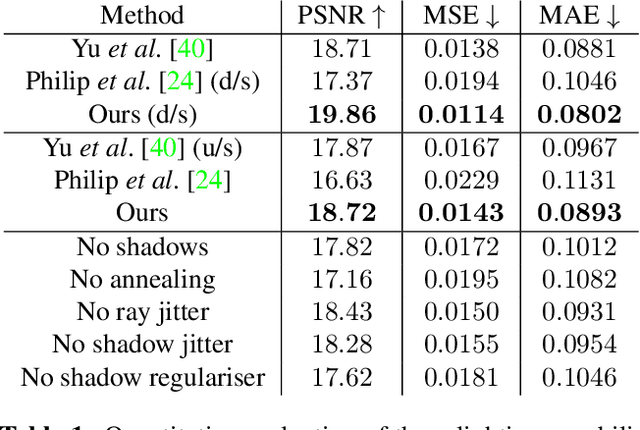
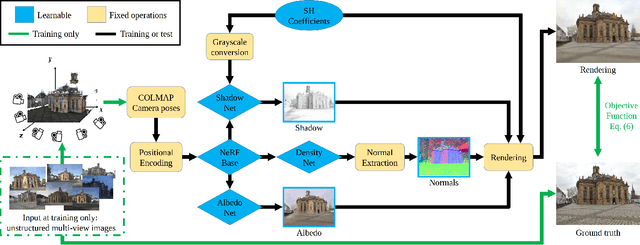
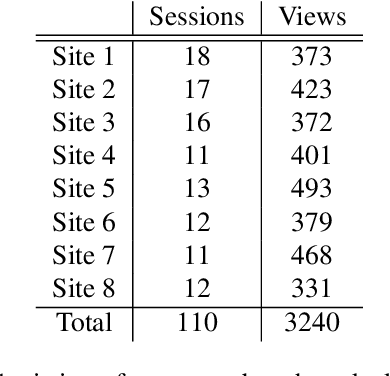
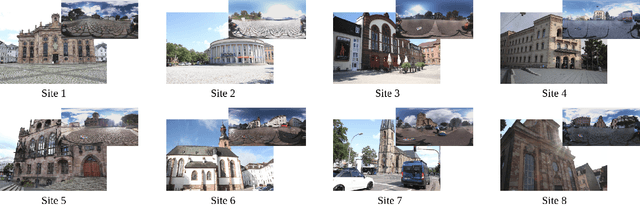
Photorealistic editing of outdoor scenes from photographs requires a profound understanding of the image formation process and an accurate estimation of the scene geometry, reflectance and illumination. A delicate manipulation of the lighting can then be performed while keeping the scene albedo and geometry unaltered. We present NeRF-OSR, i.e., the first approach for outdoor scene relighting based on neural radiance fields. In contrast to the prior art, our technique allows simultaneous editing of both scene illumination and camera viewpoint using only a collection of outdoor photos shot in uncontrolled settings. Moreover, it enables direct control over the scene illumination, as defined through a spherical harmonics model. It also includes a dedicated network for shadow reproduction, which is crucial for high-quality outdoor scene relighting. To evaluate the proposed method, we collect a new benchmark dataset of several outdoor sites, where each site is photographed from multiple viewpoints and at different timings. For each timing, a 360 degrees environment map is captured together with a colour-calibration chequerboard to allow accurate numerical evaluations on real data against ground truth. Comparisons against state of the art show that NeRF-OSR enables controllable lighting and viewpoint editing at higher quality and with realistic self-shadowing reproduction. Our method and the dataset will be made publicly available at https://4dqv.mpi-inf.mpg.de/NeRF-OSR/.
Robust Task Scheduling for Heterogeneous Robot Teams under Capability Uncertainty
Jun 23, 2021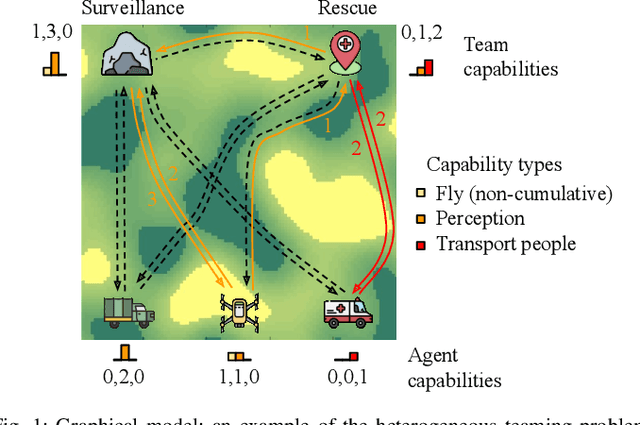
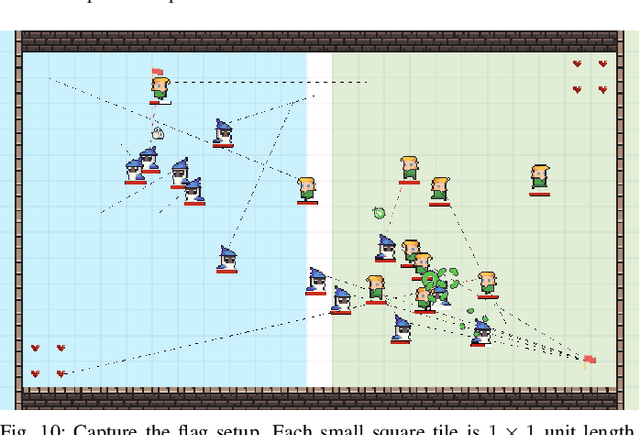

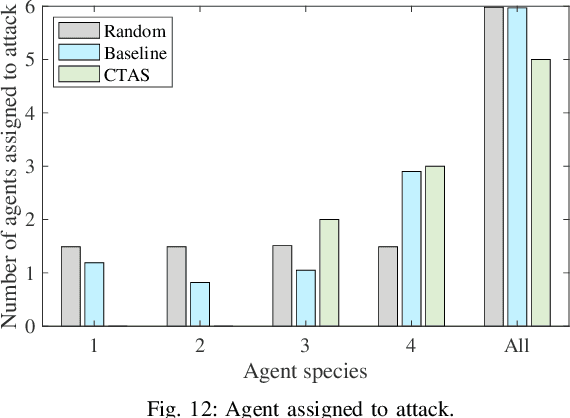
This paper develops a stochastic programming framework for multi-agent systems where task decomposition, assignment, and scheduling problems are simultaneously optimized. Due to their inherent flexibility and robustness, multi-agent systems are applied in a growing range of real-world problems that involve heterogeneous tasks and uncertain information. Most previous works assume a unique way to decompose a task into roles that can later be assigned to the agents. This assumption is not valid for a complex task where the roles can vary and multiple decomposition structures exist. Meanwhile, it is unclear how uncertainties in task requirements and agent capabilities can be systematically quantified and optimized under a multi-agent system setting. A representation for complex tasks is proposed to avoid the non-convex task decomposition enumeration: agent capabilities are represented as a vector of random distributions, and task requirements are verified by a generalizable binary function. The conditional value at risk (CVaR) is chosen as a metric in the objective function to generate robust plans. An efficient algorithm is described to solve the model, and the whole framework is evaluated in two different practical test cases: capture-the-flag and robotic service coordination during a pandemic (e.g., COVID-19). Results demonstrate that the framework is scalable, generalizable, and provides low-cost plans that ensure a high probability of success.
Heterogeneous Vehicle Routing and Teaming with Gaussian Distributed Energy Uncertainty
Oct 22, 2020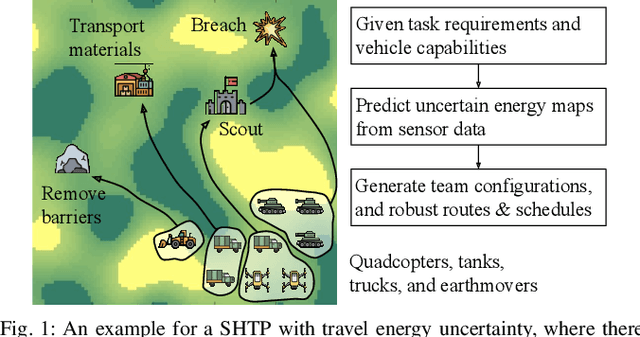
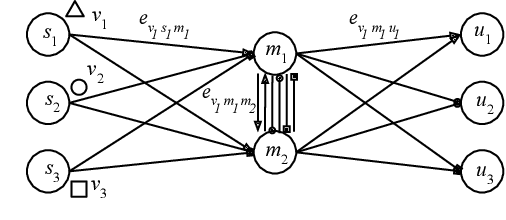
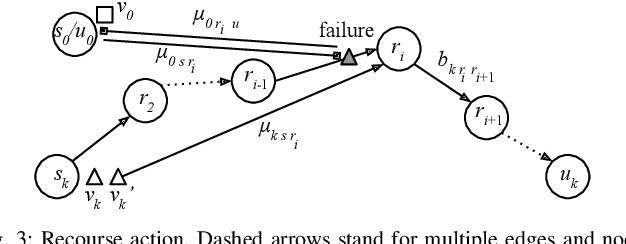

For robot swarms operating on complex missions in an uncertain environment, it is important that the decision-making algorithm considers both heterogeneity and uncertainty. This paper presents a stochastic programming framework for the vehicle routing problem with stochastic travel energy costs and heterogeneous vehicles and tasks. We represent the heterogeneity as linear constraints, estimate the uncertain energy cost through Gaussian process regression, formulate this stochasticity as chance constraints or stochastic recourse costs, and then solve the stochastic programs using branch and cut algorithms to minimize the expected energy cost. The performance and practicality are demonstrated through extensive computational experiments and a practical test case.
Machine Learning Algorithms for Active Monitoring of High Performance Computing as a Service (HPCaaS) Cloud Environments
Sep 26, 2020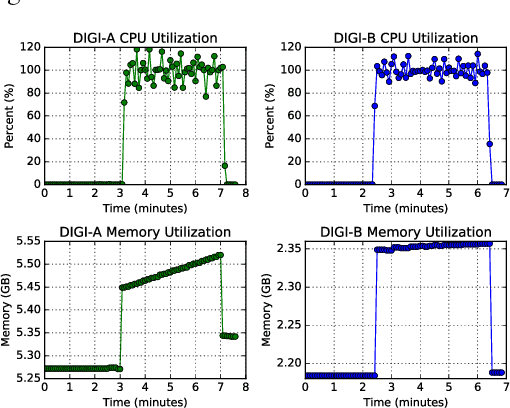
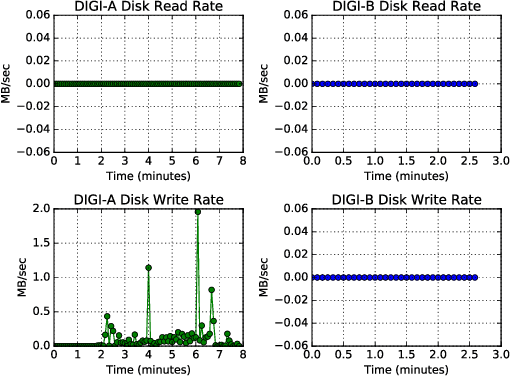
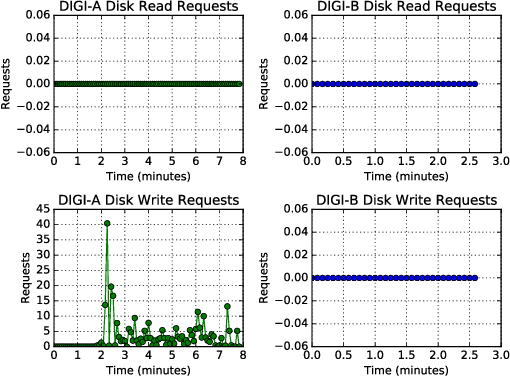
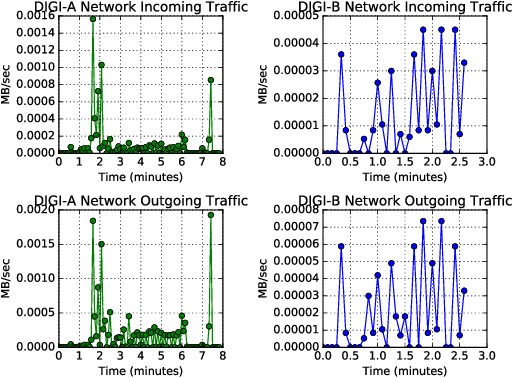
Cloud computing provides ubiquitous and on-demand access to vast reconfigurable resources that can meet any computational need. Many service models are available, but the Infrastructure as a Service (IaaS) model is particularly suited to operate as a high performance computing (HPC) platform, by networking large numbers of cloud computing nodes. We used the Pacific Northwest National Laboratory (PNNL) cloud computing environment to perform our experiments. A number of cloud computing providers such as Amazon Web Services, Microsoft Azure, or IBM Cloud, offer flexible and scalable computing resources. This paper explores the viability identifying types of engineering applications running on a cloud infrastructure configured as an HPC platform using privacy preserving features as input to statistical models. The engineering applications considered in this work include MCNP6, a radiation transport code developed by Los Alamos National Laboratory, OpenFOAM, an open source computational fluid dynamics code, and CADO-NFS, a numerical implementation of the general number field sieve algorithm used for prime number factorization. Our experiments use the OpenStack cloud management tool to create a cloud HPC environment and the privacy preserving Ceilometer billing meters as classification features to demonstrate identification of these applications.
BioFaceNet: Deep Biophysical Face Image Interpretation
Sep 13, 2019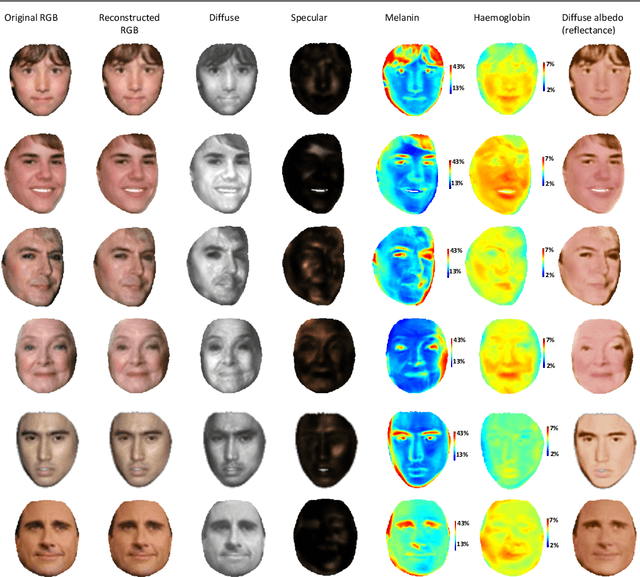

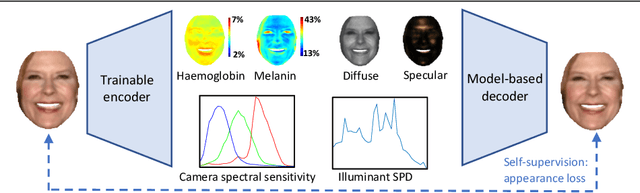
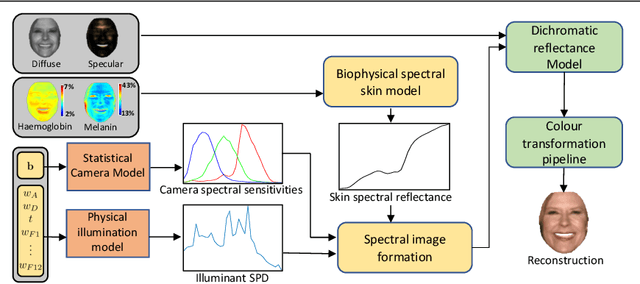
In this paper we present BioFaceNet, a deep CNN that learns to decompose a single face image into biophysical parameters maps, diffuse and specular shading maps as well as estimating the spectral power distribution of the scene illuminant and the spectral sensitivity of the camera. The network comprises a fully convolutional encoder for estimating the spatial maps with a fully connected branch for estimating the vector quantities. The network is trained using a self-supervised appearance loss computed via a model-based decoder. The task is highly underconstrained so we impose a number of model-based priors. Skin spectral reflectance is restricted to a biophysical model, we impose a statistical prior on camera spectral sensitivities, a physical constraint on illumination spectra, a sparsity prior on specular reflections and direct supervision on diffuse shading using a rough shape proxy. We show convincing qualitative results on in-the-wild data and introduce a benchmark for quantitative evaluation on this new task.
Orientation-aware Semantic Segmentation on Icosahedron Spheres
Jul 30, 2019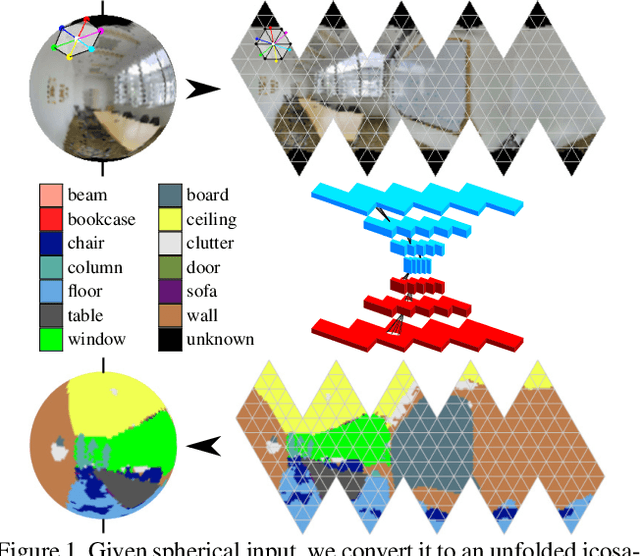
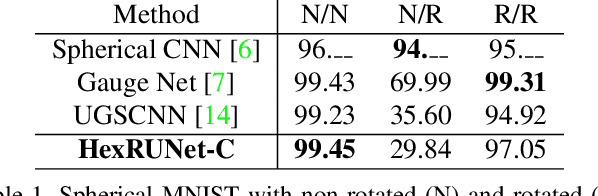


We address semantic segmentation on omnidirectional images, to leverage a holistic understanding of the surrounding scene for applications like autonomous driving systems. For the spherical domain, several methods recently adopt an icosahedron mesh, but systems are typically rotation invariant or require significant memory and parameters, thus enabling execution only at very low resolutions. In our work, we propose an orientation-aware CNN framework for the icosahedron mesh. Our representation allows for fast network operations, as our design simplifies to standard network operations of classical CNNs, but under consideration of north-aligned kernel convolutions for features on the sphere. We implement our representation and demonstrate its memory efficiency up-to a level-8 resolution mesh (equivalent to 640 x 1024 equirectangular images). Finally, since our kernels operate on the tangent of the sphere, standard feature weights, pretrained on perspective data, can be directly transferred with only small need for weight refinement. In our evaluation our orientation-aware CNN becomes a new state of the art for the recent 2D3DS dataset, and our Omni-SYNTHIA version of SYNTHIA. Rotation invariant classification and segmentation tasks are additionally presented for comparison to prior art.
Non-rigid 3D Shape Registration using an Adaptive Template
Sep 22, 2018
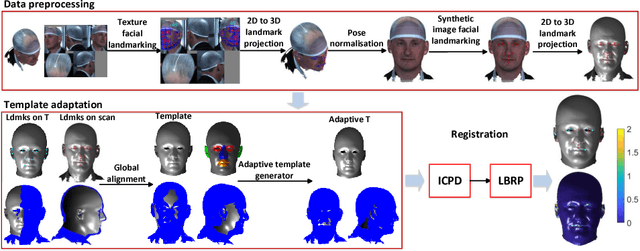
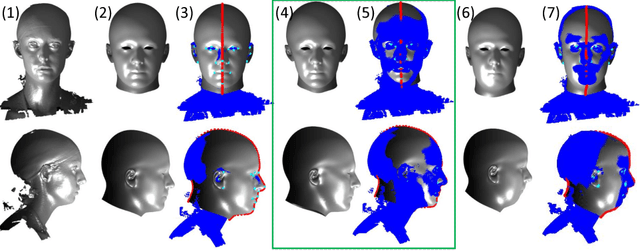

We present a new fully-automatic non-rigid 3D shape registration (morphing) framework comprising (1) a new 3D landmarking and pose normalisation method; (2) an adaptive shape template method to accelerate the convergence of registration algorithms and achieve a better final shape correspondence and (3) a new iterative registration method that combines Iterative Closest Points with Coherent Point Drift (CPD) to achieve a more stable and accurate correspondence establishment than standard CPD. We call this new morphing approach Iterative Coherent Point Drift (ICPD). Our proposed framework is evaluated qualitatively and quantitatively on three datasets and compared with several other methods. The proposed framework is shown to give state-of-the-art performance.