 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStop Probing, Start Coding: Why Linear Probes and Sparse Autoencoders Fail at Compositional Generalisation
Mar 30, 2026The linear representation hypothesis states that neural network activations encode high-level concepts as linear mixtures. However, under superposition, this encoding is a projection from a higher-dimensional concept space into a lower-dimensional activation space, and a linear decision boundary in the concept space need not remain linear after projection. In this setting, classical sparse coding methods with per-sample iterative inference leverage compressed sensing guarantees to recover latent factors. Sparse autoencoders (SAEs), on the other hand, amortise sparse inference into a fixed encoder, introducing a systematic gap. We show this amortisation gap persists across training set sizes, latent dimensions, and sparsity levels, causing SAEs to fail under out-of-distribution (OOD) compositional shifts. Through controlled experiments that decompose the failure, we identify dictionary learning -- not the inference procedure -- as the binding constraint: SAE-learned dictionaries point in substantially wrong directions, and replacing the encoder with per-sample FISTA on the same dictionary does not close the gap. An oracle baseline proves the problem is solvable with a good dictionary at all scales tested. Our results reframe the SAE failure as a dictionary learning challenge, not an amortisation problem, and point to scalable dictionary learning as the key open problem for sparse inference under superposition.
Who Guards the Guardians? The Challenges of Evaluating Identifiability of Learned Representations
Feb 27, 2026Identifiability in representation learning is commonly evaluated using standard metrics (e.g., MCC, DCI, R^2) on synthetic benchmarks with known ground-truth factors. These metrics are assumed to reflect recovery up to the equivalence class guaranteed by identifiability theory. We show that this assumption holds only under specific structural conditions: each metric implicitly encodes assumptions about both the data-generating process (DGP) and the encoder. When these assumptions are violated, metrics become misspecified and can produce systematic false positives and false negatives. Such failures occur both within classical identifiability regimes and in post-hoc settings where identifiability is most needed. We introduce a taxonomy separating DGP assumptions from encoder geometry, use it to characterise the validity domains of existing metrics, and release an evaluation suite for reproducible stress testing and comparison.
Causality is Key for Interpretability Claims to Generalise
Feb 18, 2026Interpretability research on large language models (LLMs) has yielded important insights into model behaviour, yet recurring pitfalls persist: findings that do not generalise, and causal interpretations that outrun the evidence. Our position is that causal inference specifies what constitutes a valid mapping from model activations to invariant high-level structures, the data or assumptions needed to achieve it, and the inferences it can support. Specifically, Pearl's causal hierarchy clarifies what an interpretability study can justify. Observations establish associations between model behaviour and internal components. Interventions (e.g., ablations or activation patching) support claims how these edits affect a behavioural metric (\eg, average change in token probabilities) over a set of prompts. However, counterfactual claims -- i.e., asking what the model output would have been for the same prompt under an unobserved intervention -- remain largely unverifiable without controlled supervision. We show how causal representation learning (CRL) operationalises this hierarchy, specifying which variables are recoverable from activations and under what assumptions. Together, these motivate a diagnostic framework that helps practitioners select methods and evaluations matching claims to evidence such that findings generalise.
From Isolation to Entanglement: When Do Interpretability Methods Identify and Disentangle Known Concepts?
Dec 17, 2025A central goal of interpretability is to recover representations of causally relevant concepts from the activations of neural networks. The quality of these concept representations is typically evaluated in isolation, and under implicit independence assumptions that may not hold in practice. Thus, it is unclear whether common featurization methods - including sparse autoencoders (SAEs) and sparse probes - recover disentangled representations of these concepts. This study proposes a multi-concept evaluation setting where we control the correlations between textual concepts, such as sentiment, domain, and tense, and analyze performance under increasing correlations between them. We first evaluate the extent to which featurizers can learn disentangled representations of each concept under increasing correlational strengths. We observe a one-to-many relationship from concepts to features: features correspond to no more than one concept, but concepts are distributed across many features. Then, we perform steering experiments, measuring whether each concept is independently manipulable. Even when trained on uniform distributions of concepts, SAE features generally affect many concepts when steered, indicating that they are neither selective nor independent; nonetheless, features affect disjoint subspaces. These results suggest that correlational metrics for measuring disentanglement are generally not sufficient for establishing independence when steering, and that affecting disjoint subspaces is not sufficient for concept selectivity. These results underscore the importance of compositional evaluations in interpretability research.
Contextual fusion enhances robustness to image blurring
Jun 07, 2024Mammalian brains handle complex reasoning by integrating information across brain regions specialized for particular sensory modalities. This enables improved robustness and generalization versus deep neural networks, which typically process one modality and are vulnerable to perturbations. While defense methods exist, they do not generalize well across perturbations. We developed a fusion model combining background and foreground features from CNNs trained on Imagenet and Places365. We tested its robustness to human-perceivable perturbations on MS COCO. The fusion model improved robustness, especially for classes with greater context variability. Our proposed solution for integrating multiple modalities provides a new approach to enhance robustness and may be complementary to existing methods.
Dynamic Inference with Neural Interpreters
Oct 12, 2021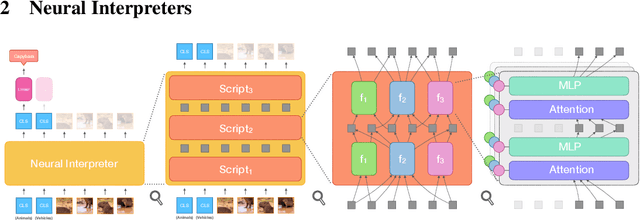
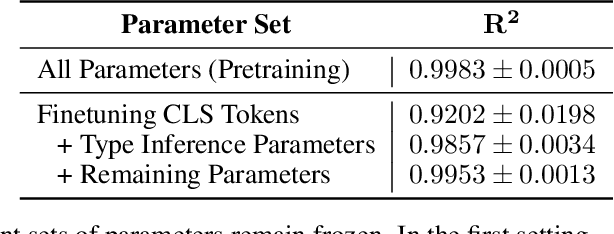
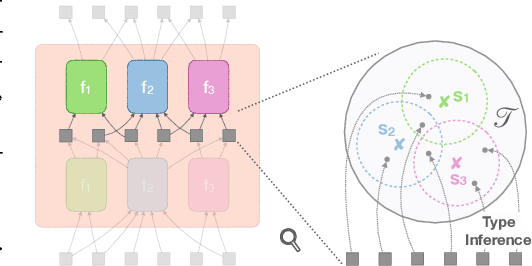
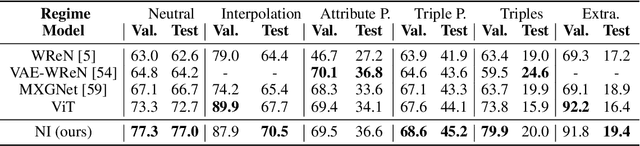
Modern neural network architectures can leverage large amounts of data to generalize well within the training distribution. However, they are less capable of systematic generalization to data drawn from unseen but related distributions, a feat that is hypothesized to require compositional reasoning and reuse of knowledge. In this work, we present Neural Interpreters, an architecture that factorizes inference in a self-attention network as a system of modules, which we call \emph{functions}. Inputs to the model are routed through a sequence of functions in a way that is end-to-end learned. The proposed architecture can flexibly compose computation along width and depth, and lends itself well to capacity extension after training. To demonstrate the versatility of Neural Interpreters, we evaluate it in two distinct settings: image classification and visual abstract reasoning on Raven Progressive Matrices. In the former, we show that Neural Interpreters perform on par with the vision transformer using fewer parameters, while being transferrable to a new task in a sample efficient manner. In the latter, we find that Neural Interpreters are competitive with respect to the state-of-the-art in terms of systematic generalization
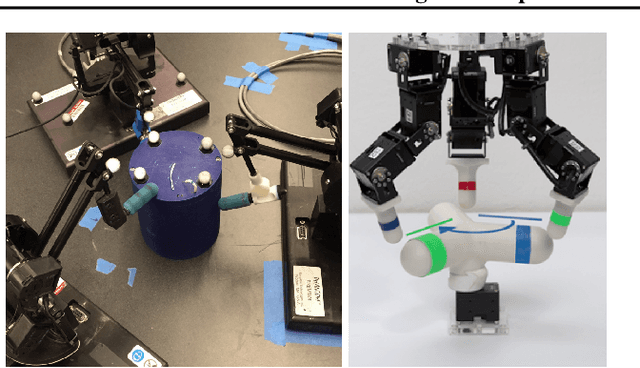
A Robot Cluster for Reproducible Research in Dexterous Manipulation
Sep 22, 2021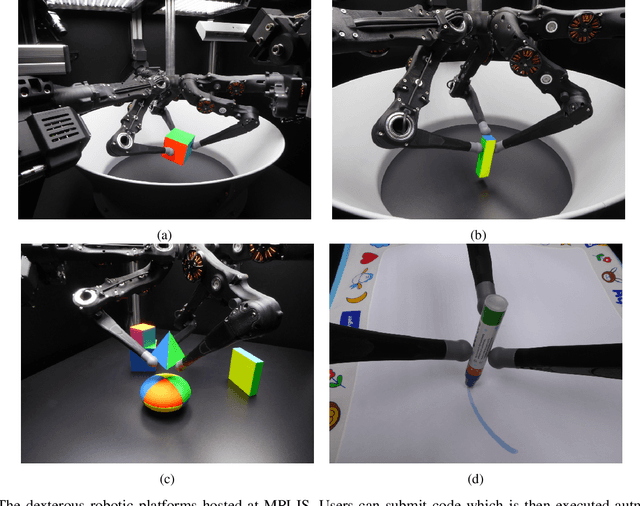
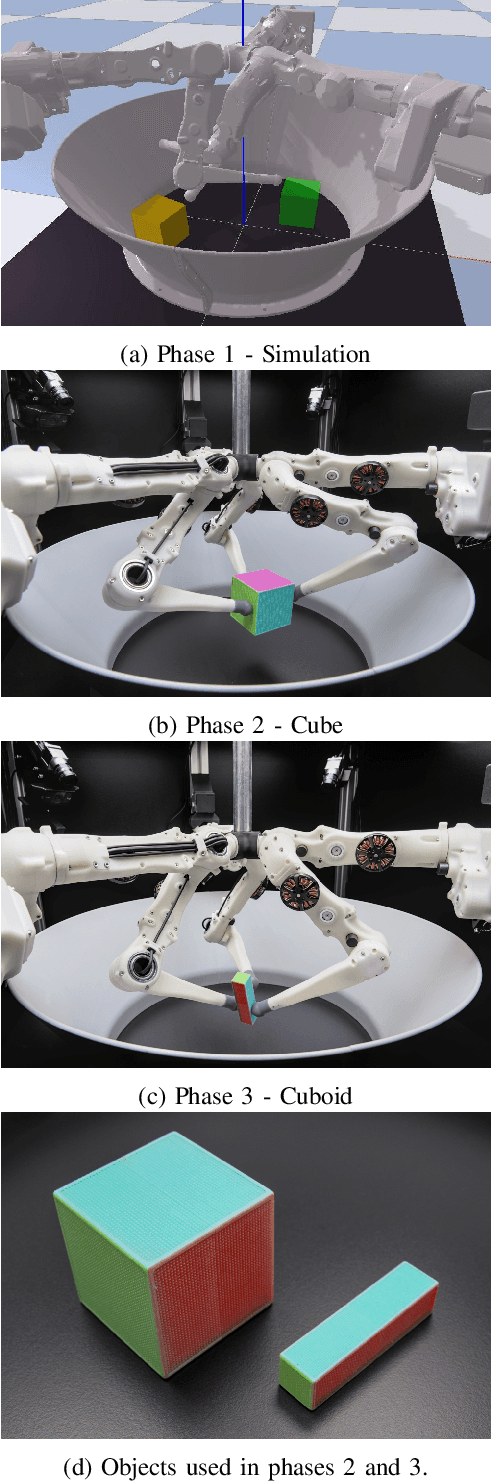
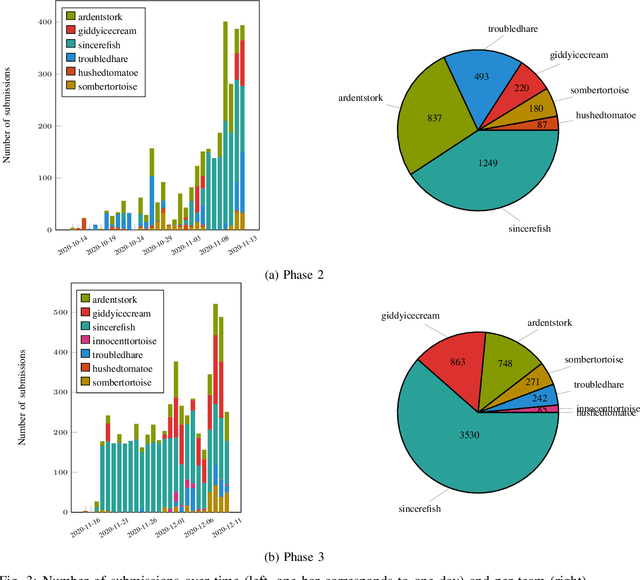
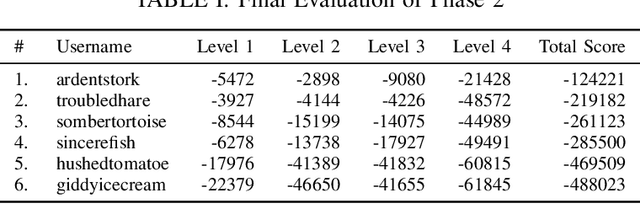
Dexterous manipulation remains an open problem in robotics. To coordinate efforts of the research community towards tackling this problem, we propose a shared benchmark. We designed and built robotic platforms that are hosted at the MPI-IS and can be accessed remotely. Each platform consists of three robotic fingers that are capable of dexterous object manipulation. Users are able to control the platforms remotely by submitting code that is executed automatically, akin to a computational cluster. Using this setup, i) we host robotics competitions, where teams from anywhere in the world access our platforms to tackle challenging tasks, ii) we publish the datasets collected during these competitions (consisting of hundreds of robot hours), and iii) we give researchers access to these platforms for their own projects.
Function Contrastive Learning of Transferable Representations
Oct 14, 2020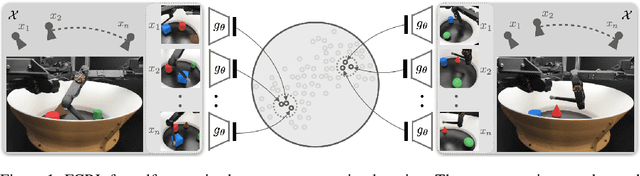
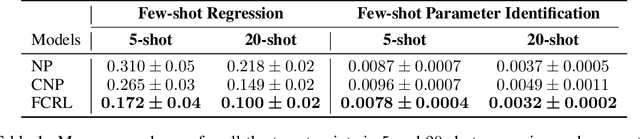
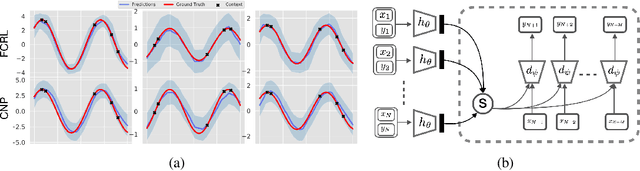
Few-shot-learning seeks to find models that are capable of fast-adaptation to novel tasks. Unlike typical few-shot learning algorithms, we propose a contrastive learning method which is not trained to solve a set of tasks, but rather attempts to find a good representation of the underlying data-generating processes (\emph{functions}). This allows for finding representations which are useful for an entire series of tasks sharing the same function. In particular, our training scheme is driven by the self-supervision signal indicating whether two sets of samples stem from the same underlying function. Our experiments on a number of synthetic and real-world datasets show that the representations we obtain can outperform strong baselines in terms of downstream performance and noise robustness, even when these baselines are trained in an end-to-end manner.
TriFinger: An Open-Source Robot for Learning Dexterity
Aug 08, 2020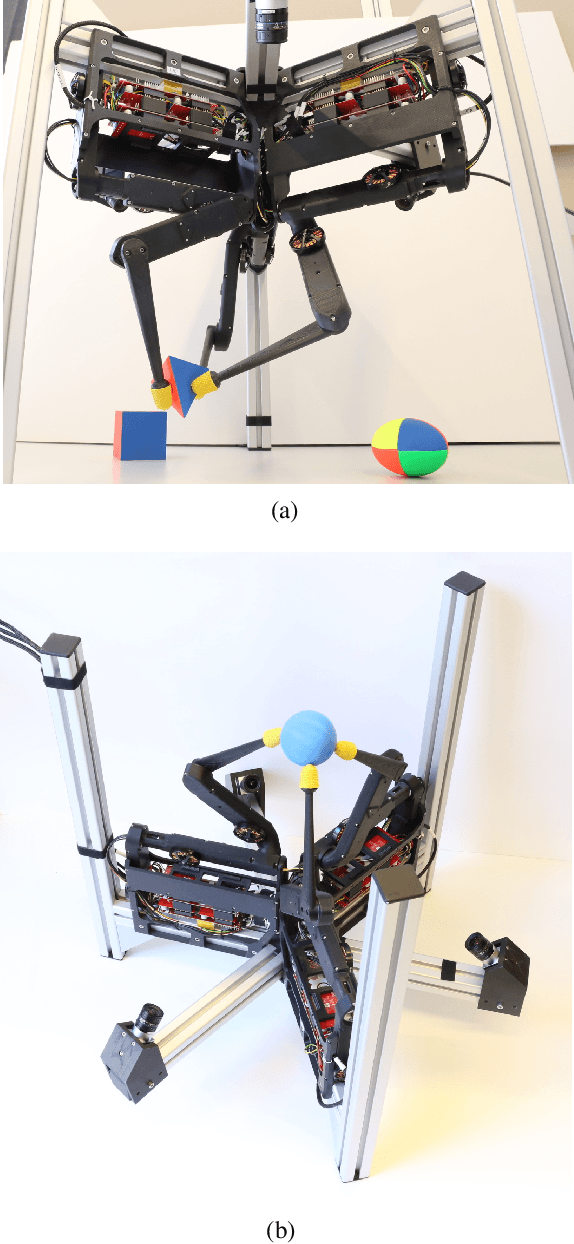
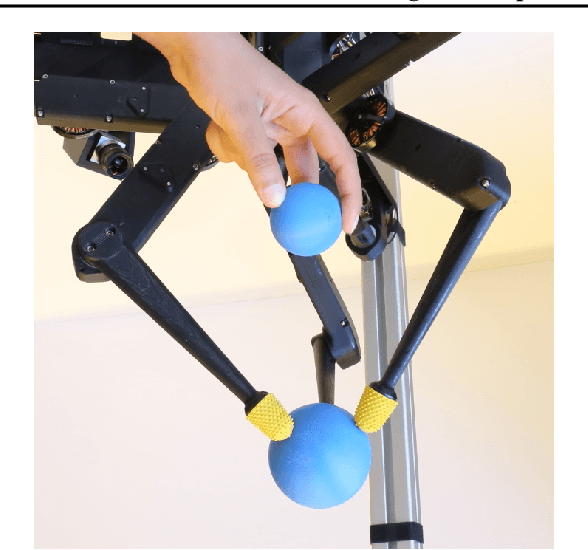
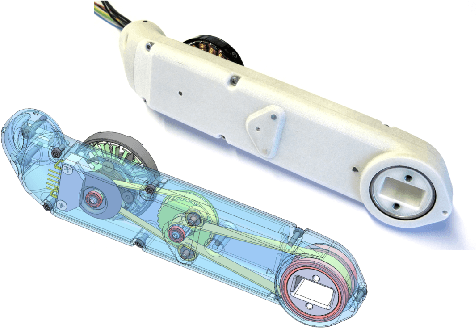
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. We argue that a hindrance is the high cost of experimentation on real systems, in terms of both time and money. We address this problem by proposing an open-source robotic platform which can safely operate without human supervision. The hardware is inexpensive (about \SI{5000}[\$]{}) yet highly dynamic, robust, and capable of complex interaction with external objects. The software operates at 1-kilohertz and performs safety checks to prevent the hardware from breaking. The easy-to-use front-end (in C++ and Python) is suitable for real-time control as well as deep reinforcement learning. In addition, the software framework is largely robot-agnostic and can hence be used independently of the hardware proposed herein. Finally, we illustrate the potential of the proposed platform through a number of experiments, including real-time optimal control, deep reinforcement learning from scratch, throwing, and writing.
Explanations for Temporal Recommendations
Jul 17, 2018
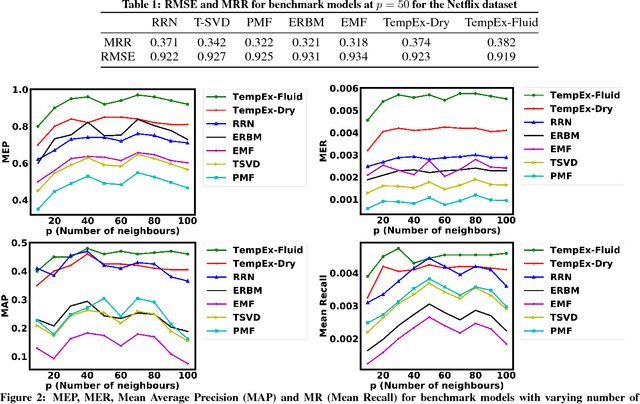
Recommendation systems are an integral part of Artificial Intelligence (AI) and have become increasingly important in the growing age of commercialization in AI. Deep learning (DL) techniques for recommendation systems (RS) provide powerful latent-feature models for effective recommendation but suffer from the major drawback of being non-interpretable. In this paper we describe a framework for explainable temporal recommendations in a DL model. We consider an LSTM based Recurrent Neural Network (RNN) architecture for recommendation and a neighbourhood-based scheme for generating explanations in the model. We demonstrate the effectiveness of our approach through experiments on the Netflix dataset by jointly optimizing for both prediction accuracy and explainability.
* Accepted at the XAI Workshop in IJCAI/ECAI 2018