 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Robot Learning for Automatic Robot Motion Planning in Manufacturing
Feb 26, 2025Industrial robots are widely used in diverse manufacturing environments. Nonetheless, how to enable robots to automatically plan trajectories for changing tasks presents a considerable challenge. Further complexities arise when robots operate within work cells alongside machines, humans, or other robots. This paper introduces a multi-level hybrid robot motion planning method combining a task space Reinforcement Learning-based Learning from Demonstration (RL-LfD) agent and a joint-space based Deep Reinforcement Learning (DRL) based agent. A higher level agent learns to switch between the two agents to enable feasible and smooth motion. The feasibility is computed by incorporating reachability, joint limits, manipulability, and collision risks of the robot in the given environment. Therefore, the derived hybrid motion planning policy generates a feasible trajectory that adheres to task constraints. The effectiveness of the method is validated through sim ulated robotic scenarios and in a real-world setup.
Feature Space Augmentation for Long-Tailed Data
Aug 09, 2020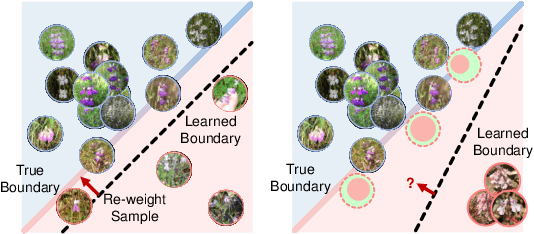
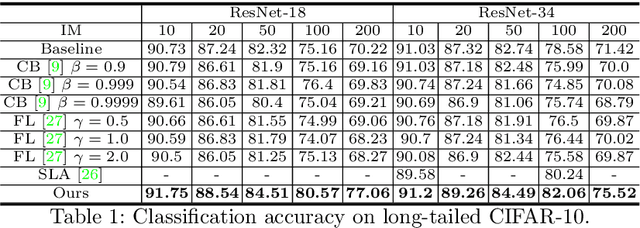
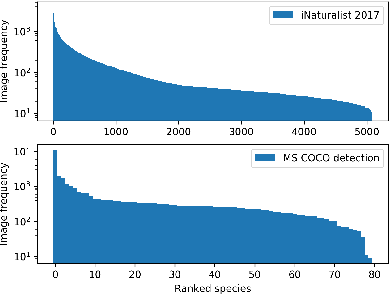
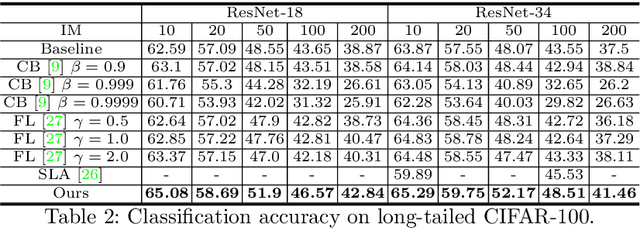
Real-world data often follow a long-tailed distribution as the frequency of each class is typically different. For example, a dataset can have a large number of under-represented classes and a few classes with more than sufficient data. However, a model to represent the dataset is usually expected to have reasonably homogeneous performances across classes. Introducing class-balanced loss and advanced methods on data re-sampling and augmentation are among the best practices to alleviate the data imbalance problem. However, the other part of the problem about the under-represented classes will have to rely on additional knowledge to recover the missing information. In this work, we present a novel approach to address the long-tailed problem by augmenting the under-represented classes in the feature space with the features learned from the classes with ample samples. In particular, we decompose the features of each class into a class-generic component and a class-specific component using class activation maps. Novel samples of under-represented classes are then generated on the fly during training stages by fusing the class-specific features from the under-represented classes with the class-generic features from confusing classes. Our results on different datasets such as iNaturalist, ImageNet-LT, Places-LT and a long-tailed version of CIFAR have shown the state of the art performances.