 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatiotemporal Multi-Task Graph Transformer for Trip-Level Transit Prediction
May 30, 2026Passenger count data from public transit systems reveals urban mobility patterns and is essential for planning, operation, and optimisation. However, non-linear spatiotemporal interdependencies across stops and lines make modelling and prediction challenging. Existing approaches often rely on fixed temporal, spatial, or stop-level formulations, limiting their ability to capture within-trip evolution and network context. This study proposes SMT-GraphFormer, a spatiotemporal multi-task graph transformer that frames trip-level transit prediction as sequence-to-sequence modelling. Given a line's stop sequence and trip-level context, the model predicts successive boarding and alighting counts, with delay and dwell time treated as encoder-side surrogate tasks. Key components include graph embeddings for multi-relational stop similarity, a context encoder for weather and temporal information, and a multi-gate mixture-of-experts module that produces task-specific decoder representations for boarding and alighting predictions. Evaluation on public bus transit data from Trondheim, Norway, shows that SMT-GraphFormer outperforms stop-level tabular benchmarks, with ablation studies examining each component's contribution. The sequential formulation yields substantial gains on alighting prediction ($+$0.24 in $R^2$) and consistent improvements on boarding, delay, and dwell, confirming the value of explicit trip-level sequential bias and inter-target dependencies. These findings demonstrate the potential of transformer-based sequence modelling for capturing complex spatiotemporal dynamics in public transit and underscore the value of architectures tailored to transit data rather than off-the-shelf tabular models. The proposed framework provides a horizon-agnostic basis for scenario analysis in digital twin environments, supporting informed decision-making by planners and transit operators.
Digital Twin-Driven Communication-Efficient Federated Anomaly Detection for Industrial IoT
Jan 05, 2026Anomaly detection is increasingly becoming crucial for maintaining the safety, reliability, and efficiency of industrial systems. Recently, with the advent of digital twins and data-driven decision-making, several statistical and machine-learning methods have been proposed. However, these methods face several challenges, such as dependence on only real sensor datasets, limited labeled data, high false alarm rates, and privacy concerns. To address these problems, we propose a suite of digital twin-integrated federated learning (DTFL) methods that enhance global model performance while preserving data privacy and communication efficiency. Specifically, we present five novel approaches: Digital Twin-Based Meta-Learning (DTML), Federated Parameter Fusion (FPF), Layer-wise Parameter Exchange (LPE), Cyclic Weight Adaptation (CWA), and Digital Twin Knowledge Distillation (DTKD). Each method introduces a unique mechanism to combine synthetic and real-world knowledge, balancing generalization with communication overhead. We conduct an extensive experiment using a publicly available cyber-physical anomaly detection dataset. For a target accuracy of 80%, CWA reaches the target in 33 rounds, FPF in 41 rounds, LPE in 48 rounds, and DTML in 87 rounds, whereas the standard FedAvg baseline and DTKD do not reach the target within 100 rounds. These results highlight substantial communication-efficiency gains (up to 62% fewer rounds than DTML and 31% fewer than LPE) and demonstrate that integrating DT knowledge into FL accelerates convergence to operationally meaningful accuracy thresholds for IIoT anomaly detection.
Predictive Digital Twin for Condition Monitoring Using Thermal Imaging
Nov 08, 2024



This paper explores the development and practical application of a predictive digital twin specifically designed for condition monitoring, using advanced mathematical models and thermal imaging techniques. Our work presents a comprehensive approach to integrating Proper Orthogonal Decomposition (POD), Robust Principal Component Analysis (RPCA), and Dynamic Mode Decomposition (DMD) to establish a robust predictive digital twin framework. We employ these methods in a real-time experimental setup involving a heated plate monitored through thermal imaging. This system effectively demonstrates the digital twin's capabilities in real-time predictions, condition monitoring, and anomaly detection. Additionally, we introduce the use of a human-machine interface that includes virtual reality, enhancing user interaction and system understanding. The primary contributions of our research lie in the demonstration of these advanced techniques in a tangible setup, showcasing the potential of digital twins to transform industry practices by enabling more proactive and strategic asset management.
Diagnostic Digital Twin for Anomaly Detection in Floating Offshore Wind Energy
Jun 04, 2024The demand for condition-based and predictive maintenance is rising across industries, especially for remote, high-value, and high-risk assets. In this article, the diagnostic digital twin concept is introduced, discussed, and implemented for a floating offshore turbine. A diagnostic digital twin is a virtual representation of an asset that combines real-time data and models to monitor damage, detect anomalies, and diagnose failures, thereby enabling condition-based and predictive maintenance. By applying diagnostic digital twins to offshore assets, unexpected failures can be alleviated, but the implementation can prove challenging. Here, a diagnostic digital twin is implemented for an operational floating offshore wind turbine. The asset is monitored through measurements. Unsupervised learning methods are employed to build a normal operation model, detect anomalies, and provide a fault diagnosis. Warnings and diagnoses are sent through text messages, and a more detailed diagnosis can be accessed in a virtual reality interface. The diagnostic digital twin successfully detected an anomaly with high confidence hours before a failure occurred. The paper concludes by discussing diagnostic digital twins in the broader context of offshore engineering. The presented approach can be generalized to other offshore assets to improve maintenance and increase the lifetime, efficiency, and sustainability of offshore assets.
Privacy Re-identification Attacks on Tabular GANs
Mar 31, 2024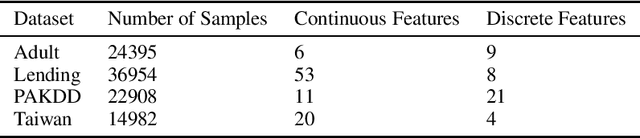
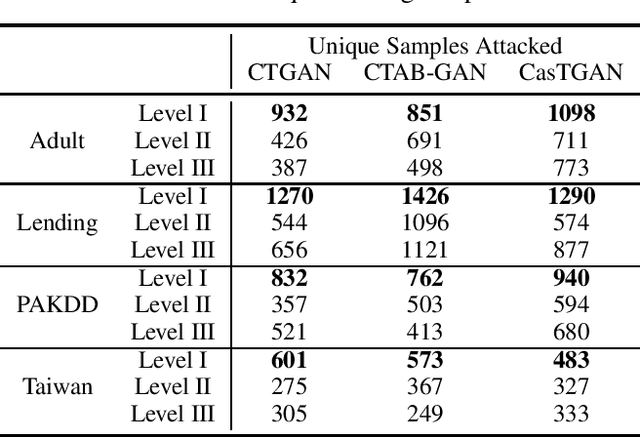
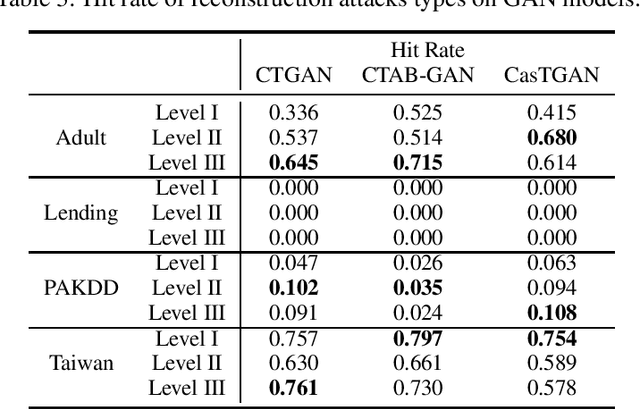
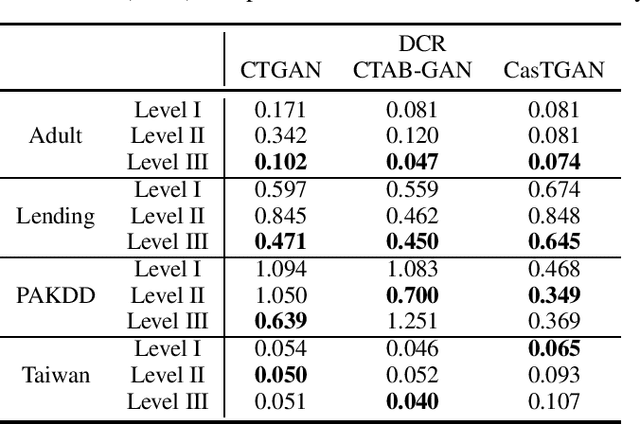
Generative models are subject to overfitting and thus may potentially leak sensitive information from the training data. In this work. we investigate the privacy risks that can potentially arise from the use of generative adversarial networks (GANs) for creating tabular synthetic datasets. For the purpose, we analyse the effects of re-identification attacks on synthetic data, i.e., attacks which aim at selecting samples that are predicted to correspond to memorised training samples based on their proximity to the nearest synthetic records. We thus consider multiple settings where different attackers might have different access levels or knowledge of the generative model and predictive, and assess which information is potentially most useful for launching more successful re-identification attacks. In doing so we also consider the situation for which re-identification attacks are formulated as reconstruction attacks, i.e., the situation where an attacker uses evolutionary multi-objective optimisation for perturbing synthetic samples closer to the training space. The results indicate that attackers can indeed pose major privacy risks by selecting synthetic samples that are likely representative of memorised training samples. In addition, we notice that privacy threats considerably increase when the attacker either has knowledge or has black-box access to the generative models. We also find that reconstruction attacks through multi-objective optimisation even increase the risk of identifying confidential samples.
Variational Autoencoders for exteroceptive perception in reinforcement learning-based collision avoidance
Mar 31, 2024



Modern control systems are increasingly turning to machine learning algorithms to augment their performance and adaptability. Within this context, Deep Reinforcement Learning (DRL) has emerged as a promising control framework, particularly in the domain of marine transportation. Its potential for autonomous marine applications lies in its ability to seamlessly combine path-following and collision avoidance with an arbitrary number of obstacles. However, current DRL algorithms require disproportionally large computational resources to find near-optimal policies compared to the posed control problem when the searchable parameter space becomes large. To combat this, our work delves into the application of Variational AutoEncoders (VAEs) to acquire a generalized, low-dimensional latent encoding of a high-fidelity range-finding sensor, which serves as the exteroceptive input to a DRL agent. The agent's performance, encompassing path-following and collision avoidance, is systematically tested and evaluated within a stochastic simulation environment, presenting a comprehensive exploration of our proposed approach in maritime control systems.
Computationally and Memory-Efficient Robust Predictive Analytics Using Big Data
Mar 27, 2024



In the current data-intensive era, big data has become a significant asset for Artificial Intelligence (AI), serving as a foundation for developing data-driven models and providing insight into various unknown fields. This study navigates through the challenges of data uncertainties, storage limitations, and predictive data-driven modeling using big data. We utilize Robust Principal Component Analysis (RPCA) for effective noise reduction and outlier elimination, and Optimal Sensor Placement (OSP) for efficient data compression and storage. The proposed OSP technique enables data compression without substantial information loss while simultaneously reducing storage needs. While RPCA offers an enhanced alternative to traditional Principal Component Analysis (PCA) for high-dimensional data management, the scope of this work extends its utilization, focusing on robust, data-driven modeling applicable to huge data sets in real-time. For that purpose, Long Short-Term Memory (LSTM) networks, a type of recurrent neural network, are applied to model and predict data based on a low-dimensional subset obtained from OSP, leading to a crucial acceleration of the training phase. LSTMs are feasible for capturing long-term dependencies in time series data, making them particularly suited for predicting the future states of physical systems on historical data. All the presented algorithms are not only theorized but also simulated and validated using real thermal imaging data mapping a ship's engine.
Digital Twin for Autonomous Surface Vessels for Safe Maritime Navigation
Jan 08, 2024



Autonomous surface vessels (ASVs) play an increasingly important role in the safety and sustainability of open sea operations. Since most maritime accidents are related to human failure, intelligent algorithms for autonomous collision avoidance and path following can drastically reduce the risk in the maritime sector. A DT is a virtual representative of a real physical system and can enhance the situational awareness (SITAW) of such an ASV to generate optimal decisions. This work builds on an existing DT framework for ASVs and demonstrates foundations for enabling predictive, prescriptive, and autonomous capabilities. In this context, sophisticated target tracking approaches are crucial for estimating and predicting the position and motion of other dynamic objects. The applied tracking method is enabled by real-time automatic identification system (AIS) data and synthetic light detection and ranging (Lidar) measurements. To guarantee safety during autonomous operations, we applied a predictive safety filter, based on the concept of nonlinear model predictive control (NMPC). The approaches are implemented into a DT built with the Unity game engine. As a result, this work demonstrates the potential of a DT capable of making predictions, playing through various what-if scenarios, and providing optimal control decisions according to its enhanced SITAW.
Data Integration Framework for Virtual Reality Enabled Digital Twins
Jan 04, 2024



Digital twins are becoming increasingly popular across many industries for real-time data streaming, processing, and visualization. They allow stakeholders to monitor, diagnose, and optimize assets. Emerging technologies used for immersive visualization, such as virtual reality, open many new possibilities for intuitive access and monitoring of remote assets through digital twins. This is specifically relevant for floating wind farms, where access is often limited. However, the integration of data from multiple sources and access through different devices including virtual reality headsets can be challenging. In this work, a data integration framework for static and real-time data from various sources on the assets and their environment is presented that allows collecting and processing of data in Python and deploying the data in real-time through Unity on different devices, including virtual reality headsets. The integration of data from terrain, weather, and asset geometry is explained in detail. A real-time data stream from the asset to the clients is implemented and reviewed, and instructions are given on the code required to connect Python scripts to any Unity application across devices. The data integration framework is implemented for a digital twin of a floating wind turbine and an onshore wind farm, and the potential for future research is discussed.
Modular Control Architecture for Safe Marine Navigation: Reinforcement Learning and Predictive Safety Filters
Dec 04, 2023



Many autonomous systems face safety challenges, requiring robust closed-loop control to handle physical limitations and safety constraints. Real-world systems, like autonomous ships, encounter nonlinear dynamics and environmental disturbances. Reinforcement learning is increasingly used to adapt to complex scenarios, but standard frameworks ensuring safety and stability are lacking. Predictive Safety Filters (PSF) offer a promising solution, ensuring constraint satisfaction in learning-based control without explicit constraint handling. This modular approach allows using arbitrary control policies, with the safety filter optimizing proposed actions to meet physical and safety constraints. We apply this approach to marine navigation, combining RL with PSF on a simulated Cybership II model. The RL agent is trained on path following and collision avpodance, while the PSF monitors and modifies control actions for safety. Results demonstrate the PSF's effectiveness in maintaining safety without hindering the RL agent's learning rate and performance, evaluated against a standard RL agent without PSF.