 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeData-driven Energy Consumption Modelling for Electric Micromobility using an Open Dataset
Mar 26, 2024



The escalating challenges of traffic congestion and environmental degradation underscore the critical importance of embracing E-Mobility solutions in urban spaces. In particular, micro E-Mobility tools such as E-scooters and E-bikes, play a pivotal role in this transition, offering sustainable alternatives for urban commuters. However, the energy consumption patterns for these tools are a critical aspect that impacts their effectiveness in real-world scenarios and is essential for trip planning and boosting user confidence in using these. To this effect, recent studies have utilised physical models customised for specific mobility tools and conditions, but these models struggle with generalization and effectiveness in real-world scenarios due to a notable absence of open datasets for thorough model evaluation and verification. To fill this gap, our work presents an open dataset, collected in Dublin, Ireland, specifically designed for energy modelling research related to E-Scooters and E-Bikes. Furthermore, we provide a comprehensive analysis of energy consumption modelling based on the dataset using a set of representative machine learning algorithms and compare their performance against the contemporary mathematical models as a baseline. Our results demonstrate a notable advantage for data-driven models in comparison to the corresponding mathematical models for estimating energy consumption. Specifically, data-driven models outperform physical models in accuracy by up to 83.83% for E-Bikes and 82.16% for E-Scooters based on an in-depth analysis of the dataset under certain assumptions.
Optimal Design and Implementation of an Open-source Emulation Platform for User-Centric Shared E-mobility Services
Mar 12, 2024In response to the escalating global challenge of increasing emissions and pollution in transportation, shared electric mobility services, encompassing e-cars, e-bikes, and e-scooters, have emerged as a popular strategy. However, existingshared electric mobility services exhibit critical design deficiencies, including insufficient service integration, imprecise energy consumption forecasting, limited scalability and geographical coverage, and a notable absence of a user-centric perspective, particularly in the context of multi-modal transportation. More importantly, there is no consolidated open-source framework which could benefit the e-mobility research community. This paper aims to bridge this gap by providing a pioneering open-source framework for shared e-mobility. The proposed framework, with an agent-in-the-loop approach and modular architecture, is tailored to diverse user preferences and offers enhanced customization. We demonstrate the viability of this framework by solving an integrated multi-modal route-optimization problem using the modified Ant Colony Optimization (ACO) algorithm. The primary contribution of this work is to provide a collaborative and transparent framework to tackle the dynamic challenges in the field of e-mobility research using a consolidated approach.
A Review on AI Algorithms for Energy Management in E-Mobility Services
Sep 26, 2023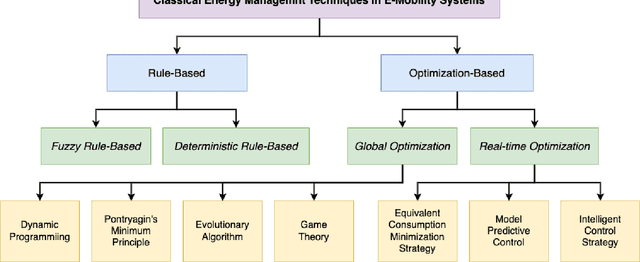
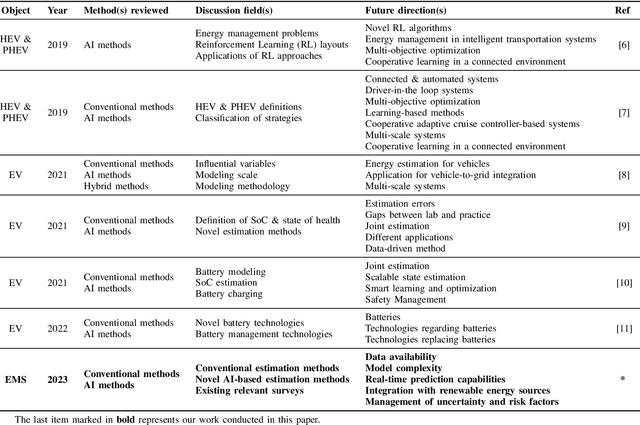
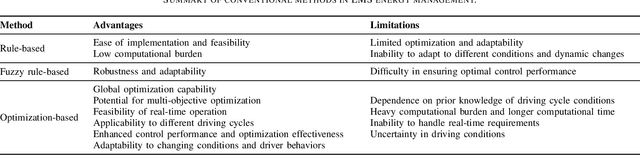
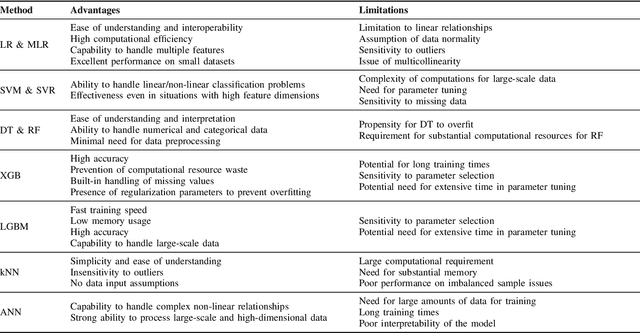
E-mobility, or electric mobility, has emerged as a pivotal solution to address pressing environmental and sustainability concerns in the transportation sector. The depletion of fossil fuels, escalating greenhouse gas emissions, and the imperative to combat climate change underscore the significance of transitioning to electric vehicles (EVs). This paper seeks to explore the potential of artificial intelligence (AI) in addressing various challenges related to effective energy management in e-mobility systems (EMS). These challenges encompass critical factors such as range anxiety, charge rate optimization, and the longevity of energy storage in EVs. By analyzing existing literature, we delve into the role that AI can play in tackling these challenges and enabling efficient energy management in EMS. Our objectives are twofold: to provide an overview of the current state-of-the-art in this research domain and propose effective avenues for future investigations. Through this analysis, we aim to contribute to the advancement of sustainable and efficient e-mobility solutions, shaping a greener and more sustainable future for transportation.