 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Learning Protocol for Federated Tumor Segmentation Challenge
Dec 16, 2022In this work, we devise robust and efficient learning protocols for orchestrating a Federated Learning (FL) process for the Federated Tumor Segmentation Challenge (FeTS 2022). Enabling FL for FeTS setup is challenging mainly due to data heterogeneity among collaborators and communication cost of training. To tackle these challenges, we propose Robust Learning Protocol (RoLePRO) which is a combination of server-side adaptive optimisation (e.g., server-side Adam) and judicious parameter (weights) aggregation schemes (e.g., adaptive weighted aggregation). RoLePRO takes a two-phase approach, where the first phase consists of vanilla Federated Averaging, while the second phase consists of a judicious aggregation scheme that uses a sophisticated reweighting, all in the presence of an adaptive optimisation algorithm at the server. We draw insights from extensive experimentation to tune learning rates for the two phases.
Extracting, Visualizing, and Learning from Dynamic Data: Perfusion in Surgical Video for Tissue Characterization
Nov 09, 2022

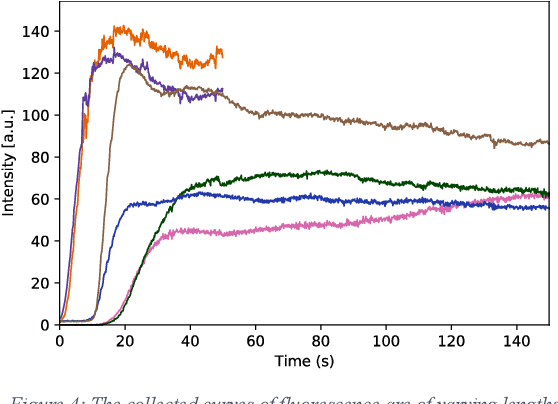
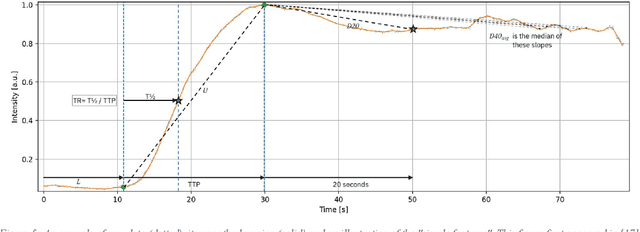
Intraoperative assessment of tissue can be guided through fluorescence imaging which involves systemic dosing with a fluorophore and subsequent examination of the tissue region of interest with a near-infrared camera. This typically involves administering indocyanine green (ICG) hours or even days before surgery and intraoperative visualization at the time predicted for steady-state signal-to-background status. Here, we describe our efforts to capture and utilize the information contained in the first few minutes after ICG administration from the perspective of both signal processing and surgical practice. We prove a method for characterization of cancerous versus benign rectal lesions now undergoing further development and validation via multicenter clinical phase studies.
* Presented and published at IEEE International Conference on Digital Health (ICDH) 2022
A Real-Time Region Tracking Algorithm Tailored to Endoscopic Video with Open-Source Implementation
Mar 16, 2022
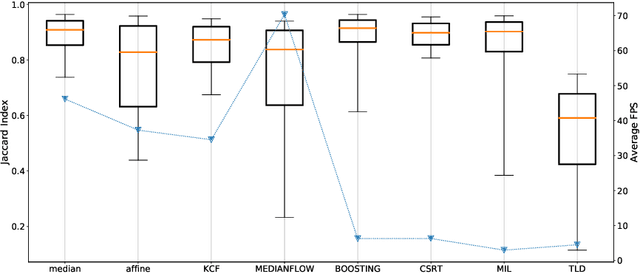
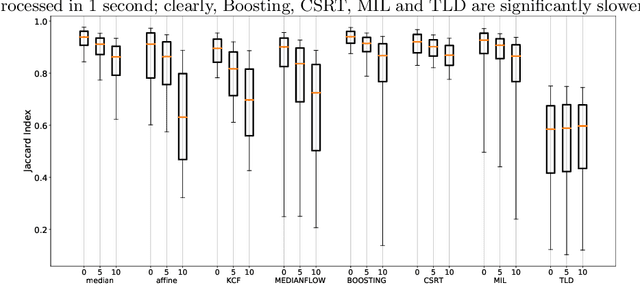
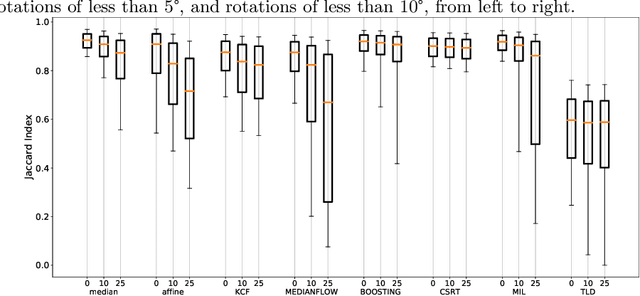
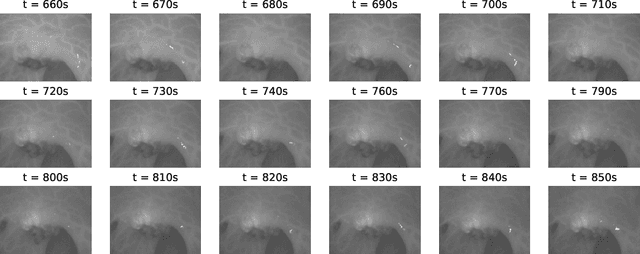
With a video data source, such as multispectral video acquired during administration of fluorescent tracers, extraction of time-resolved data typically requires the compensation of motion. While this can be done manually, which is arduous, or using off-the-shelf object tracking software, which often yields unsatisfactory performance, we present an algorithm which is simple and performant. Most importantly, we provide an open-source implementation, with an easy-to-use interface for researchers not inclined to write their own code, as well as Python modules that can be used programmatically.
Reinforcement Learning with Algorithms from Probabilistic Structure Estimation
Mar 15, 2021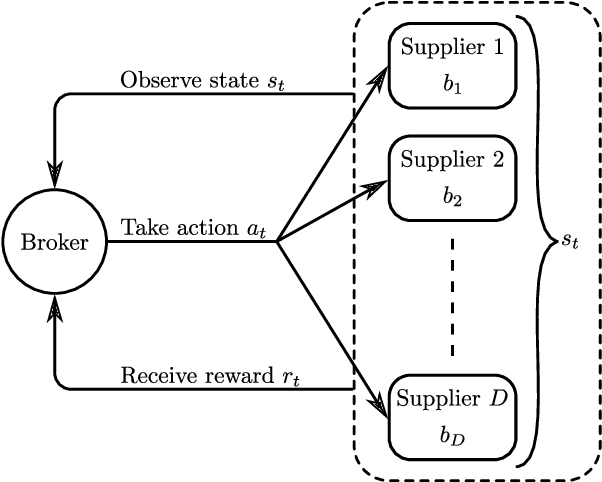
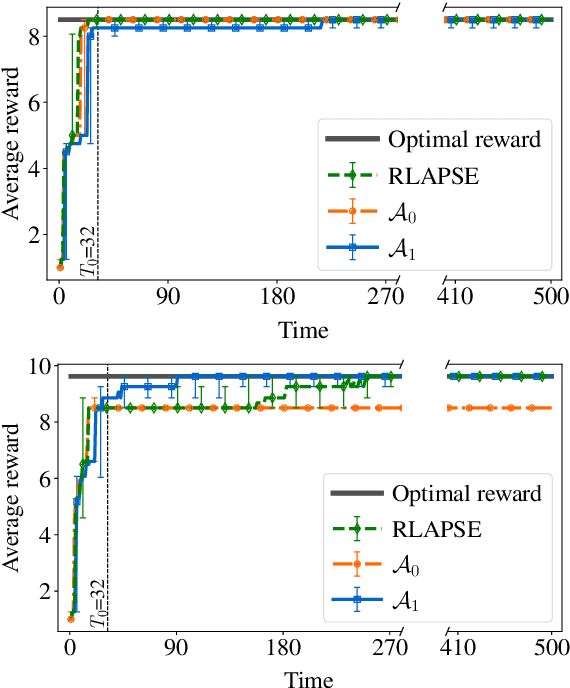
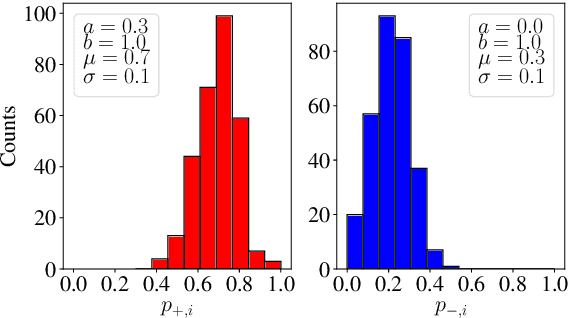
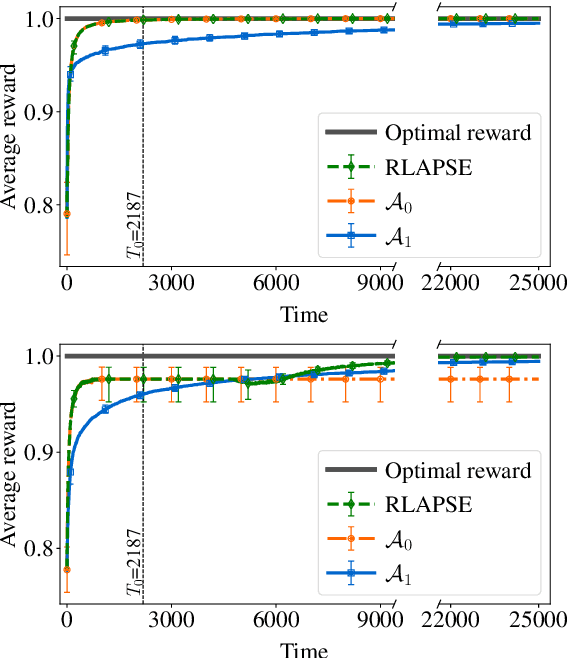
Reinforcement learning (RL) algorithms aim to learn optimal decisions in unknown environments through experience of taking actions and observing the rewards gained. In some cases, the environment is not influenced by the actions of the RL agent, in which case the problem can be modeled as a contextual multi-armed bandit and lightweight \emph{myopic} algorithms can be employed. On the other hand, when the RL agent's actions affect the environment, the problem must be modeled as a Markov decision process and more complex RL algorithms are required which take the future effects of actions into account. Moreover, in many modern RL settings, it is unknown from the outset whether or not the agent's actions will impact the environment and it is often not possible to determine which RL algorithm is most fitting. In this work, we propose to avoid this dilemma entirely and incorporate a choice mechanism into our RL framework. Rather than assuming a specific problem structure, we use a probabilistic structure estimation procedure based on a likelihood-ratio (LR) test to make a more informed selection of learning algorithm. We derive a sufficient condition under which myopic policies are optimal, present an LR test for this condition, and derive a bound on the regret of our framework. We provide examples of real-world scenarios where our framework is needed and provide extensive simulations to validate our approach.
Perfusion Quantification from Endoscopic Videos: Learning to Read Tumor Signatures
Jun 25, 2020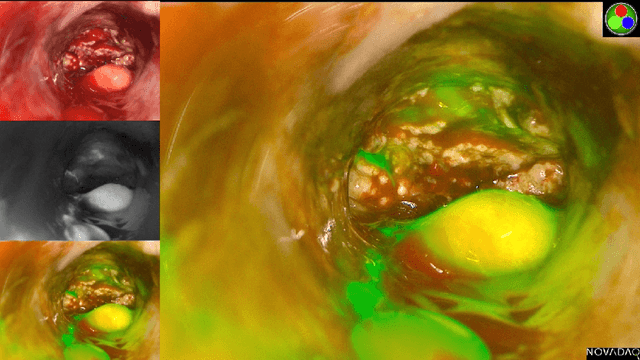
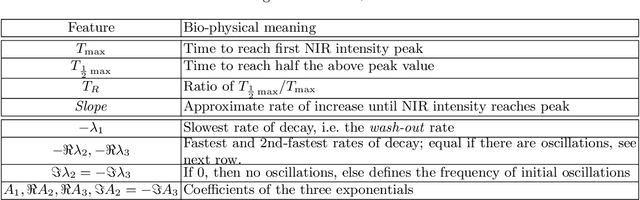
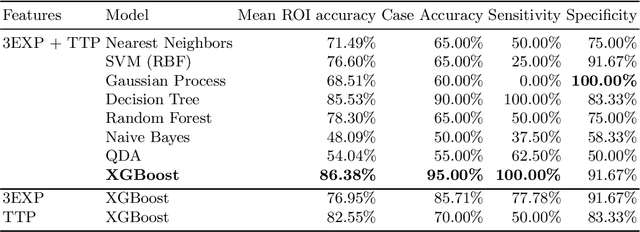
Intra-operative identification of malignant versus benign or healthy tissue is a major challenge in fluorescence guided cancer surgery. We propose a perfusion quantification method for computer-aided interpretation of subtle differences in dynamic perfusion patterns which can be used to distinguish between normal tissue and benign or malignant tumors intra-operatively in real-time by using multispectral endoscopic videos. The method exploits the fact that vasculature arising from cancer angiogenesis gives tumors differing perfusion patterns from the surrounding tissue, and defines a signature of tumor which could be used to differentiate tumors from normal tissues. Experimental evaluation of our method on a cohort of colorectal cancer surgery endoscopic videos suggests that the proposed tumor signature is able to successfully discriminate between healthy, cancerous and benign tissue with 95% accuracy.
Bayesian Classifier for Route Prediction with Markov Chains
Aug 31, 2018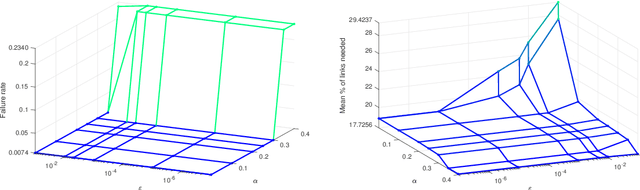
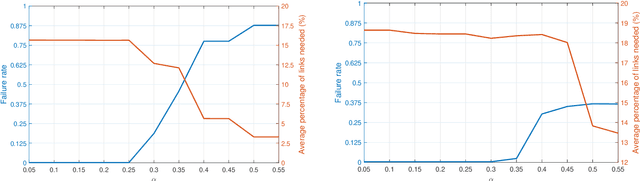
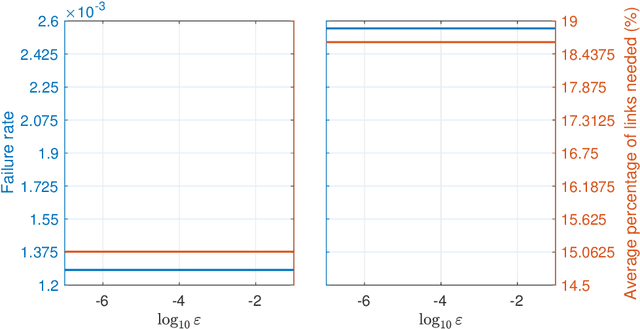
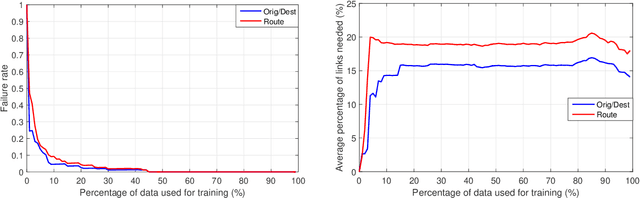
We present here a general framework and a specific algorithm for predicting the destination, route, or more generally a pattern, of an ongoing journey, building on the recent work of [Y. Lassoued, J. Monteil, Y. Gu, G. Russo, R. Shorten, and M. Mevissen, "Hidden Markov model for route and destination prediction," in IEEE International Conference on Intelligent Transportation Systems, 2017]. In the presented framework, known journey patterns are modelled as stochastic processes, emitting the road segments visited during the journey, and the ongoing journey is predicted by updating the posterior probability of each journey pattern given the road segments visited so far. In this contribution, we use Markov chains as models for the journey patterns, and consider the prediction as final, once one of the posterior probabilities crosses a predefined threshold. Despite the simplicity of both, examples run on a synthetic dataset demonstrate high accuracy of the made predictions.