 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCORL: Reinforcement Learning of MILP Policies Solved via Branch and Bound
Dec 11, 2025Combinatorial sequential decision making problems are typically modeled as mixed integer linear programs (MILPs) and solved via branch and bound (B&B) algorithms. The inherent difficulty of modeling MILPs that accurately represent stochastic real world problems leads to suboptimal performance in the real world. Recently, machine learning methods have been applied to build MILP models for decision quality rather than how accurately they model the real world problem. However, these approaches typically rely on supervised learning, assume access to true optimal decisions, and use surrogates for the MILP gradients. In this work, we introduce a proof of concept CORL framework that end to end fine tunes an MILP scheme using reinforcement learning (RL) on real world data to maximize its operational performance. We enable this by casting an MILP solved by B&B as a differentiable stochastic policy compatible with RL. We validate the CORL method in a simple illustrative combinatorial sequential decision making example.
Quasi-Newton Compatible Actor-Critic for Deterministic Policies
Nov 12, 2025In this paper, we propose a second-order deterministic actor-critic framework in reinforcement learning that extends the classical deterministic policy gradient method to exploit curvature information of the performance function. Building on the concept of compatible function approximation for the critic, we introduce a quadratic critic that simultaneously preserves the true policy gradient and an approximation of the performance Hessian. A least-squares temporal difference learning scheme is then developed to estimate the quadratic critic parameters efficiently. This construction enables a quasi-Newton actor update using information learned by the critic, yielding faster convergence compared to first-order methods. The proposed approach is general and applicable to any differentiable policy class. Numerical examples demonstrate that the method achieves improved convergence and performance over standard deterministic actor-critic baselines.
Safe Reinforcement Learning using Action Projection: Safeguard the Policy or the Environment?
Sep 16, 2025Projection-based safety filters, which modify unsafe actions by mapping them to the closest safe alternative, are widely used to enforce safety constraints in reinforcement learning (RL). Two integration strategies are commonly considered: Safe environment RL (SE-RL), where the safeguard is treated as part of the environment, and safe policy RL (SP-RL), where it is embedded within the policy through differentiable optimization layers. Despite their practical relevance in safety-critical settings, a formal understanding of their differences is lacking. In this work, we present a theoretical comparison of SE-RL and SP-RL. We identify a key distinction in how each approach is affected by action aliasing, a phenomenon in which multiple unsafe actions are projected to the same safe action, causing information loss in the policy gradients. In SE-RL, this effect is implicitly approximated by the critic, while in SP-RL, it manifests directly as rank-deficient Jacobians during backpropagation through the safeguard. Our contributions are threefold: (i) a unified formalization of SE-RL and SP-RL in the context of actor-critic algorithms, (ii) a theoretical analysis of their respective policy gradient estimates, highlighting the role of action aliasing, and (iii) a comparative study of mitigation strategies, including a novel penalty-based improvement for SP-RL that aligns with established SE-RL practices. Empirical results support our theoretical predictions, showing that action aliasing is more detrimental for SP-RL than for SE-RL. However, with appropriate improvement strategies, SP-RL can match or outperform improved SE-RL across a range of environments. These findings provide actionable insights for choosing and refining projection-based safe RL methods based on task characteristics.
Offline Guarded Safe Reinforcement Learning for Medical Treatment Optimization Strategies
May 22, 2025When applying offline reinforcement learning (RL) in healthcare scenarios, the out-of-distribution (OOD) issues pose significant risks, as inappropriate generalization beyond clinical expertise can result in potentially harmful recommendations. While existing methods like conservative Q-learning (CQL) attempt to address the OOD issue, their effectiveness is limited by only constraining action selection by suppressing uncertain actions. This action-only regularization imitates clinician actions that prioritize short-term rewards, but it fails to regulate downstream state trajectories, thereby limiting the discovery of improved long-term treatment strategies. To safely improve policy beyond clinician recommendations while ensuring that state-action trajectories remain in-distribution, we propose \textit{Offline Guarded Safe Reinforcement Learning} ($\mathsf{OGSRL}$), a theoretically grounded model-based offline RL framework. $\mathsf{OGSRL}$ introduces a novel dual constraint mechanism for improving policy with reliability and safety. First, the OOD guardian is established to specify clinically validated regions for safe policy exploration. By constraining optimization within these regions, it enables the reliable exploration of treatment strategies that outperform clinician behavior by leveraging the full patient state history, without drifting into unsupported state-action trajectories. Second, we introduce a safety cost constraint that encodes medical knowledge about physiological safety boundaries, providing domain-specific safeguards even in areas where training data might contain potentially unsafe interventions. Notably, we provide theoretical guarantees on safety and near-optimality: policies that satisfy these constraints remain in safe and reliable regions and achieve performance close to the best possible policy supported by the data.
Differentiable Nonlinear Model Predictive Control
May 02, 2025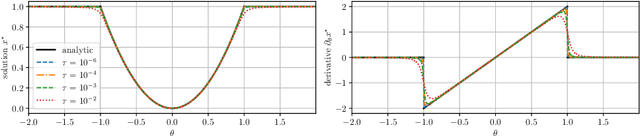

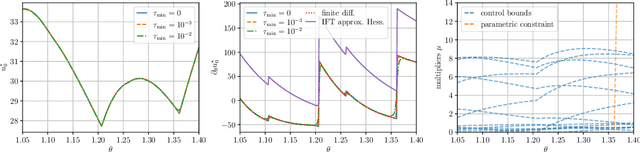

The efficient computation of parametric solution sensitivities is a key challenge in the integration of learning-enhanced methods with nonlinear model predictive control (MPC), as their availability is crucial for many learning algorithms. While approaches presented in the machine learning community are limited to convex or unconstrained formulations, this paper discusses the computation of solution sensitivities of general nonlinear programs (NLPs) using the implicit function theorem (IFT) and smoothed optimality conditions treated in interior-point methods (IPM). We detail sensitivity computation within a sequential quadratic programming (SQP) method which employs an IPM for the quadratic subproblems. The publication is accompanied by an efficient open-source implementation within the framework, providing both forward and adjoint sensitivities for general optimal control problems, achieving speedups exceeding 3x over the state-of-the-art solver mpc.pytorch.
Synthesis of Model Predictive Control and Reinforcement Learning: Survey and Classification
Feb 04, 2025



The fields of MPC and RL consider two successful control techniques for Markov decision processes. Both approaches are derived from similar fundamental principles, and both are widely used in practical applications, including robotics, process control, energy systems, and autonomous driving. Despite their similarities, MPC and RL follow distinct paradigms that emerged from diverse communities and different requirements. Various technical discrepancies, particularly the role of an environment model as part of the algorithm, lead to methodologies with nearly complementary advantages. Due to their orthogonal benefits, research interest in combination methods has recently increased significantly, leading to a large and growing set of complex ideas leveraging MPC and RL. This work illuminates the differences, similarities, and fundamentals that allow for different combination algorithms and categorizes existing work accordingly. Particularly, we focus on the versatile actor-critic RL approach as a basis for our categorization and examine how the online optimization approach of MPC can be used to improve the overall closed-loop performance of a policy.
All AI Models are Wrong, but Some are Optimal
Jan 10, 2025



AI models that predict the future behavior of a system (a.k.a. predictive AI models) are central to intelligent decision-making. However, decision-making using predictive AI models often results in suboptimal performance. This is primarily because AI models are typically constructed to best fit the data, and hence to predict the most likely future rather than to enable high-performance decision-making. The hope that such prediction enables high-performance decisions is neither guaranteed in theory nor established in practice. In fact, there is increasing empirical evidence that predictive models must be tailored to decision-making objectives for performance. In this paper, we establish formal (necessary and sufficient) conditions that a predictive model (AI-based or not) must satisfy for a decision-making policy established using that model to be optimal. We then discuss their implications for building predictive AI models for sequential decision-making.
Application of Soft Actor-Critic Algorithms in Optimizing Wastewater Treatment with Time Delays Integration
Nov 27, 2024

Wastewater treatment plants face unique challenges for process control due to their complex dynamics, slow time constants, and stochastic delays in observations and actions. These characteristics make conventional control methods, such as Proportional-Integral-Derivative controllers, suboptimal for achieving efficient phosphorus removal, a critical component of wastewater treatment to ensure environmental sustainability. This study addresses these challenges using a novel deep reinforcement learning approach based on the Soft Actor-Critic algorithm, integrated with a custom simulator designed to model the delayed feedback inherent in wastewater treatment plants. The simulator incorporates Long Short-Term Memory networks for accurate multi-step state predictions, enabling realistic training scenarios. To account for the stochastic nature of delays, agents were trained under three delay scenarios: no delay, constant delay, and random delay. The results demonstrate that incorporating random delays into the reinforcement learning framework significantly improves phosphorus removal efficiency while reducing operational costs. Specifically, the delay-aware agent achieved 36% reduction in phosphorus emissions, 55% higher reward, 77% lower target deviation from the regulatory limit, and 9% lower total costs than traditional control methods in the simulated environment. These findings underscore the potential of reinforcement learning to overcome the limitations of conventional control strategies in wastewater treatment, providing an adaptive and cost-effective solution for phosphorus removal.
Flipping-based Policy for Chance-Constrained Markov Decision Processes
Oct 09, 2024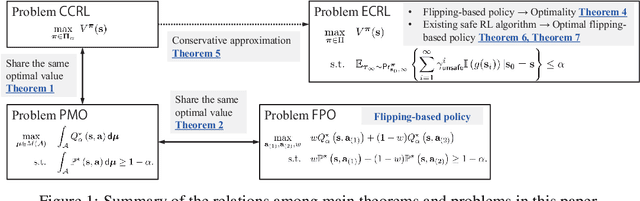
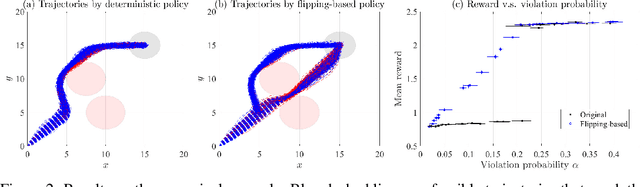
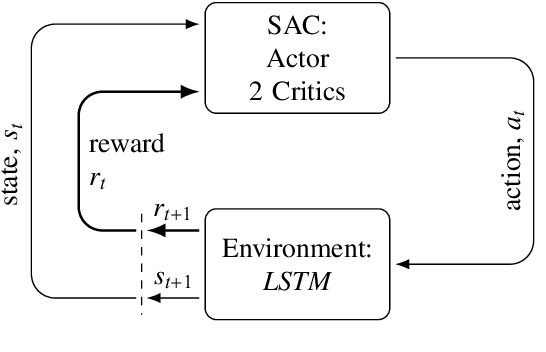
Safe reinforcement learning (RL) is a promising approach for many real-world decision-making problems where ensuring safety is a critical necessity. In safe RL research, while expected cumulative safety constraints (ECSCs) are typically the first choices, chance constraints are often more pragmatic for incorporating safety under uncertainties. This paper proposes a \textit{flipping-based policy} for Chance-Constrained Markov Decision Processes (CCMDPs). The flipping-based policy selects the next action by tossing a potentially distorted coin between two action candidates. The probability of the flip and the two action candidates vary depending on the state. We establish a Bellman equation for CCMDPs and further prove the existence of a flipping-based policy within the optimal solution sets. Since solving the problem with joint chance constraints is challenging in practice, we then prove that joint chance constraints can be approximated into Expected Cumulative Safety Constraints (ECSCs) and that there exists a flipping-based policy in the optimal solution sets for constrained MDPs with ECSCs. As a specific instance of practical implementations, we present a framework for adapting constrained policy optimization to train a flipping-based policy. This framework can be applied to other safe RL algorithms. We demonstrate that the flipping-based policy can improve the performance of the existing safe RL algorithms under the same limits of safety constraints on Safety Gym benchmarks.
Battery Capacity Knee Identification Using Unsupervised Time Series Segmentation
Apr 23, 2023



Capacity knees have been observed in experimental tests of commercial lithium-ion cells of various chemistry types under different operating conditions. Their occurrence can have a significant impact on safety and profitability in battery applications. To address concerns arising from possible knee occurrence in battery applications, this work proposes an algorithm to identify capacity knees as well as their onset from capacity fade curves. The proposed capacity knee identification algorithm is validated on both synthetic degradation data and experimental degradation data of two different battery chemistries, and is also benchmarked to the state-of-the-art knee identification algorithm in the literature. The results demonstrate that our proposed capacity knee identification algorithm could successfully identify capacity knees when the state-of-the-art knee identification algorithm failed. The results can contribute to a better understanding of capacity knees and the proposed capacity knee identification algorithm can be used to, for example, systematically evaluate the knee prediction performance of both model-based methods, and data-driven methods and facilitate better classification of retired automotive batteries from safety and profitability perspectives.