 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoLo T-DIRL: Socially-Aware Dynamic Local Planner based on Trajectory-Ranked Deep Inverse Reinforcement Learning
Paper and Code
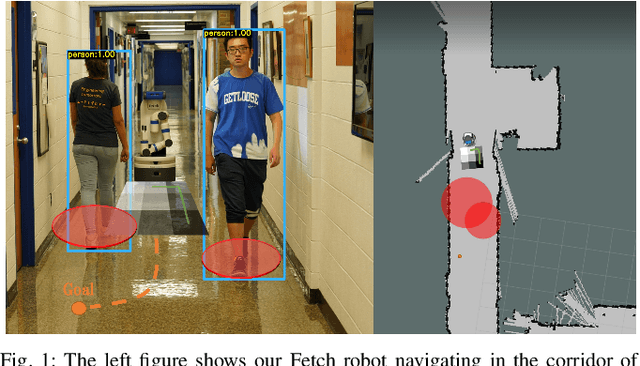
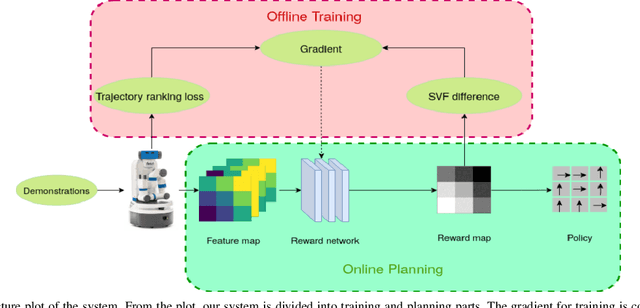


This work proposes a new framework for a socially-aware dynamic local planner in crowded environments by building on the recently proposed Trajectory-ranked Maximum Entropy Deep Inverse Reinforcement Learning (T-MEDIRL). To address the social navigation problem, our multi-modal learning planner explicitly considers social interaction factors, as well as social-awareness factors into T-MEDIRL pipeline to learn a reward function from human demonstrations. Moreover, we propose a novel trajectory ranking score using the sudden velocity change of pedestrians around the robot to address the sub-optimality in human demonstrations. Our evaluation shows that this method can successfully make a robot navigate in a crowded social environment and outperforms the state-of-art social navigation methods in terms of the success rate, navigation time, and invasion rate.