 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-robot Matching and Routing for Multi-robot Tour Guiding under Time Uncertainty
Sep 27, 2023



This work presents a framework for multi-robot tour guidance in a partially known environment with uncertainty, such as a museum. A simultaneous matching and routing problem (SMRP) is formulated to match the humans with robot guides according to their requested places of interest (POIs) and generate the routes for the robots according to uncertain time estimation. A large neighborhood search algorithm is developed to efficiently find sub-optimal low-cost solutions for the SMRP. The scalability and optimality of the multi-robot planner are evaluated computationally. The largest case tested involves 50 robots, 250 humans, and 50 POIs. A photo-realistic multi-robot simulation was developed to verify the tour guiding performance in an uncertain indoor environment.
Learning Task Requirements and Agent Capabilities for Multi-agent Task Allocation
Nov 08, 2022



This paper presents a learning framework to estimate an agent capability and task requirement model for multi-agent task allocation. With a set of team configurations and the corresponding task performances as the training data, linear task constraints can be learned to be embedded in many existing optimization-based task allocation frameworks. Comprehensive computational evaluations are conducted to test the scalability and prediction accuracy of the learning framework with a limited number of team configurations and performance pairs. A ROS and Gazebo-based simulation environment is developed to validate the proposed requirements learning and task allocation framework in practical multi-agent exploration and manipulation tasks. Results show that the learning process for scenarios with 40 tasks and 6 types of agents uses around 12 seconds, ending up with prediction errors in the range of 0.5-2%.
Simultaneous Human-robot Matching and Routing for Multi-robot Tour Guiding under Time Uncertainty
Jan 25, 2022



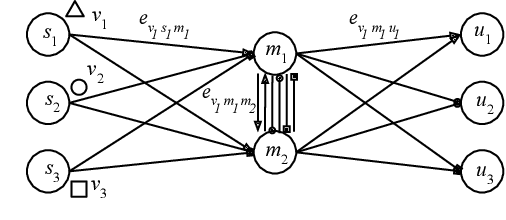
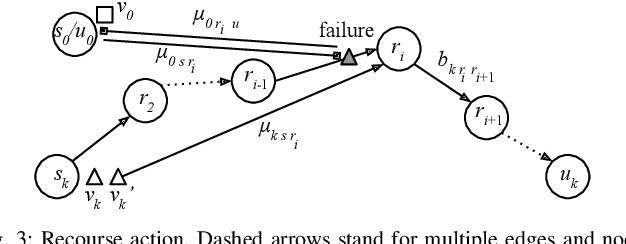
This work presents a framework for multi-robot tour guidance in a partially known environment with uncertainty, such as a museum. In the proposed centralized multi-robot planner, a simultaneous matching and routing problem (SMRP) is formulated to match the humans with robot guides according to their selected places of interest (POIs) and generate the routes and schedules for the robots according to uncertain spatial and time estimation. A large neighborhood search algorithm is developed to efficiently find sub-optimal low-cost solutions for the SMRP. The scalability and optimality of the multi-robot planner are evaluated computationally under different numbers of humans, robots, and POIs. The largest case tested involves 50 robots, 250 humans, and 50 POIs. Then, a photo-realistic multi-robot simulation platform was developed based on Habitat-AI to verify the tour guiding performance in an uncertain indoor environment. Results demonstrate that the proposed centralized tour planner is scalable, makes a smooth trade-off in the plans under different environmental constraints, and can lead to robust performance with inaccurate uncertainty estimations (within a certain margin).
Robust Task Scheduling for Heterogeneous Robot Teams under Capability Uncertainty
Jun 23, 2021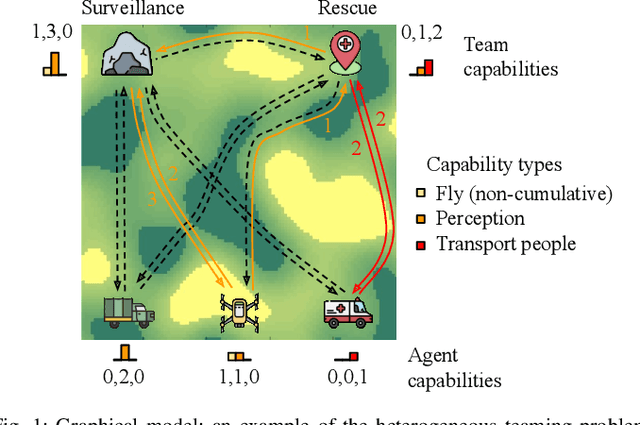
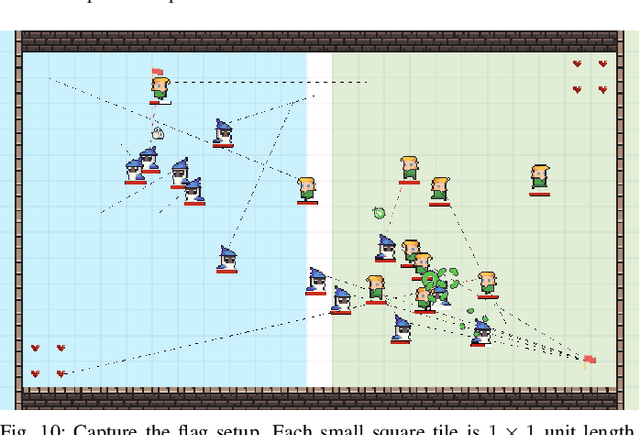

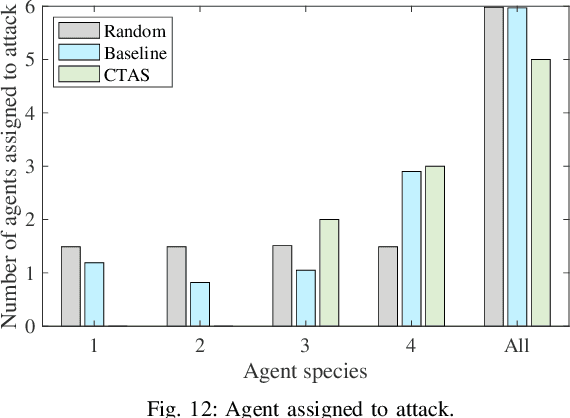
This paper develops a stochastic programming framework for multi-agent systems where task decomposition, assignment, and scheduling problems are simultaneously optimized. Due to their inherent flexibility and robustness, multi-agent systems are applied in a growing range of real-world problems that involve heterogeneous tasks and uncertain information. Most previous works assume a unique way to decompose a task into roles that can later be assigned to the agents. This assumption is not valid for a complex task where the roles can vary and multiple decomposition structures exist. Meanwhile, it is unclear how uncertainties in task requirements and agent capabilities can be systematically quantified and optimized under a multi-agent system setting. A representation for complex tasks is proposed to avoid the non-convex task decomposition enumeration: agent capabilities are represented as a vector of random distributions, and task requirements are verified by a generalizable binary function. The conditional value at risk (CVaR) is chosen as a metric in the objective function to generate robust plans. An efficient algorithm is described to solve the model, and the whole framework is evaluated in two different practical test cases: capture-the-flag and robotic service coordination during a pandemic (e.g., COVID-19). Results demonstrate that the framework is scalable, generalizable, and provides low-cost plans that ensure a high probability of success.
Heterogeneous Vehicle Routing and Teaming with Gaussian Distributed Energy Uncertainty
Oct 22, 2020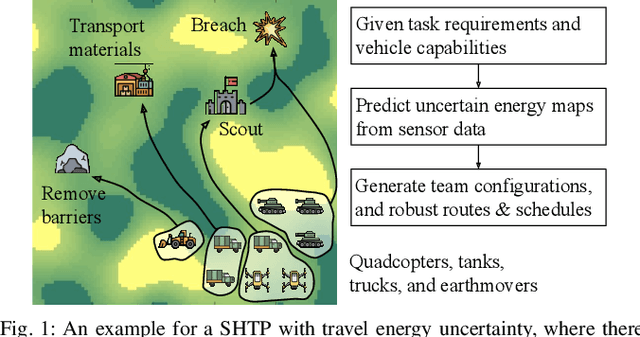

For robot swarms operating on complex missions in an uncertain environment, it is important that the decision-making algorithm considers both heterogeneity and uncertainty. This paper presents a stochastic programming framework for the vehicle routing problem with stochastic travel energy costs and heterogeneous vehicles and tasks. We represent the heterogeneity as linear constraints, estimate the uncertain energy cost through Gaussian process regression, formulate this stochasticity as chance constraints or stochastic recourse costs, and then solve the stochastic programs using branch and cut algorithms to minimize the expected energy cost. The performance and practicality are demonstrated through extensive computational experiments and a practical test case.