 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExplainable Wastewater Digital Twins: Adaptive Context-Conditioned Structured Simulators with Self-Falsifying Decision Support
May 19, 2026Operators of safety-critical industrial processes increasingly rely on digital twins to screen control interventions, but such simulators rarely carry certified safety guarantees. Wastewater treatment plants exemplify the gap: operators face a daily safety-efficiency trade-off where aerating too little risks effluent violations and nitrous-oxide (N2O) spikes, and aerating too much wastes energy. We develop an explainable digital twin for aeration and dosing setpoints. CCSS-IX, the simulator, is a bank of interpretable locally linear state-space "experts" adaptively mixed by a context-aware gating network, building on a continuous-time regime-switching scaffold. A runtime decision layer applies conformal risk control to abstain, reopen, or return a falsifying temporal witness for any operator-proposed action that cannot be statistically certified. The artificial-intelligence contribution is twofold: an identifiable, context-conditioned structured surrogate that retains operator-readable dynamics, and a self-falsifying decision rule with finite-sample coverage guarantees. The engineering contribution is a validated, end-to-end decision-support pipeline, tested on a 1000-step slice of the Avedøre full-scale plant (42.6% sensor missingness, 2-minute sampling), the Agtrup/BlueKolding full-scale plant in Denmark, and the Benchmark Simulation Model No. 2 (BSM2) international benchmark, under a matched ten-seed protocol. The static structured ensemble lies within 0.78% root-mean-square error of an unconstrained black-box reference, and the adaptive variant within 1.08%. The calibrated reopen rule cuts aggregate two-plant regret by 43.6% at an unsafe-action cost weight of 4 and eliminates unsafe chosen actions on the BSM2 main slice. Event-aligned temporal witnesses prevent 93 of 187 false-safe N2O approvals, about 4.65x the dyadic baseline (paired McNemar p < 1e-21).
DART: A Vision-Language Foundation Model for Comprehensive Rope Condition Monitoring
May 06, 2026The condition monitoring (CM) of synthetic fibre ropes (SFRs) used in offshore, maritime, and industrial settings demands more than a classifier: inspectors need continuous severity estimates, maintenance recommendations, anomaly flags, deterioration timelines, and automated reports, all from a single inspection image. We present DART (Damage Assessment via Rope Transformer), a vision-language foundation model that addresses the full rope inspection workflow through a unified multi-task architecture. DART extends the Joint-Embedding Predictive Architecture (JEPA) to the cross-modal domain by coupling a Vision Transformer (ViT-H/14) with Llama-3.2-3B-Instruct via a Severity-Conditioned Cross-Modal Fusion (SC-CMF) module. Three architectural innovations drive the model's versatility: (1) HD-MASK, a saliency-guided masking strategy that focuses self-supervised reconstruction on damage-dense patches; (2) per-class learnable severity gates that adaptively weight language grounding by damage category; and (3) a Contrastive Damage Disentanglement (CDD) loss that shapes the embedding space to simultaneously encode damage type, severity ordering, and cross-modal semantics. Trained once on 4,270 images spanning 14 fine-grained rope damage classes, the frozen DART backbone supports downstream tasks without any task-specific fine-tuning: damage classification (93.22 % accuracy, 91.04 % macro-F1, +38.5 pp over a vision-only baseline), continuous severity regression (Spearman rho = 0.94, within-1-ordinal accuracy 99.6 %), few-shot recognition (89.2 % macro-F1 at 20 shots). These results demonstrate that DART functions as a general-purpose CM backbone that goes well beyond classification, providing actionable inspection intelligence from a single shared representation.
Imagery Dataset for Remaining Useful Life Estimation of Synthetic Fibre Ropes
May 05, 2026Remaining useful life (RUL) estimation of synthetic fibre ropes (SFRs) is critical for safe operation in offshore-crane, wind turbine installation, and heavy-load handling applications, where rope failure can result in catastrophic safety incidents and costly downtime. Despite growing research interest in data-driven condition monitoring, there is no publicly available image dataset that captures the complete degradation lifecycle of SFRs under controlled cyclic fatigue loading. To address this gap, we present a novel image dataset comprising approximately 34,700 high-resolution images of eleven Dyneema SK75/78 high-modulus polyethylene (HMPE) rope samples subjected to cyclic fatigue on a sheave-bend test stand at seven distinct axial load levels ranging from 60 kN to 280 kN. Ropes were loaded until mechanical failure, with fatigue lifetimes ranging from 695 cycles to 8,340 cycles. After every fixed number of sheave cycles (an inspection burst), ten images were captured at different cross-sectional positions along the rope, providing spatially representative sampling of surface degradation throughout the rope's entire service life. The images obtained from each load are annotated with the corresponding elapsed cycle count, enabling a direct computation of RUL for any rope in the sequence. This dataset aims to support a broad range of machine learning (ML) tasks including RUL regression, damage progression modelling, anomaly detection, and load-conditioned prognostics. The dataset is intended to serve as a benchmark resource for the development and comparison of vision-based condition monitoring (CM) and prognostics algorithms for SFRs.
Data-Driven Open-Loop Simulation for Digital-Twin Operator Decision Support in Wastewater Treatment
Apr 22, 2026Wastewater treatment plants (WWTPs) need digital-twin-style decision support tools that can simulate plant response under prescribed control plans, tolerate irregular and missing sensing, and remain informative over 12-36 h planning horizons. Meeting these requirements with full-scale plant data remains an open engineering-AI challenge. We present CCSS-RS, a controlled continuous-time state-space model that separates historical state inference from future control and exogenous rollout. The model combines typed context encoding, gain-weighted forcing of prescribed and forecast drivers, semigroup-consistent rollouts, and Student-t plus hurdle outputs for heavy-tailed and zero-inflated WWTP sensor data. On the public Avedøre full-scale benchmark, with 906,815 timesteps, 43% missingness, and 1-20 min irregular sampling, CCSS-RS achieves RMSE 0.696 and CRPS 0.349 at H=1000 across 10,000 test windows. This reduces RMSE by 40-46% relative to Neural CDE baselines and by 31-35% relative to simplified internal variants. Four case studies using a frozen checkpoint on test data demonstrate operational value: oxygen-setpoint perturbations shift predicted ammonium by -2.3 to +1.4 over horizons 300-1000; a smoothed setpoint plan ranks first in multi-criterion screening; context-only sensor outages raise monitored-variable RMSE by at most 10%; and ammonium, nitrate, and oxygen remain more accurate than persistence throughout the rollout. These results establish CCSS-RS as a practical learned simulator for offline scenario screening in industrial wastewater treatment, complementary to mechanistic models.
STDiff: A State Transition Diffusion Framework for Time Series Imputation in Industrial Systems
Aug 28, 2025Most deep learning methods for imputing missing values treat the task as completing patterns within a fixed time window. This assumption often fails in industrial systems, where dynamics are driven by control actions, are highly non-stationary, and can experience long, uninterrupted gaps. We propose STDiff, which reframes imputation as learning how the system evolves from one state to the next. STDiff uses a conditional denoising diffusion model with a causal bias aligned to control theory, generating missing values step-by-step based on the most recent known state and relevant control or environmental inputs. On a public wastewater treatment dataset with simulated missing blocks, STDiff consistently achieves the lowest errors, with its advantage increasing for longer gaps. On a raw industrial dataset with substantial real gaps, it produces trajectories that remain dynamically plausible, in contrast to window-based models that tend to flatten or over-smooth. These results support dynamics-aware, explicitly conditioned imputation as a robust approach for industrial time series, and we discuss computational trade-offs and extensions to broader domains.
FungalZSL: Zero-Shot Fungal Classification with Image Captioning Using a Synthetic Data Approach
Feb 26, 2025The effectiveness of zero-shot classification in large vision-language models (VLMs), such as Contrastive Language-Image Pre-training (CLIP), depends on access to extensive, well-aligned text-image datasets. In this work, we introduce two complementary data sources, one generated by large language models (LLMs) to describe the stages of fungal growth and another comprising a diverse set of synthetic fungi images. These datasets are designed to enhance CLIPs zero-shot classification capabilities for fungi-related tasks. To ensure effective alignment between text and image data, we project them into CLIPs shared representation space, focusing on different fungal growth stages. We generate text using LLaMA3.2 to bridge modality gaps and synthetically create fungi images. Furthermore, we investigate knowledge transfer by comparing text outputs from different LLM techniques to refine classification across growth stages.
Application of Soft Actor-Critic Algorithms in Optimizing Wastewater Treatment with Time Delays Integration
Nov 27, 2024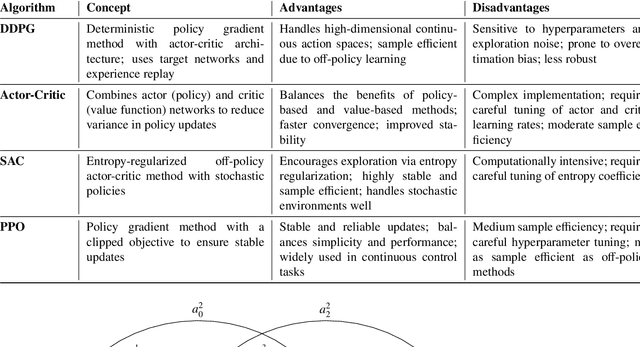
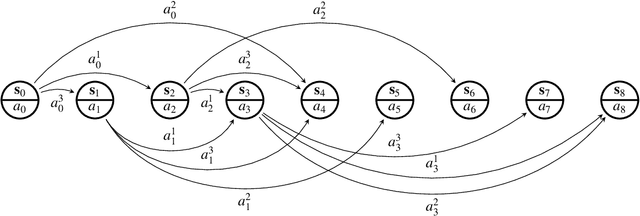
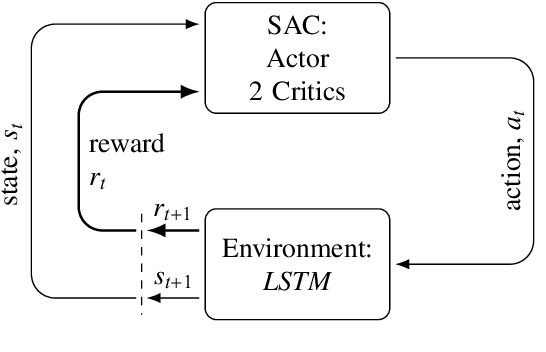

Wastewater treatment plants face unique challenges for process control due to their complex dynamics, slow time constants, and stochastic delays in observations and actions. These characteristics make conventional control methods, such as Proportional-Integral-Derivative controllers, suboptimal for achieving efficient phosphorus removal, a critical component of wastewater treatment to ensure environmental sustainability. This study addresses these challenges using a novel deep reinforcement learning approach based on the Soft Actor-Critic algorithm, integrated with a custom simulator designed to model the delayed feedback inherent in wastewater treatment plants. The simulator incorporates Long Short-Term Memory networks for accurate multi-step state predictions, enabling realistic training scenarios. To account for the stochastic nature of delays, agents were trained under three delay scenarios: no delay, constant delay, and random delay. The results demonstrate that incorporating random delays into the reinforcement learning framework significantly improves phosphorus removal efficiency while reducing operational costs. Specifically, the delay-aware agent achieved 36% reduction in phosphorus emissions, 55% higher reward, 77% lower target deviation from the regulatory limit, and 9% lower total costs than traditional control methods in the simulated environment. These findings underscore the potential of reinforcement learning to overcome the limitations of conventional control strategies in wastewater treatment, providing an adaptive and cost-effective solution for phosphorus removal.
Wastewater Treatment Plant Data for Nutrient Removal System
Jul 07, 2024This paper introduces the Agtrup (BlueKolding) dataset, collected from Denmark's Agtrup wastewater treatment plant, specifically designed to enhance phosphorus removal via chemical and biological methods. This rich dataset is assembled through a high-frequency Supervisory Control and Data Acquisition (SCADA) system data collection process, which captures a wide range of variables related to the operational dynamics of nutrient removal. It comprises time-series data featuring measurements sampled to a frequency of two minutes across various control, process, and environmental variables. The comprehensive dataset aims to foster significant advancements in wastewater management by supporting the development of sophisticated predictive models and optimizing operational strategies. By providing detailed insights into the interactions and efficiencies of chemical and biological phosphorus removal processes, the dataset serves as a vital resource for environmental researchers and engineers focused on improving the sustainability and effectiveness of wastewater treatment operations. The ultimate goal of this dataset is to facilitate the creation of digital twins and the application of machine learning techniques, such as deep reinforcement learning, to predict and enhance system performance under varying operational conditions.
Improved Long Short-Term Memory-based Wastewater Treatment Simulators for Deep Reinforcement Learning
Mar 22, 2024Even though Deep Reinforcement Learning (DRL) showed outstanding results in the fields of Robotics and Games, it is still challenging to implement it in the optimization of industrial processes like wastewater treatment. One of the challenges is the lack of a simulation environment that will represent the actual plant as accurately as possible to train DRL policies. Stochasticity and non-linearity of wastewater treatment data lead to unstable and incorrect predictions of models over long time horizons. One possible reason for the models' incorrect simulation behavior can be related to the issue of compounding error, which is the accumulation of errors throughout the simulation. The compounding error occurs because the model utilizes its predictions as inputs at each time step. The error between the actual data and the prediction accumulates as the simulation continues. We implemented two methods to improve the trained models for wastewater treatment data, which resulted in more accurate simulators: 1- Using the model's prediction data as input in the training step as a tool of correction, and 2- Change in the loss function to consider the long-term predicted shape (dynamics). The experimental results showed that implementing these methods can improve the behavior of simulators in terms of Dynamic Time Warping throughout a year up to 98% compared to the base model. These improvements demonstrate significant promise in creating simulators for biological processes that do not need pre-existing knowledge of the process but instead depend exclusively on time series data obtained from the system.
Advancements in Point Cloud-Based 3D Defect Detection and Classification for Industrial Systems: A Comprehensive Survey
Feb 20, 2024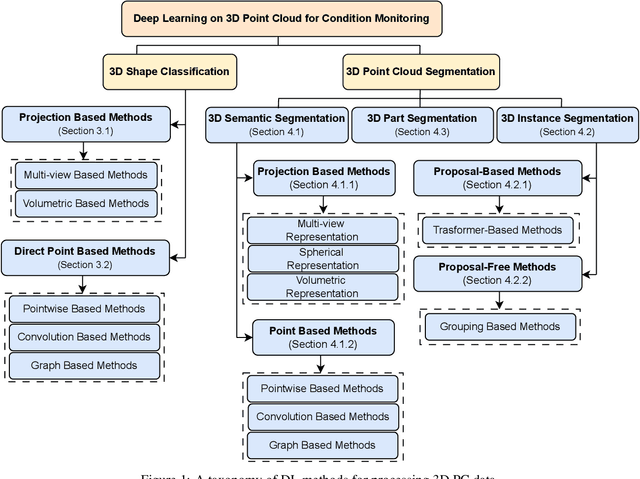
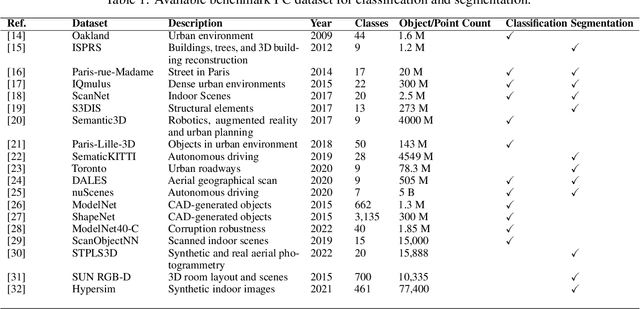
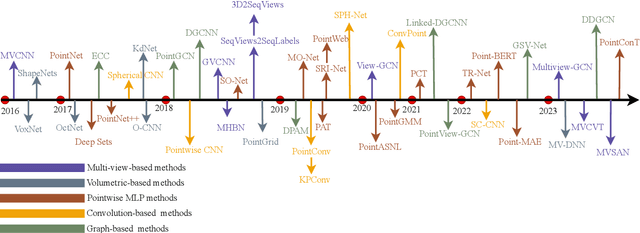
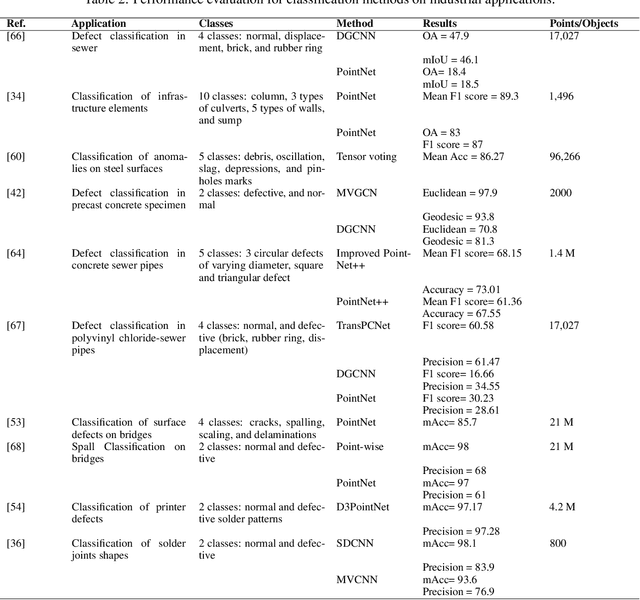
In recent years, 3D point clouds (PCs) have gained significant attention due to their diverse applications across various fields such as computer vision (CV), condition monitoring, virtual reality, robotics, autonomous driving etc. Deep learning (DL) has proven effective in leveraging 3D PCs to address various challenges previously encountered in 2D vision. However, the application of deep neural networks (DNN) to process 3D PCs presents its own set of challenges. To address these challenges, numerous methods have been proposed. This paper provides an in-depth review of recent advancements in DL-based condition monitoring (CM) using 3D PCs, with a specific focus on defect shape classification and segmentation within industrial applications for operational and maintenance purposes. Recognizing the crucial role of these aspects in industrial maintenance, the paper provides insightful observations that offer perspectives on the strengths and limitations of the reviewed DL-based PC processing methods. This synthesis of knowledge aims to contribute to the understanding and enhancement of CM processes, particularly within the framework of remaining useful life (RUL), in industrial systems.