 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProviders-Clients-Robots: Framework for spatial-semantic planning for shared understanding in human-robot interaction
Paper and Code
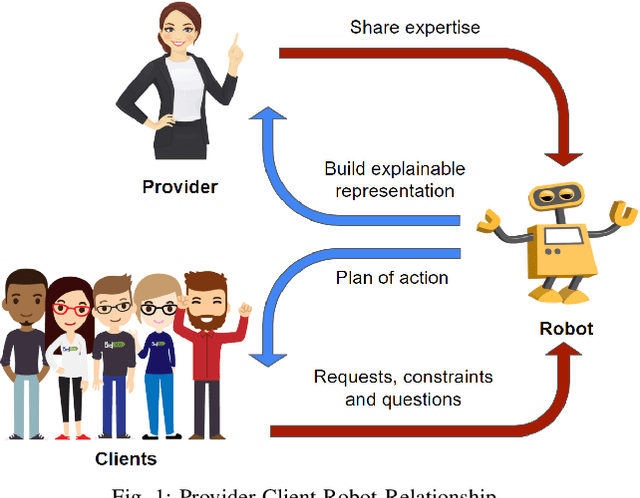
This paper develops a novel framework called Providers-Clients-Robots (PCR), applicable to socially assistive robots that support research on shared understanding in human-robot interactions. Providers, Clients, and Robots share an actionable and intuitive representation of the environment to create plans that best satisfy the combined needs of all parties. The plans are formed via interaction between the Client and the Robot based on a previously built multi-modal navigation graph. The explainable environmental representation in the form of a navigation graph is constructed collaboratively between Providers and Robots prior to interaction with Clients. We develop a realization of the proposed framework to create a spatial-semantic representation of an indoor environment autonomously. Moreover, we develop a planner that takes in constraints from Providers and Clients of the establishment and dynamically plans a sequence of visits to each area of interest. Evaluations show that the proposed realization of the PCR framework can successfully make plans while satisfying the specified time budget and sequence constraints and outperforming the greedy baseline.