 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Design and Implementation of an Open-source Emulation Platform for User-Centric Shared E-mobility Services
Mar 12, 2024In response to the escalating global challenge of increasing emissions and pollution in transportation, shared electric mobility services, encompassing e-cars, e-bikes, and e-scooters, have emerged as a popular strategy. However, existingshared electric mobility services exhibit critical design deficiencies, including insufficient service integration, imprecise energy consumption forecasting, limited scalability and geographical coverage, and a notable absence of a user-centric perspective, particularly in the context of multi-modal transportation. More importantly, there is no consolidated open-source framework which could benefit the e-mobility research community. This paper aims to bridge this gap by providing a pioneering open-source framework for shared e-mobility. The proposed framework, with an agent-in-the-loop approach and modular architecture, is tailored to diverse user preferences and offers enhanced customization. We demonstrate the viability of this framework by solving an integrated multi-modal route-optimization problem using the modified Ant Colony Optimization (ACO) algorithm. The primary contribution of this work is to provide a collaborative and transparent framework to tackle the dynamic challenges in the field of e-mobility research using a consolidated approach.
Predicting Injectable Medication Adherence via a Smart Sharps Bin and Machine Learning
Apr 02, 2020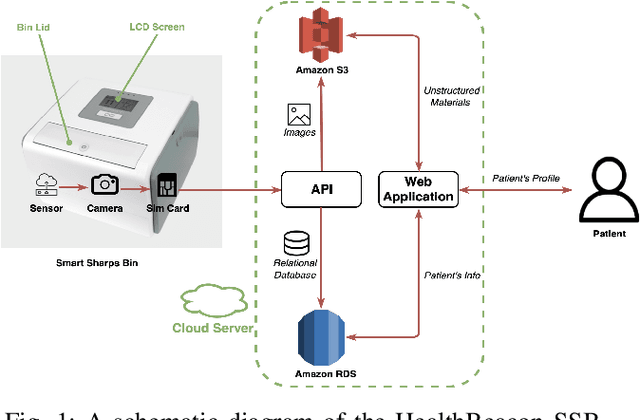
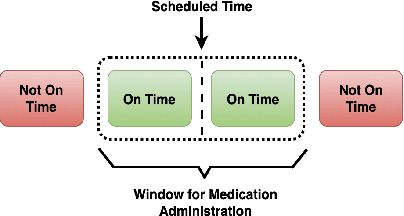
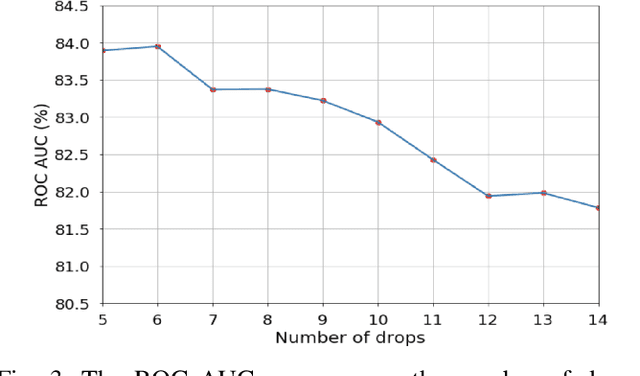
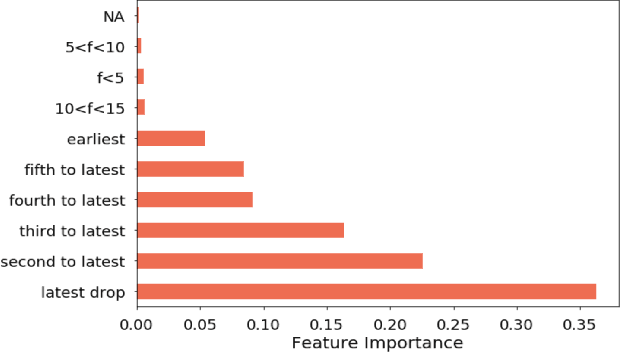
Medication non-adherence is a widespread problem affecting over 50% of people who have chronic illness and need chronic treatment. Non-adherence exacerbates health risks and drives significant increases in treatment costs. In order to address these challenges, the importance of predicting patients' adherence has been recognised. In other words, it is important to improve the efficiency of interventions of the current healthcare system by prioritizing resources to the patients who are most likely to be non-adherent. Our objective in this work is to make predictions regarding individual patients' behaviour in terms of taking their medication on time during their next scheduled medication opportunity. We do this by leveraging a number of machine learning models. In particular, we demonstrate the use of a connected IoT device; a "Smart Sharps Bin", invented by HealthBeacon Ltd.; to monitor and track injection disposal of patients in their home environment. Using extensive data collected from these devices, five machine learning models, namely Extra Trees Classifier, Random Forest, XGBoost, Gradient Boosting and Multilayer Perception were trained and evaluated on a large dataset comprising 165,223 historic injection disposal records collected from 5,915 HealthBeacon units over the course of 3 years. The testing work was conducted on real-time data generated by the smart device over a time period after the model training was complete, i.e. true future data. The proposed machine learning approach demonstrated very good predictive performance exhibiting an Area Under the Receiver Operating Characteristic Curve (ROC AUC) of 0.86.
Bayesian Classifier for Route Prediction with Markov Chains
Aug 31, 2018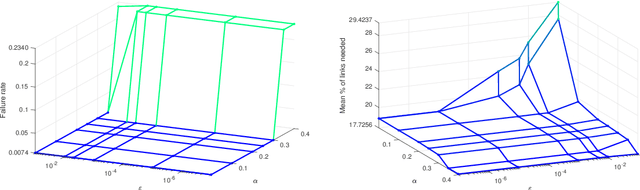
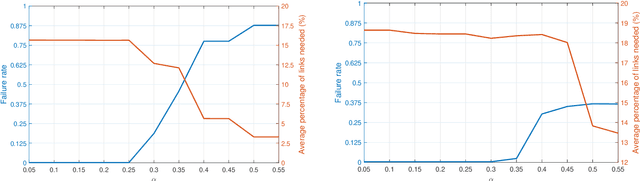
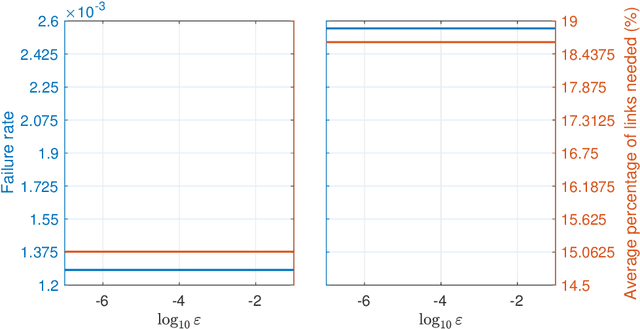
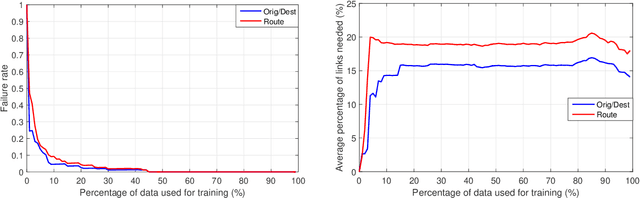
We present here a general framework and a specific algorithm for predicting the destination, route, or more generally a pattern, of an ongoing journey, building on the recent work of [Y. Lassoued, J. Monteil, Y. Gu, G. Russo, R. Shorten, and M. Mevissen, "Hidden Markov model for route and destination prediction," in IEEE International Conference on Intelligent Transportation Systems, 2017]. In the presented framework, known journey patterns are modelled as stochastic processes, emitting the road segments visited during the journey, and the ongoing journey is predicted by updating the posterior probability of each journey pattern given the road segments visited so far. In this contribution, we use Markov chains as models for the journey patterns, and consider the prediction as final, once one of the posterior probabilities crosses a predefined threshold. Despite the simplicity of both, examples run on a synthetic dataset demonstrate high accuracy of the made predictions.