 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Implicit Social Navigation Behavior using Deep Inverse Reinforcement Learning
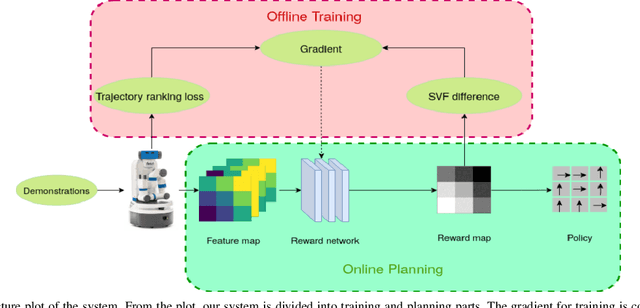
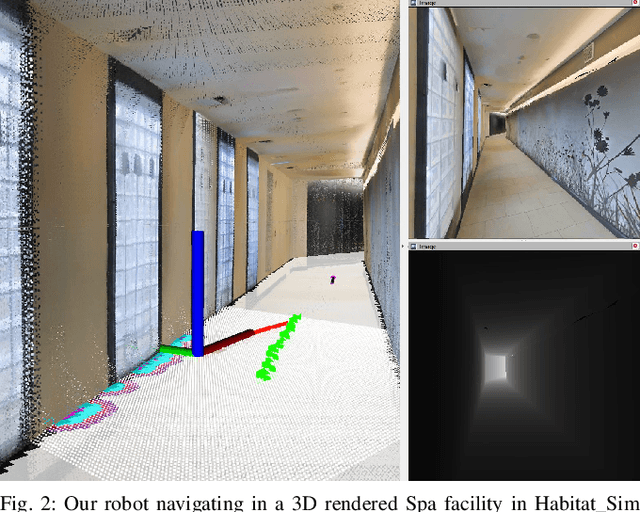
Jan 12, 2025This paper reports on learning a reward map for social navigation in dynamic environments where the robot can reason about its path at any time, given agents' trajectories and scene geometry. Humans navigating in dense and dynamic indoor environments often work with several implied social rules. A rule-based approach fails to model all possible interactions between humans, robots, and scenes. We propose a novel Smooth Maximum Entropy Deep Inverse Reinforcement Learning (S-MEDIRL) algorithm that can extrapolate beyond expert demos to better encode scene navigability from few-shot demonstrations. The agent learns to predict the cost maps reasoning on trajectory data and scene geometry. The agent samples a trajectory that is then executed using a local crowd navigation controller. We present results in a photo-realistic simulation environment, with a robot and a human navigating a narrow crossing scenario. The robot implicitly learns to exhibit social behaviors such as yielding to oncoming traffic and avoiding deadlocks. We compare the proposed approach to the popular model-based crowd navigation algorithm ORCA and a rule-based agent that exhibits yielding.
Human-robot Matching and Routing for Multi-robot Tour Guiding under Time Uncertainty
Sep 27, 2023



This work presents a framework for multi-robot tour guidance in a partially known environment with uncertainty, such as a museum. A simultaneous matching and routing problem (SMRP) is formulated to match the humans with robot guides according to their requested places of interest (POIs) and generate the routes for the robots according to uncertain time estimation. A large neighborhood search algorithm is developed to efficiently find sub-optimal low-cost solutions for the SMRP. The scalability and optimality of the multi-robot planner are evaluated computationally. The largest case tested involves 50 robots, 250 humans, and 50 POIs. A photo-realistic multi-robot simulation was developed to verify the tour guiding performance in an uncertain indoor environment.
SoLo T-DIRL: Socially-Aware Dynamic Local Planner based on Trajectory-Ranked Deep Inverse Reinforcement Learning
Sep 16, 2022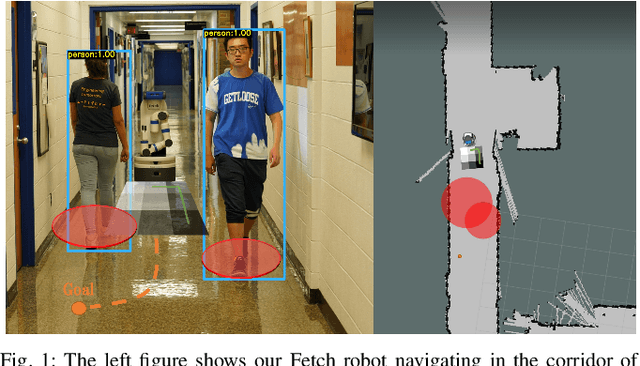


This work proposes a new framework for a socially-aware dynamic local planner in crowded environments by building on the recently proposed Trajectory-ranked Maximum Entropy Deep Inverse Reinforcement Learning (T-MEDIRL). To address the social navigation problem, our multi-modal learning planner explicitly considers social interaction factors, as well as social-awareness factors into T-MEDIRL pipeline to learn a reward function from human demonstrations. Moreover, we propose a novel trajectory ranking score using the sudden velocity change of pedestrians around the robot to address the sub-optimality in human demonstrations. Our evaluation shows that this method can successfully make a robot navigate in a crowded social environment and outperforms the state-of-art social navigation methods in terms of the success rate, navigation time, and invasion rate.
Providers-Clients-Robots: Framework for spatial-semantic planning for shared understanding in human-robot interaction
Jun 21, 2022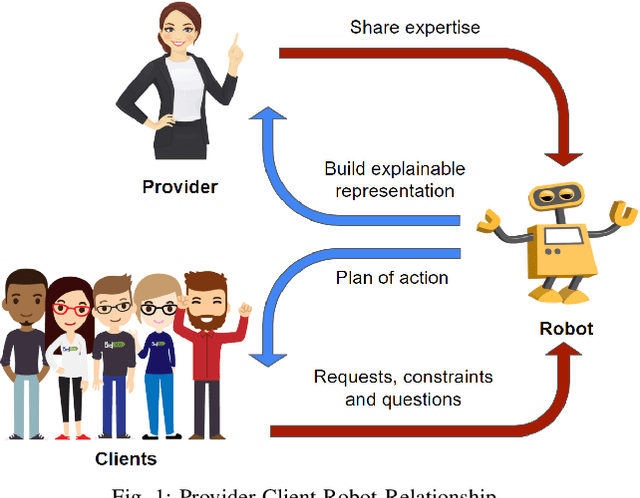
This paper develops a novel framework called Providers-Clients-Robots (PCR), applicable to socially assistive robots that support research on shared understanding in human-robot interactions. Providers, Clients, and Robots share an actionable and intuitive representation of the environment to create plans that best satisfy the combined needs of all parties. The plans are formed via interaction between the Client and the Robot based on a previously built multi-modal navigation graph. The explainable environmental representation in the form of a navigation graph is constructed collaboratively between Providers and Robots prior to interaction with Clients. We develop a realization of the proposed framework to create a spatial-semantic representation of an indoor environment autonomously. Moreover, we develop a planner that takes in constraints from Providers and Clients of the establishment and dynamically plans a sequence of visits to each area of interest. Evaluations show that the proposed realization of the PCR framework can successfully make plans while satisfying the specified time budget and sequence constraints and outperforming the greedy baseline.
Simultaneous Human-robot Matching and Routing for Multi-robot Tour Guiding under Time Uncertainty
Jan 25, 2022



This work presents a framework for multi-robot tour guidance in a partially known environment with uncertainty, such as a museum. In the proposed centralized multi-robot planner, a simultaneous matching and routing problem (SMRP) is formulated to match the humans with robot guides according to their selected places of interest (POIs) and generate the routes and schedules for the robots according to uncertain spatial and time estimation. A large neighborhood search algorithm is developed to efficiently find sub-optimal low-cost solutions for the SMRP. The scalability and optimality of the multi-robot planner are evaluated computationally under different numbers of humans, robots, and POIs. The largest case tested involves 50 robots, 250 humans, and 50 POIs. Then, a photo-realistic multi-robot simulation platform was developed based on Habitat-AI to verify the tour guiding performance in an uncertain indoor environment. Results demonstrate that the proposed centralized tour planner is scalable, makes a smooth trade-off in the plans under different environmental constraints, and can lead to robust performance with inaccurate uncertainty estimations (within a certain margin).