 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Robot Cluster for Reproducible Research in Dexterous Manipulation
Sep 22, 2021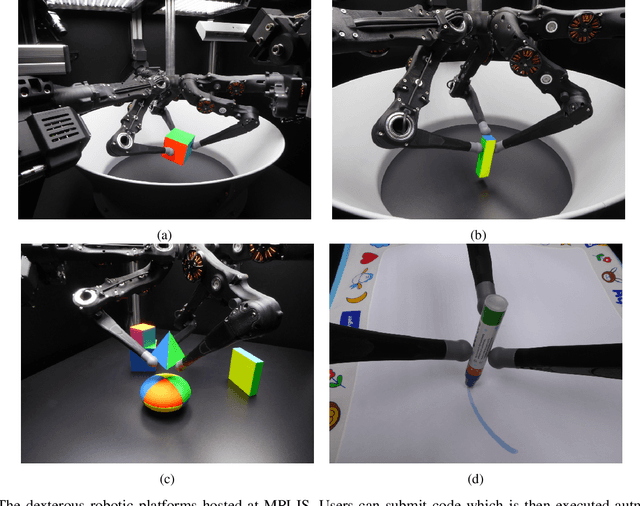
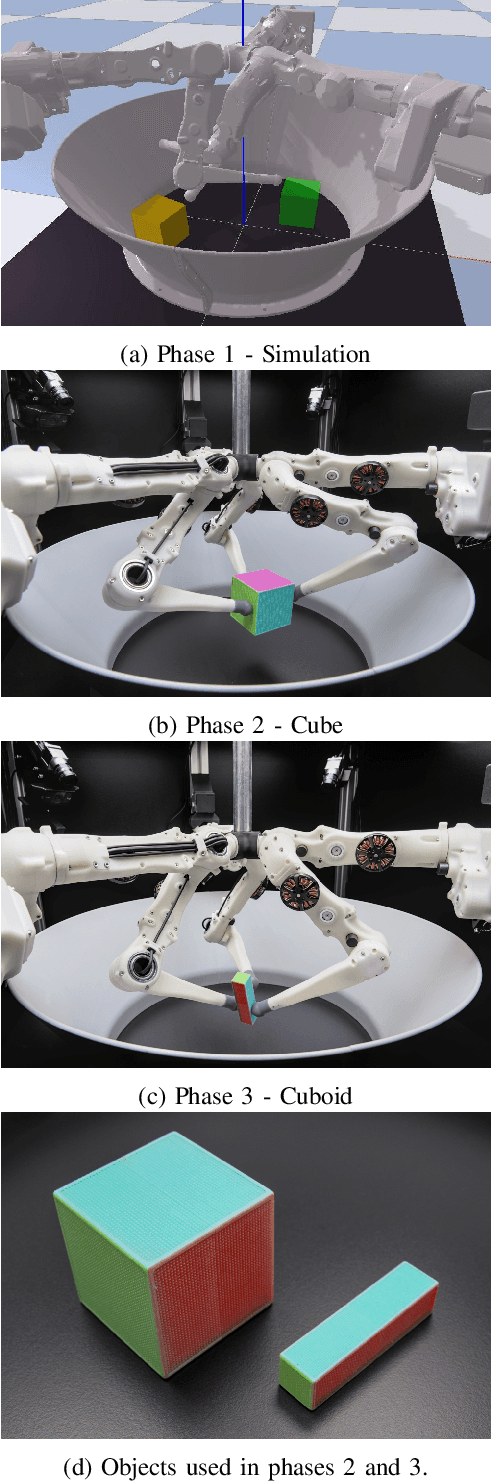
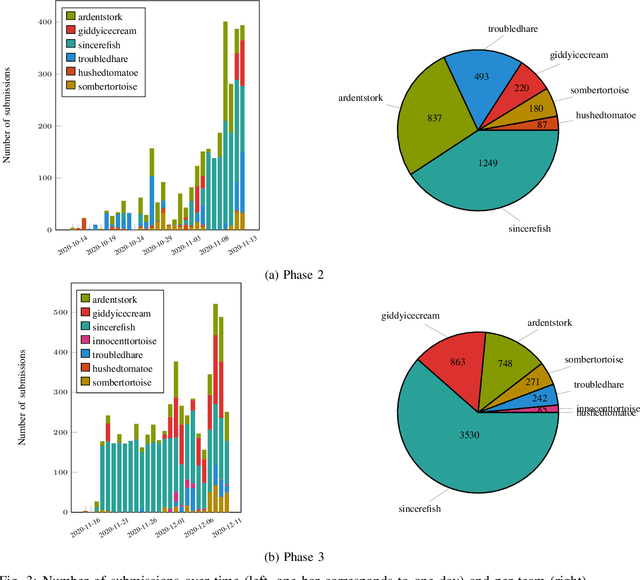
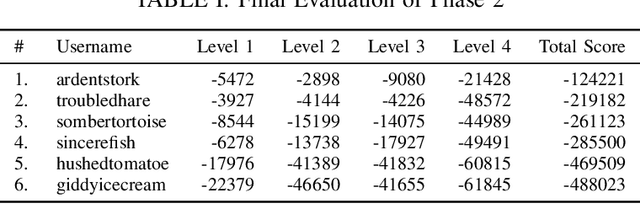
Dexterous manipulation remains an open problem in robotics. To coordinate efforts of the research community towards tackling this problem, we propose a shared benchmark. We designed and built robotic platforms that are hosted at the MPI-IS and can be accessed remotely. Each platform consists of three robotic fingers that are capable of dexterous object manipulation. Users are able to control the platforms remotely by submitting code that is executed automatically, akin to a computational cluster. Using this setup, i) we host robotics competitions, where teams from anywhere in the world access our platforms to tackle challenging tasks, ii) we publish the datasets collected during these competitions (consisting of hundreds of robot hours), and iii) we give researchers access to these platforms for their own projects.
TriFinger: An Open-Source Robot for Learning Dexterity
Aug 08, 2020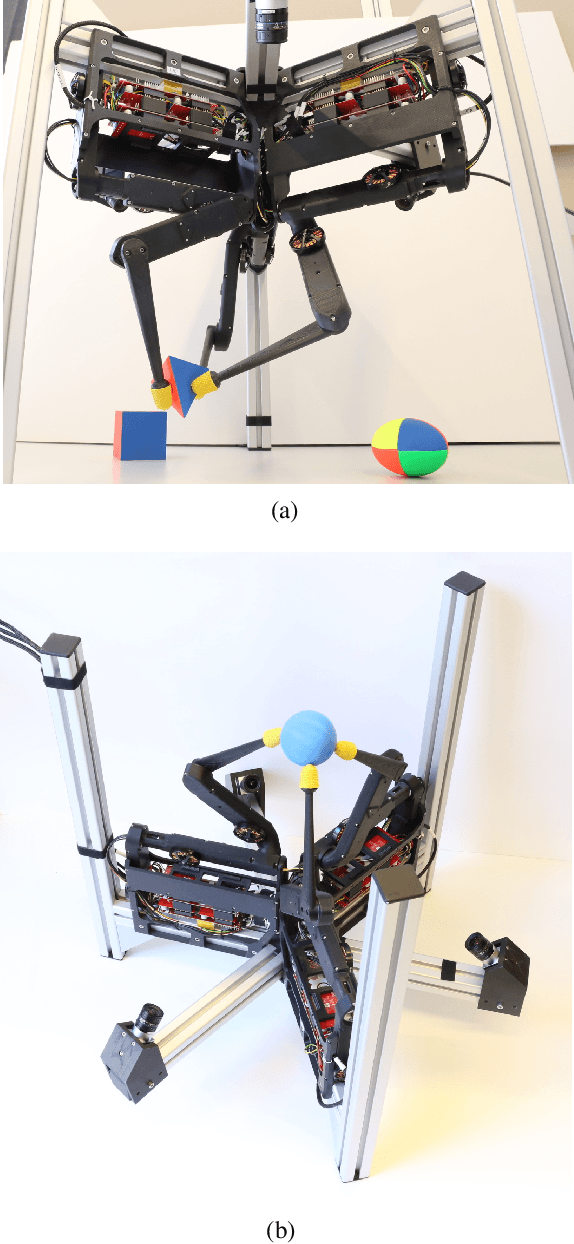
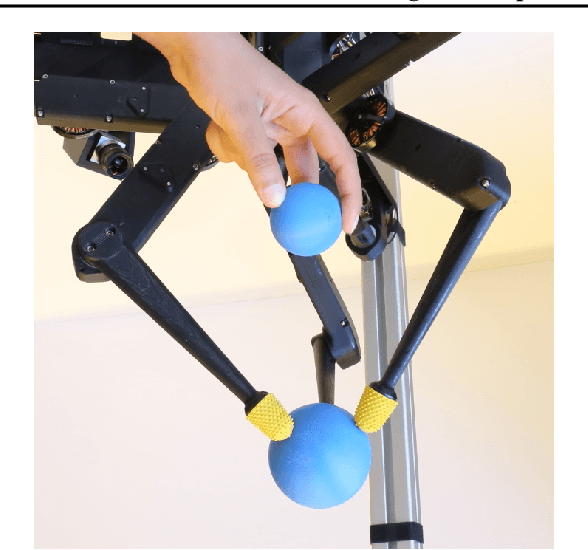
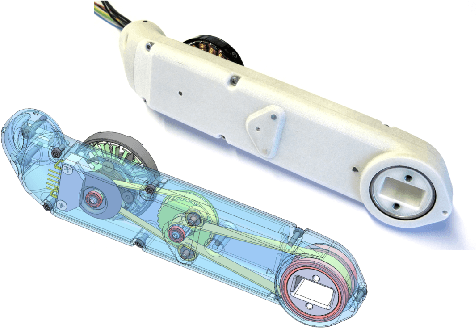
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. We argue that a hindrance is the high cost of experimentation on real systems, in terms of both time and money. We address this problem by proposing an open-source robotic platform which can safely operate without human supervision. The hardware is inexpensive (about \SI{5000}[\$]{}) yet highly dynamic, robust, and capable of complex interaction with external objects. The software operates at 1-kilohertz and performs safety checks to prevent the hardware from breaking. The easy-to-use front-end (in C++ and Python) is suitable for real-time control as well as deep reinforcement learning. In addition, the software framework is largely robot-agnostic and can hence be used independently of the hardware proposed herein. Finally, we illustrate the potential of the proposed platform through a number of experiments, including real-time optimal control, deep reinforcement learning from scratch, throwing, and writing.
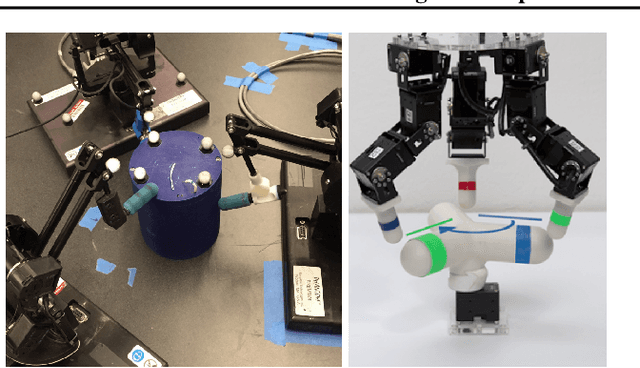
On the Transfer of Inductive Bias from Simulation to the Real World: a New Disentanglement Dataset
Jun 07, 2019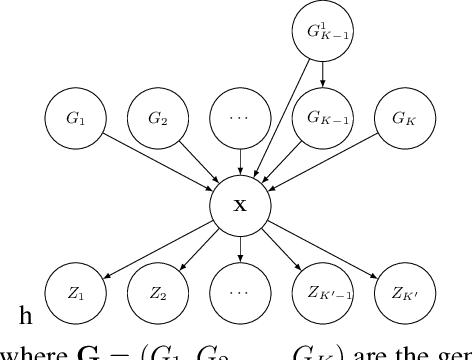
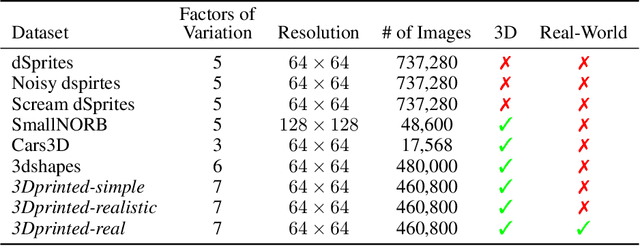
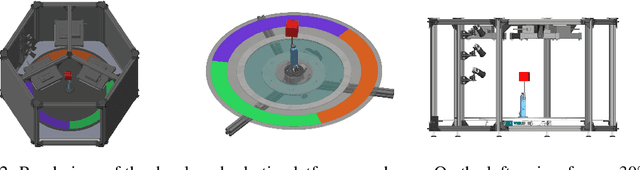
Learning meaningful and compact representations with structurally disentangled semantic aspects is considered to be of key importance in representation learning. Since real-world data is notoriously costly to collect, many recent state-of-the-art disentanglement models have heavily relied on synthetic toy data-sets. In this paper, we propose a novel data-set which consists of over 450'000 images of physical 3D objects with seven factors of variation, such as object color, shape, size and position. In order to be able to control all the factors of variation precisely, we built an experimental platform where the objects are being moved by a robotic arm. In addition, we provide two more datasets which consist of simulations of the experimental setup. These datasets provide for the first time the possibility to systematically investigate how well different disentanglement methods perform on real data in comparison to simulation, and how simulated data can be leveraged to build better representations of the real world.