 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMitigating exponential concentration in covariant quantum kernels for subspace and real-world data
Dec 10, 2024Fidelity quantum kernels have shown promise in classification tasks, particularly when a group structure in the data can be identified and exploited through a covariant feature map. In fact, there exist classification problems on which covariant kernels provide a provable advantage, thus establishing a separation between quantum and classical learners. However, their practical application poses two challenges: on one side, the group structure may be unknown and approximate in real-world data, and on the other side, scaling to the `utility' regime (above 100 qubits) is affected by exponential concentration. In this work, we address said challenges by applying fidelity kernels to real-world data with unknown structure, related to the scheduling of a fleet of electric vehicles, and to synthetic data generated from the union of subspaces, which is then close to many relevant real-world datasets. Furthermore, we propose a novel error mitigation strategy specifically tailored for fidelity kernels, called Bit Flip Tolerance (BFT), to alleviate the exponential concentration in our utility-scale experiments. Our multiclass classification reaches accuracies comparable to classical SVCs up to 156 qubits, thus constituting the largest experimental demonstration of quantum machine learning on IBM devices to date. For the real-world data experiments, the effect of the proposed BFT becomes manifest on 40+ qubits, where mitigated accuracies reach 80%, in line with classical, compared to 33% without BFT. Through the union-of-subspace synthetic dataset with 156 qubits, we demonstrate a mitigated accuracy of 80%, compared to 83% of classical models, and 37% of unmitigated quantum, using a test set of limited size.
Quantum Theory and Application of Contextual Optimal Transport
Feb 22, 2024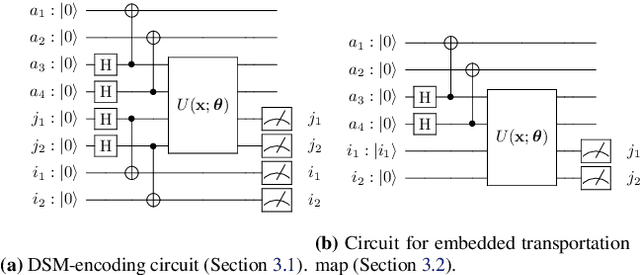
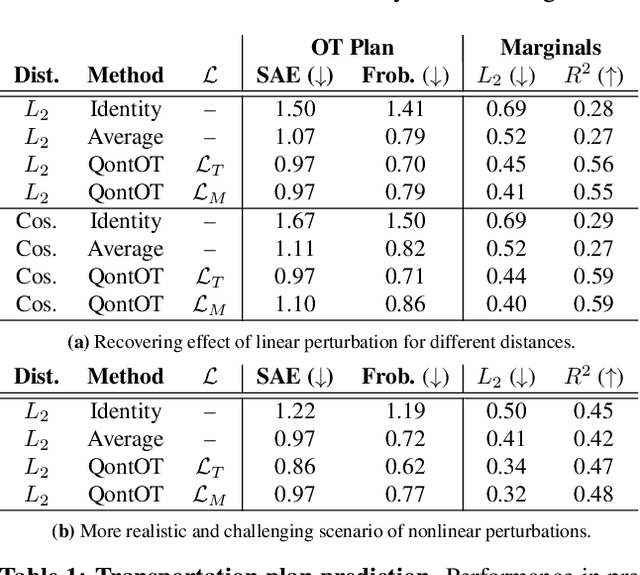
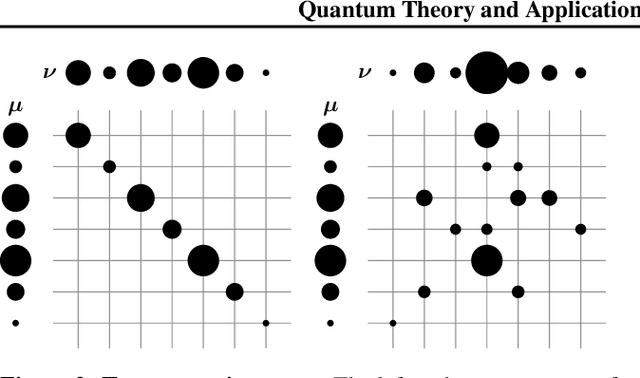
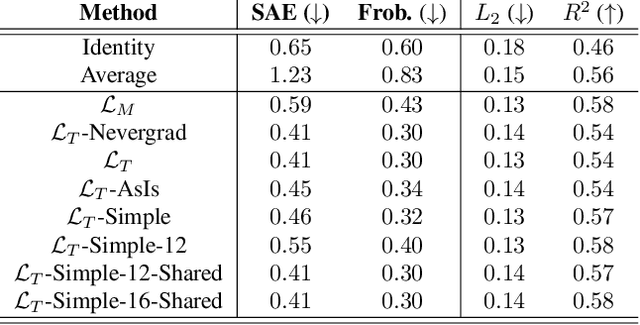
Optimal Transport (OT) has fueled machine learning (ML) applications across many domains. In cases where paired data measurements ($\mu$, $\nu$) are coupled to a context variable $p_i$ , one may aspire to learn a global transportation map that can be parameterized through a potentially unseen con-text. Existing approaches utilize Neural OT and largely rely on Brenier's theorem. Here, we propose a first-of-its-kind quantum computing formulation for amortized optimization of contextualized transportation plans. We exploit a direct link between doubly stochastic matrices and unitary operators thus finding a natural connection between OT and quantum computation. We verify our method on synthetic and real data, by predicting variations in cell type distributions parameterized through drug dosage as context. Our comparisons to several baselines reveal that our method can capture dose-induced variations in cell distributions, even to some extent when dosages are extrapolated and sometimes with performance similar to the best classical models. In summary, this is a first step toward learning to predict contextualized transportation plans through quantum.
Enabling the Evaluation of Driver Physiology Via Vehicle Dynamics
Sep 08, 2023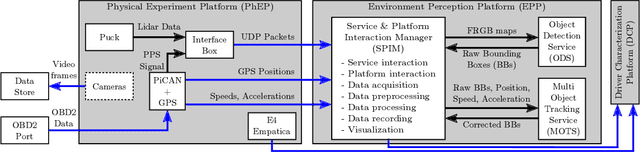
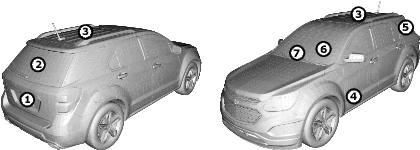
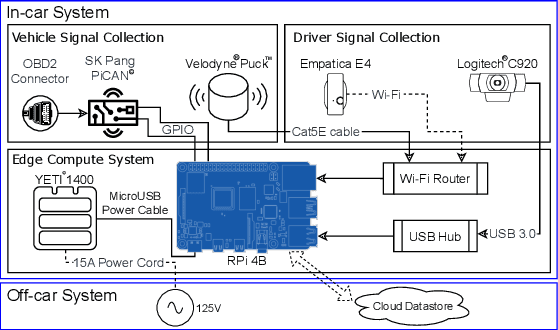
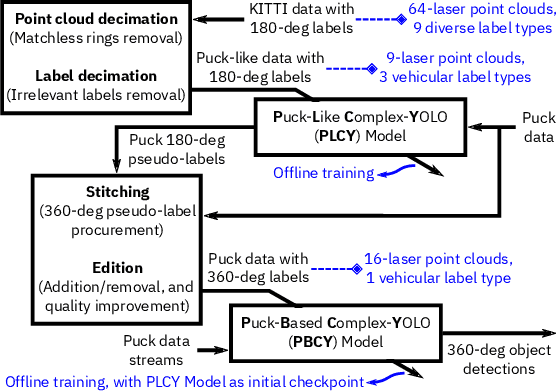
Driving is a daily routine for many individuals across the globe. This paper presents the configuration and methodologies used to transform a vehicle into a connected ecosystem capable of assessing driver physiology. We integrated an array of commercial sensors from the automotive and digital health sectors along with driver inputs from the vehicle itself. This amalgamation of sensors allows for meticulous recording of the external conditions and driving maneuvers. These data streams are processed to extract key parameters, providing insights into driver behavior in relation to their external environment and illuminating vital physiological responses. This innovative driver evaluation system holds the potential to amplify road safety. Moreover, when paired with data from conventional health settings, it may enhance early detection of health-related complications.
* 7 pages, 11 figures, 2023 IEEE International Conference on Digital Health (ICDH)
A recommender for the management of chronic pain in patients undergoing spinal cord stimulation
Sep 06, 2023



Spinal cord stimulation (SCS) is a therapeutic approach used for the management of chronic pain. It involves the delivery of electrical impulses to the spinal cord via an implanted device, which when given suitable stimulus parameters can mask or block pain signals. Selection of optimal stimulation parameters usually happens in the clinic under the care of a provider whereas at-home SCS optimization is managed by the patient. In this paper, we propose a recommender system for the management of pain in chronic pain patients undergoing SCS. In particular, we use a contextual multi-armed bandit (CMAB) approach to develop a system that recommends SCS settings to patients with the aim of improving their condition. These recommendations, sent directly to patients though a digital health ecosystem, combined with a patient monitoring system closes the therapeutic loop around a chronic pain patient over their entire patient journey. We evaluated the system in a cohort of SCS-implanted ENVISION study subjects (Clinicaltrials.gov ID: NCT03240588) using a combination of quality of life metrics and Patient States (PS), a novel measure of holistic outcomes. SCS recommendations provided statistically significant improvement in clinical outcomes (pain and/or QoL) in 85\% of all subjects (N=21). Among subjects in moderate PS (N=7) prior to receiving recommendations, 100\% showed statistically significant improvements and 5/7 had improved PS dwell time. This analysis suggests SCS patients may benefit from SCS recommendations, resulting in additional clinical improvement on top of benefits already received from SCS therapy.
Super Resolution for Turbulent Flows in 2D: Stabilized Physics Informed Neural Networks
Apr 15, 2022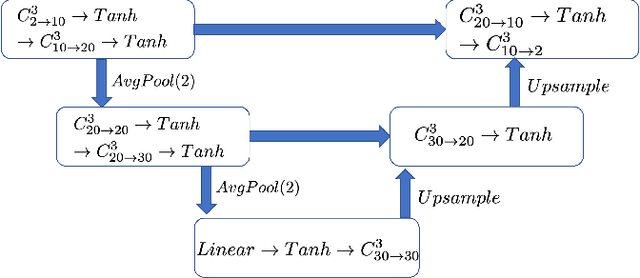

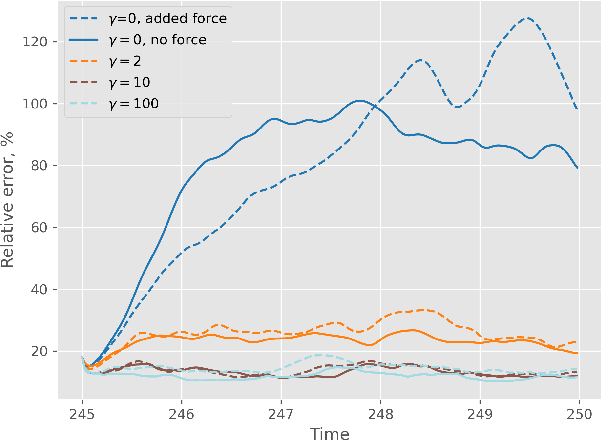

We propose a new design of a neural network for solving a zero shot super resolution problem for turbulent flows. We embed Luenberger-type observer into the network's architecture to inform the network of the physics of the process, and to provide error correction and stabilization mechanisms. In addition, to compensate for decrease of observer's performance due to the presence of unknown destabilizing forcing, the network is designed to estimate the contribution of the unknown forcing implicitly from the data over the course of training. By running a set of numerical experiments, we demonstrate that the proposed network does recover unknown forcing from data and is capable of predicting turbulent flows in high resolution from low resolution noisy observations.
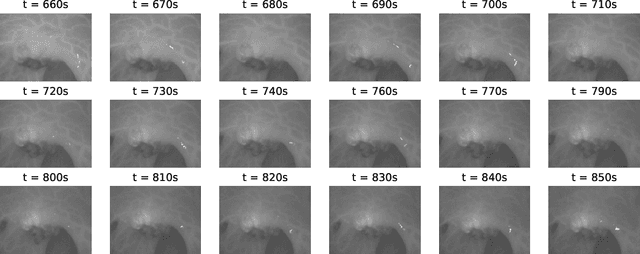
A Real-Time Region Tracking Algorithm Tailored to Endoscopic Video with Open-Source Implementation
Mar 16, 2022
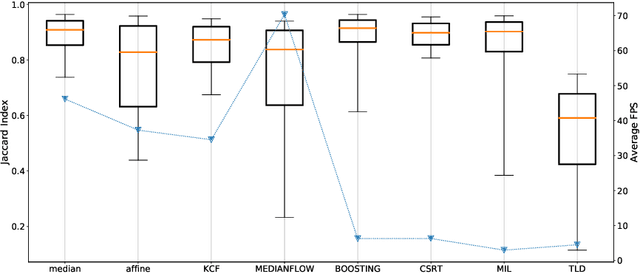
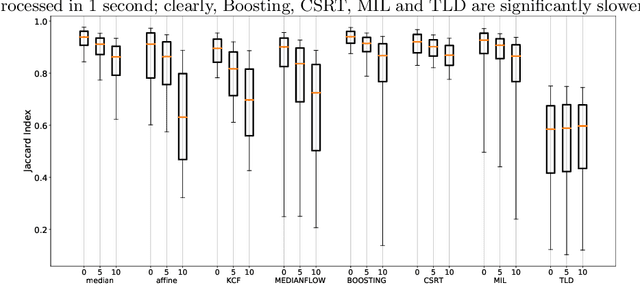
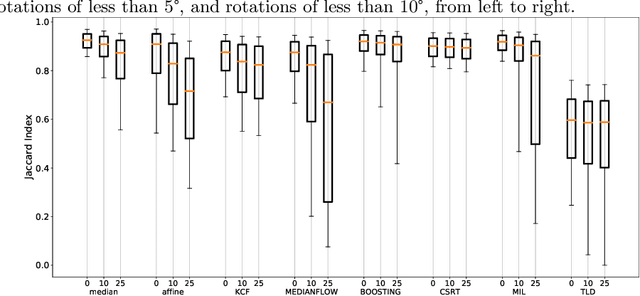
With a video data source, such as multispectral video acquired during administration of fluorescent tracers, extraction of time-resolved data typically requires the compensation of motion. While this can be done manually, which is arduous, or using off-the-shelf object tracking software, which often yields unsatisfactory performance, we present an algorithm which is simple and performant. Most importantly, we provide an open-source implementation, with an easy-to-use interface for researchers not inclined to write their own code, as well as Python modules that can be used programmatically.
Reinforcement Learning with Algorithms from Probabilistic Structure Estimation
Mar 15, 2021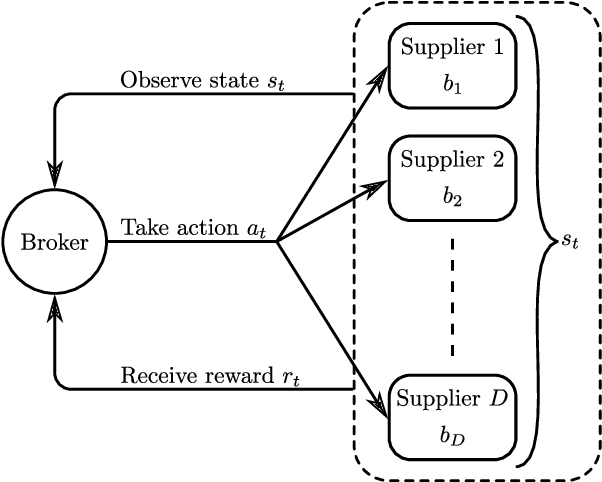
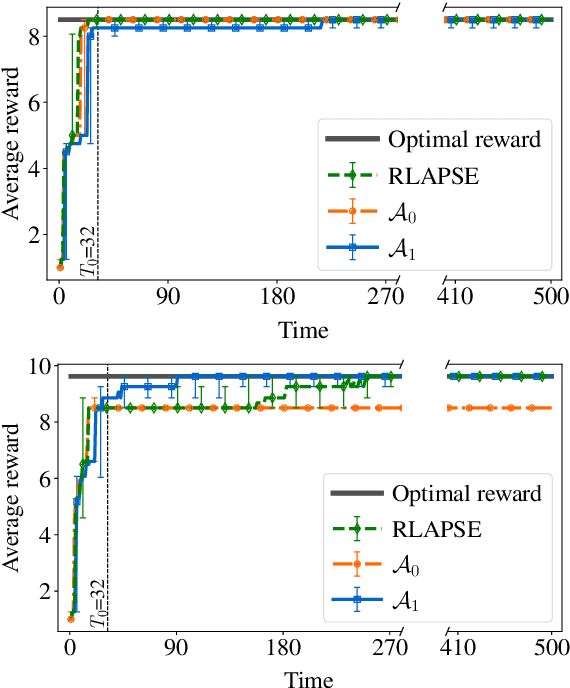
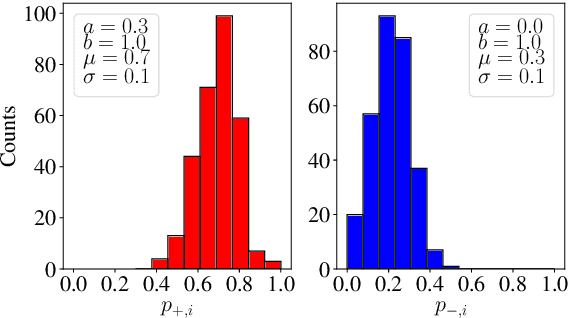
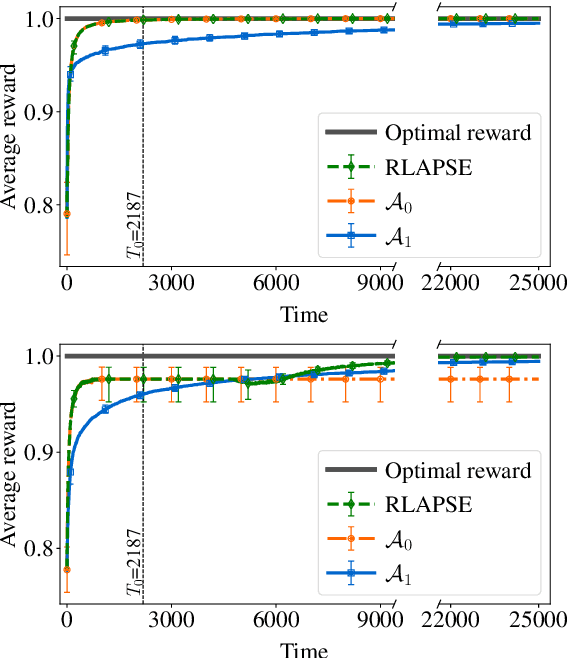
Reinforcement learning (RL) algorithms aim to learn optimal decisions in unknown environments through experience of taking actions and observing the rewards gained. In some cases, the environment is not influenced by the actions of the RL agent, in which case the problem can be modeled as a contextual multi-armed bandit and lightweight \emph{myopic} algorithms can be employed. On the other hand, when the RL agent's actions affect the environment, the problem must be modeled as a Markov decision process and more complex RL algorithms are required which take the future effects of actions into account. Moreover, in many modern RL settings, it is unknown from the outset whether or not the agent's actions will impact the environment and it is often not possible to determine which RL algorithm is most fitting. In this work, we propose to avoid this dilemma entirely and incorporate a choice mechanism into our RL framework. Rather than assuming a specific problem structure, we use a probabilistic structure estimation procedure based on a likelihood-ratio (LR) test to make a more informed selection of learning algorithm. We derive a sufficient condition under which myopic policies are optimal, present an LR test for this condition, and derive a bound on the regret of our framework. We provide examples of real-world scenarios where our framework is needed and provide extensive simulations to validate our approach.
Perfusion Quantification from Endoscopic Videos: Learning to Read Tumor Signatures
Jun 25, 2020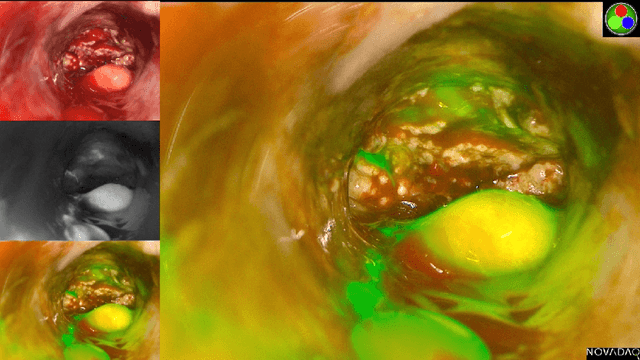
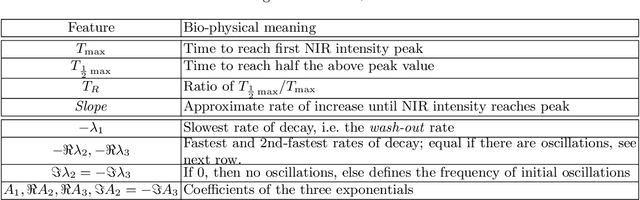
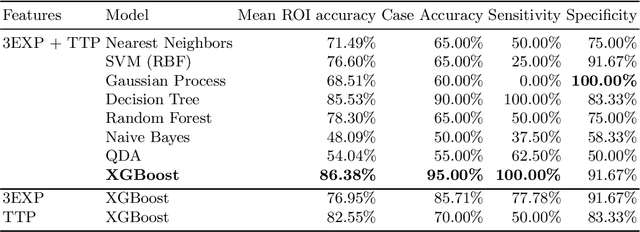
Intra-operative identification of malignant versus benign or healthy tissue is a major challenge in fluorescence guided cancer surgery. We propose a perfusion quantification method for computer-aided interpretation of subtle differences in dynamic perfusion patterns which can be used to distinguish between normal tissue and benign or malignant tumors intra-operatively in real-time by using multispectral endoscopic videos. The method exploits the fact that vasculature arising from cancer angiogenesis gives tumors differing perfusion patterns from the surrounding tissue, and defines a signature of tumor which could be used to differentiate tumors from normal tissues. Experimental evaluation of our method on a cohort of colorectal cancer surgery endoscopic videos suggests that the proposed tumor signature is able to successfully discriminate between healthy, cancerous and benign tissue with 95% accuracy.
Bayesian Classifier for Route Prediction with Markov Chains
Aug 31, 2018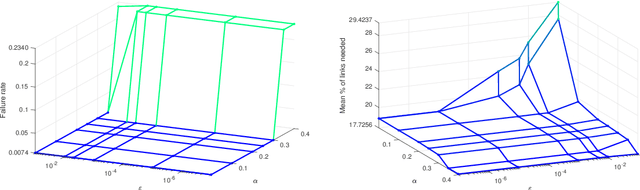
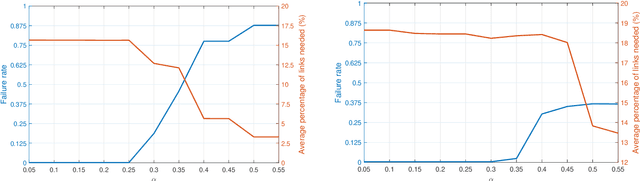
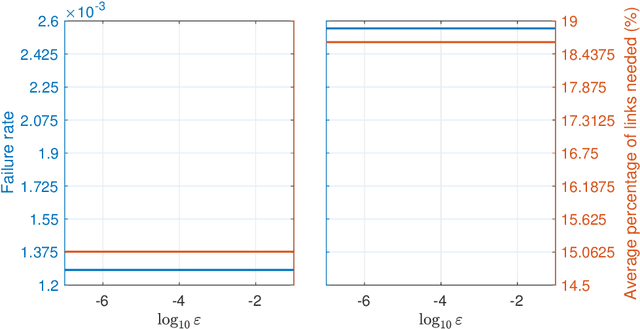
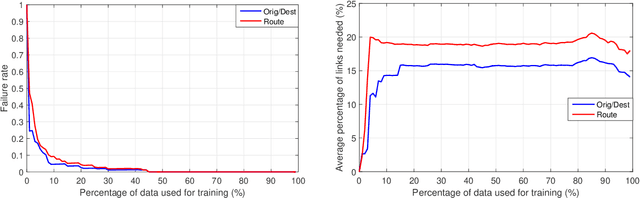
We present here a general framework and a specific algorithm for predicting the destination, route, or more generally a pattern, of an ongoing journey, building on the recent work of [Y. Lassoued, J. Monteil, Y. Gu, G. Russo, R. Shorten, and M. Mevissen, "Hidden Markov model for route and destination prediction," in IEEE International Conference on Intelligent Transportation Systems, 2017]. In the presented framework, known journey patterns are modelled as stochastic processes, emitting the road segments visited during the journey, and the ongoing journey is predicted by updating the posterior probability of each journey pattern given the road segments visited so far. In this contribution, we use Markov chains as models for the journey patterns, and consider the prediction as final, once one of the posterior probabilities crosses a predefined threshold. Despite the simplicity of both, examples run on a synthetic dataset demonstrate high accuracy of the made predictions.
Where computer vision can aid physics: dynamic cloud motion forecasting from satellite images
Sep 30, 2017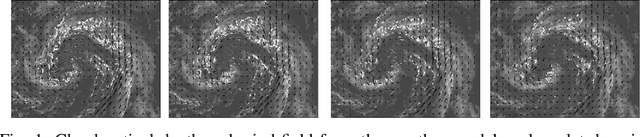
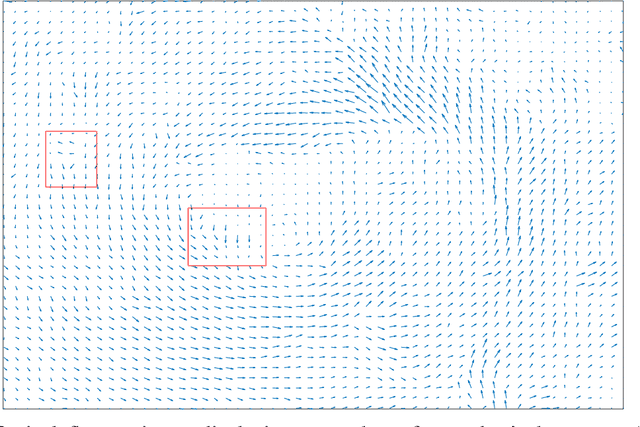
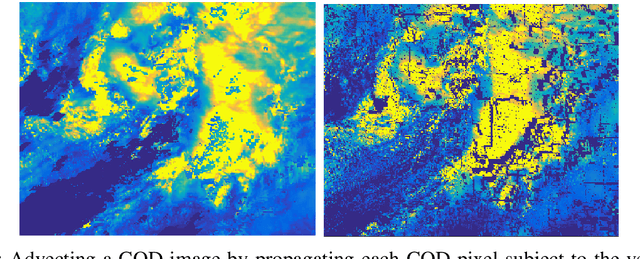
This paper describes a new algorithm for solar energy forecasting from a sequence of Cloud Optical Depth (COD) images. The algorithm is based on the following simple observation: the dynamics of clouds represented by COD images resembles the motion (transport) of a density in a fluid flow. This suggests that, to forecast the motion of COD images, it is sufficient to forecast the flow. The latter, in turn, can be accomplished by fitting a parametric model of the fluid flow to the COD images observed in the past. Namely, the learning phase of the algorithm is composed of the following steps: (i) given a sequence of COD images, the snapshots of the optical flow are estimated from two consecutive COD images; (ii) these snapshots are then assimilated into a Navier-Stokes Equation (NSE), i.e. an initial velocity field for NSE is selected so that the corresponding NSE' solution is as close as possible to the optical flow snapshots. The prediction phase consists of utilizing a linear transport equation, which describes the propagation of COD images in the fluid flow predicted by NSE, to estimate the future motion of the COD images. The algorithm has been tested on COD images provided by two geostationary operational environmental satellites from NOAA serving the west-hemisphere.